一种安全转运智能机器人
1.本技术涉及医疗器械的领域,尤其是涉及一种安全转运智能机器人。
背景技术:
2.毒麻药品(医学中使用的麻醉类药品和毒性较强的药品)作为具有依赖性的药品,应按照国家相关法律法规严格管理。在临床管理过程中,毒麻药品转运是临床药品管理工作中重要组成部分,如未高度重视毒麻药品转运环节,则可增加在此环节上出现安全问题的风险,导致毒麻药品滥用,甚至流入非法渠道等复杂的社会问题。
3.近年来在医院高质量发展的前提下,随着信息化技术不断发展和普及,将信息系统运用于毒麻药品管理十分必要且势在必行,目前多数医院在毒麻药品信息化管理都有所推进,其主要包括电子信息化、软件开发等,但普遍存在只将书面的各项信息转变成为数据库的记录,无法规避毒麻药品转运环节中可能出现的安全问题。
技术实现要素:
4.为了提高毒麻药品转运的安全性,本技术提供一种安全转运智能机器人。
5.本技术提供的一种安全转运智能机器人采用如下的技术方案:一种安全转运智能机器人,包括机器人本体、图像采集模块、解锁模块、控制器和设置在机器人本体内的驱动机构,所述驱动机构和图像采集模块均与所述控制器连接,所述机器人本体上设置有多个药品盛放腔,所述解锁模块包括第一解锁模块和对应每个药品盛放腔的第二解锁模块,每一药品盛放腔均设置有自动门,所述第一解锁模块、第二解锁模块和所述自动门均与所述控制器连接;所述图像采集模块用于实时采集行进路径上的图像信息;所述第一解锁模块用于采集第一解锁信息,所述第二解锁模块用于采集第二解锁信息;控制器用于:接收外部输入的运送指令,输出开启信号;根据所述图像信息判断是否存在障碍物,若是,根据所述图像信息实时规划运送路径,输出规避信号;当接收到第一解锁信息和第二解锁信息,且第一解锁信息和第二解锁信息均匹配成功时,输出解锁信号;所述驱动机构用于接收所述开启信号和所述规避信号,带动机器人本体运行;所述自动门用于接收所述解锁信号开启对应的药品盛放腔。
6.通过采用上述技术方案,在机器人本体上设置有盛放药品的药品盛放腔,运送时将待运送药品放入药品盛放腔内,此时,工作人员输出的运送指令至控制器,控制器接收运送指令输出开启信号,此时驱动机构接收开启信号带动机器人本体运动,在运送过程中,通过设置在机器人本体上的图像采集模块实时采集行进路径上的图像信息,控制器根据图像
信息判断是否存在障碍物,当存在障碍物时输出规避信号,控制器接收规避信号控制驱动机构带动机器人本体规避障碍物,提高了运送路径上的安全性,同时在机器人本体上还设置有第一解锁模块和第二解锁模块,只有当第一解锁模块和第二解锁模块采集的解锁信息均正确时,此时控制器输出解锁信号控制药品盛放腔打开,进一步提高了药品运送过程中的安全性。
7.可选的,还包括报警系统,所述报警系统包括外力采集模块、现场提示模块和第一无线通讯模块,所述外力采集模块、所述现场提示模块和所述第一无线通讯模块均与控制器连接;所述外力采集模块用于实时采集所述机器人本体遭受的外力,输出外力检测信号;所述控制器被进一步配置为:接收所述外力检测信号,并根据预存的报警对照表和所述外力检测信号确定报警等级;根据所述报警等级输出相应的报警信号;所述第一无线通讯模块用于接收所述报警信号,并将所述报警信号传输至远程监控平台;现场提示模块用于接收所述报警信号报警。
8.通过采用上述技术方案,在运送过程中,通过设置在机器人本体上的外力采集模块,实时采集机器人本体收到的外力,并根据收到的外力的大小输出相应的报警信号,因为当机器人收到外力时,此时可能存在有人暴力取药的情况,设置在机器人本体上的现场提示模块接收到报警信号时,报警,起到一定的警示作用,提高药品运送过程中的安全性。
9.可选的,所述机器人本体上设置定位模块,所述定位模块分别与所述第一无线通讯模块和所述控制器连接;所述定位模块用于实时检测所述机器人本体的位置输出位置检测信号;所述控制器被进一步配置为:当接收到所述报警信号时,获取所述图像信息,识别所述图像信息中存在的危险因素图像,并将所述危险因素图像放大输出;所述第一无线通讯模块用于接收放大后的所述危险因素图像并输出至远程监控平台。
10.通过采用上述技术方案,通过设置定位模块实时检测机器人本体的位置信息,当机器人本体在运送过程中收到较大的外力时,控制器将获取到的图像信息中的可能的危险源图像放大传输至远程监控平台,当工作人员通过图像判断真的存在危险时,可通过定位模块检测到的位置信息及时得知机器人本体当前的位置,并通过较近的保安人员及时进行查看,提高药品运送过程中的安全性。
11.可选的,还包括计时模块,所述计时模块与所述控制器连接:所述控制器被进一步配置为:所述控制器内设置有预设的取药时间;当所述控制器输出解锁信号后,输出计时启动信号启动计时模块;接收所述计时模块输出的计时信号,当所述计时信号反映的时间与预设的取药时
间相同时,输出关闭信号;自动门接收所述关闭信号锁定药品盛放腔。
12.通过采用上述技术方案,通过设置计时模块,实时记录取药时间,当取药时间过长时,判断此时出现过量用药的情况,因此当取药时间达到预设值时,控制器控制药品盛放腔自动关闭,减少了过量用药的情况。
13.可选的,所述机器人本体上还设置有空安瓿回收腔,所述药品盛放腔和所述空安瓿回收腔内均设置有称重模块,所述称重模块均与所述控制器连接;位于所述药品盛放腔内的称重模块实时检测药安瓿的重量,输出第一重量检测信号;位于空安瓿回收腔内的称重模块实时检测空安瓿的重量,输出第二重量检测信号;所述控制器被进一步配置为:接收所述第一重量检测信号和第二重量检测信号;基于预设的计算规则,根据所述第一重量检测信号和所述第二重量检测信号,确定每层的药品量以及空安瓿的量。
14.通过采用上述技术方案,通过设置在药品盛放腔和空安瓿回收腔的称重模块,实时检测药品盛饭腔内药安瓿的重量和空安瓿盛放腔内的空安瓿的重量,控制器可根据检测到的重量实时计算出剩余药品的量,实现了对药品量的实时监控。
15.可选的,还包括遥控器,所述遥控器与所述控制器连接,所述遥控器用于输出控制指令实现对机器人本体的手动控制。
16.通过采用上述技术方案,通过设置遥控器,使得机器人本体的运动还可通过手动控制,为药品的运送提供了进一步的保障。
17.可选的,所述遥控器包括mcu、第二无线通讯模块、控制按键和提示模块,所述mcu分别连接所述控制按键、所述提示模块和所述第二无线通讯模块,所述mcu通过第二无线通讯模块和第一无线通讯模块配合实现与所述控制器的通信连接;所述控制器被进一步配置为:当根据所述图像信息判断是存在障碍物且判断障碍物不可避让时,输出遥控指令,并通过第一无线通讯模块和第二无线通讯模块传输至mcu;所述mcu用于接收所述遥控指令控制所述提示模块输出提示信息;所述遥控器通过控制按键实现对机器人本体的控制。
18.通过采用上述技术方案,通过在遥控器本体上设置提示模块,控制器检测到运行路径上出现不可躲避的障碍时,控制器输出遥控指令,mcu接收到遥控指令后,控制提示模块输出提示信息,以提示工作人员通过遥控器控制机器人本体行进,保证了运输效率。
19.可选的,所述机器人本体顶部设置有第一显示屏,每一所述药品盛放腔和所述空安瓿回收腔的侧壁上均设置有第二显示屏,所述第一显示屏和第二显示屏均与所述控制器连接。
20.可选的,所述机器人本体上设置有机械解锁模块。
21.可选的,所述机器人本体内设置有可充电电源,所述可充电电源与所述控制器连接,所述可充电电源连接有充电插头。
22.综上所述,本技术包括以下至少一种有益技术效果:1.在机器人本体上设置有盛放药品的药品盛放腔,运送时将待运送药品放入药品盛放腔内,此时,工作人员输出的运送指令至控制器,控制器接收运送指令输出开启信号,此时驱动机构接收开启信号带动机器人本体运动,在运送过程中,通过设置在机器人本体上的图像采集模块实时采集行进路径上的图像信息,控制器根据图像信息判断是否存在障碍物,当存在障碍物时输出规避信号,控制器接收规避信号控制驱动机构带动机器人本体规避障碍物,提高了运送路径上的安全性,同时在机器人本体上还设置有第一解锁模块和第二解锁模块,只有当第一解锁模块和第二解锁模块采集的解锁信息均正确时,此时控制器输出解锁信号控制药品盛放腔打开,进一步提高了药品运送过程中的安全性;2.在运送过程中,通过设置在机器人本体上的外力采集模块,实时采集机器人本体收到的外力,并根据收到的外力的大小输出相应的报警信号,因为当机器人收到外力时,此时可能存在有人暴力取药的情况,设置在机器人本体上的现场提示模块接收到报警信号时,报警,起到一定的警示作用,提高药品运送过程中的安全性。
附图说明
23.图1是本技术提供的安全转运智能机器人的整体结构示意图。
24.图2是本技术提供的安全转运智能机器人的遥控器的结构示意图。
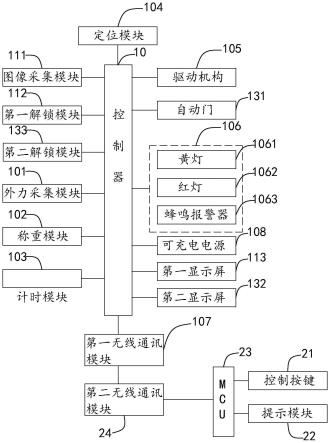
25.图3是本技术提供的安全转运智能机器人的结构框图。
26.附图标记说明:1、机器人本体;10、控制器;101、外力采集模块;102、称重模块;103、计时模块;104、定位模块;105、驱动机构;106、现场提示模块;1061、黄灯;1062、红灯;1063、蜂鸣报警器;107、第一无线通讯模块;108、可充电电源;11、第一安装部;111、图像采集模块;112、第一解锁模块;113、第一显示屏;12、第二安装部;121、驱动轮;13、药品盛放腔;131、自动门;132、第二显示屏;133、第二解锁模块;14、空安瓿回收腔;2、遥控器;21、控制按键;22、提示模块;23、mcu;24、第二无线通讯模块。
具体实施方式
27.以下结合附图1-3对本技术作进一步详细说明。
28.本技术实施例公开一种安全转运智能机器人。参照图1、图2和图3,安全转运智能机器人包括机器人本体1,机器人本体1整体呈半圆柱状,机器人本体1顶部设置有第一安装部11,底部设置有第二安装部12,第一安装部11和第二安装部12之间设置有五个半圆形的药品盛放腔13和一个半圆形的空安瓿回收腔14,药品盛放腔13和空安瓿回收腔14从上到下依次排列,在第二安装部12朝向地面的一侧设置有三个驱动轮121,三个驱动轮121呈三角形排布,在第二安装部12内部设置有驱动机构105,驱动机构105与驱动轮121连接,以用于带动驱动轮121转动和转向,本实施例中,驱动机构105为本领域技术人员的公知的结构,只要可以实现带动驱动轮121的转动和转向即可,在此不做详细赘述。
29.第一安装部11的两侧均设置有第一解锁模块112,第一解锁模块112为摄像头,并嵌设在第一安装部11的侧壁上,药品盛放腔13和空安瓿回收腔14均设置有自动门131,自动门131用于封闭或打开药品盛放腔13和空安瓿回收腔14,自动门131上设置有第二解锁模块133,第二解锁模块133为指纹采集器,本实施例中,自动门131只要可以实现自动开闭即可,
具体结构及设置方式在此不做限制。
30.第一安装部11背离药品盛放腔13的一侧设置有图像采集模块111,图像采集模块111为360
°
摄像头,可以实现对周围环境图像的全面采集,在第一安装部11的内部还设置有控制器10,控制器10分别与驱动机构105、图像采集模块111、第一解锁模块112、第二解锁模块133和自动门131连接。
31.工作时,工作人员可通过外部设备向控制器10内输入运送指令,控制器10接收运送指令输出开启信号,驱动机构105接收开始信号带动机器人本体1按预设的路径进行运送,在运送过程中,图像采集模块111实时采集运送路径上的图像信息并存储,控制器10可根据图像信息判断运送路径上是否存在障碍物,当判断存在障碍物时,判断存在的障碍物是都可避让,若是,输出规避信号,驱动机构105接收规避信号带动机器人本体1转弯规避障碍物,本实施例中,判断是否存在障碍物采用轮廓检测算法,实时识别图像信息中是否存在目标,当存在目标时,提取目标轮廓,并识别目标的大小,同时还可识别运送路径的宽度,当目标占运动路径的宽度的比例达到预设值时,判断目标为不可避让障碍物,当当目标占运动路径的宽度的比例小于预设值时,判断目标为可避让障碍物。
32.当需要取药时,首先通过第一解锁模块112采集两个人的人脸信息,在控制器13内建立面容储存库,把具有领取、管理资质的相关医务人员面容通过面容库存储,对于离职、人员调动、取消资质的人员及时从面容库中删除,在面容储存库中查找到对应的人员时匹配成功,之后通过第二解锁模块133采集人的指纹信息,当指纹信息也匹配成功时,此时控制器10输出解锁信号控制自动门131打开。
33.采用上述方式,在机器人本体1上设置有盛放药品的药品盛放腔13,运送时将待运送药品放入药品盛放腔13内,此时,工作人员输出的运送指令至控制器10,控制器10接收运送指令输出开启信号,此时驱动机构105接收开启信号带动机器人本体1运动,在运送过程中,通过设置在机器人本体1上的图像采集模块111实时采集行进路径上的图像信息,控制器10根据图像信息判断是否存在障碍物,当存在障碍物时输出规避信号,控制器10接收规避信号控制驱动机构105带动机器人本体1规避障碍物,提高了运送路径上的安全性,同时在机器人本体1上还设置有第一解锁模块112和第二解锁模块133,只有当第一解锁模块112和第二解锁模块133采集的解锁信息均正确时,此时控制器10输出解锁信号控制药品盛放腔13打开,进一步提高了药品运送过程中的安全性。
34.为了进一步提高药品运输过程的安全性,转运机器人还包括报警系统,报警系统包括外力采集模块101、现场提示模块106和第一无线通讯模块107,外力采集模块101设置在机器人本体1的侧壁上,用于实时检测机器人本体1受到的外力,输出外力检测信号,现场提示模块106设置在第一安装部11的顶部,现场提示模块106包括黄灯1061、红灯1062以及蜂鸣报警器1063,外力采集模块101、现场提示模块106和第一无线通讯模块107均与控制器10连接。本实施例中,外力采集模块101为压力传感器,在其他实施方式中,可选用其他具有受力检测功能的模块,在此不做限制。
35.工作时,控制器10接收外力检测信号,并查询报警对照表,报警对照表中设置了不同阈值对应的不同报警等级,本实施例中,当外力检测信号处于第一阈值范围时输出第一报警信号,当外力检测信号处于第二阈值范围时,输出第二报警信号,当现场提示模块106接收到第一报警信号时,黄灯1061亮,当现场提示模块106接收到第二报警信号时,红灯
1062亮且蜂鸣报警器1063启动。
36.当机器人本体1受的外力较大时,此时判定存在人为暴力取药的情况,现场提示模块106的设置可以起到一定的威慑作用,提高药品运送的安全性。
37.在机器人本体1上还设置有定位模块104,定位模块104选用gps定位模块104,当控制器10接收到的外力检测信号大于等于第一阈值时,获取图像信息,并识别图像信息中可能的危险因素图像,并将危险因素图像按一定的比例放大并通过第一无线通讯模块107传输至远程监控平台,工作人员通过观察上传的危险因素图像当判断确实存在危险时,通过定位模块104上传的定位信息实时得知机器人本体1当前所处位置,并通知附近安保人员及时前去查看,在一定程度上提高运输的安全性,本实施例中,危险因素为人或动物。
38.为了减少一些人员在用药时出现过度用药的情况,控制器10还连接有计时模块103,在控制器10内预存有取药时间,当控制器10输出解锁信号的同时输出计时开始信号,计时模块103接收计时开始信号开始计时,并实时输出计时信号,当计时信号反映的时间等于取药时间时,控制器10输出关闭信号,自动门131接收关闭信号关闭,减少出现过度取药、用药的情况。
39.为了实时对机器人本体1内药量进行统计,在药品盛放腔13和空安瓿回收腔14内均设置有称重模块102,称重模块102均与控制器10连接,工作时,位于所述药品盛放腔13内的称重模块102实时检测药安瓿的重量,输出第一重量检测信号,位于空安瓿回收腔14内的称重模块102实时检测空安瓿的重量,输出第二重量检测信号,控制器10接收第一重量检测信号和第二重量检测信号,基于预设的计算规则,根据第一重量检测信号和第二重量检测信号,确定每层的药品量以及空安瓿的量,实现对药品用量的实时监控。
40.为了便于工作人员实时了解机器人本体1内盛放的药品量以及种类,在第一安装部11上设置有第一显示屏113,第一显示屏113与控制器10连接,第一显示屏113实时显示转运机器人本体1内盛放的所有的药品名称以及药量;为了便于工作人员了解每一药品盛放腔13内盛放的药品的种类以及药量,在每一药瓶盛放腔的自动门131上均设置有第二显示屏132,第二显示平与控制器10连接时,开机后,第二显示屏132实时显示对应的药品盛放腔13内盛放的药品的种类以及药量。本实施例中,第一显示屏113和第二显示屏132均为led屏,在其他实施方式中,还可选用其他类型的显示屏,只要能实现显示即可,在此不做限制。
41.为了便于转运机器人的工作,机器人本体1内还设置有可充电电源108,可充电电源108与控制器10连接,以提供转运机器人工作所需的电量。为了便于为可充电电源108进行充电,可充电电源108还连接有充电插头,充电插头与可充电电源108通过伸缩电源线连接,使用更加灵活简便。
42.为了进一步提高转运机器人的实用性,转运机器人还包括遥控器2,遥控器2包括包括mcu23、第二无线通讯模块24、控制按键21和提示模块22,mcu23分别连接控制按键21、提示模块22和第二无线通讯模块24, mcu23通过第二无线通讯模块24和第一无线通讯模块107配合实现与控制器10的通信连接。
43.工作时,当控制器10根据图像信息判断存在障碍物且判断障碍物不可避让时,输出遥控指令,并通过第一无线通讯模块107和第二无线通讯模块24传输至mcu23;mcu23用于接收遥控指令控制所述提示模块22输出提示信息,工作人员接到提示信息后,可通过遥控器2上的控制按键21输出相应的控制指令,控制机器人本体1动作,完成运输。本实施例中,
提示模块22为蜂鸣器,第一无线通讯模块107和第二无线通讯模块24均为4g无线通讯模块。
44.为了便于对转运机器人的检修,在转运机器人上还设置有机械解锁模块,机械解锁模块与控制器10连接,人脸识别无法打开时,可通过机械解锁模块输入开锁指令启动转运机器人,为转运机器人的检修进一步提供了保障。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1