一种大扭转刚度连续体关节的制作方法
1.本发明涉及连续体关节技术领域,特别是涉及一种大扭转刚度连续体关节。
背景技术:
2.连续体机器人一般由多个连续体关节组成,每个关节包含一根中央脊柱、三或四根平行排列的驱动丝和数量不等的约束盘,通过改变驱动丝长度实现两个自由度的弯曲。中央脊柱通常为细长的镍钛合金杆,由于镍钛合金材料难以加工的特性,中央脊柱与约束盘之间难以建立周向限位,也因此连续体机关节通常不具备大的扭转刚度。这一特性大大限制了连续体机器人的负载能力,使得连续体机器人应用场景较为狭窄。
3.因此,人们试图对上述技术方案进行改进,英国诺丁汉大学的dong等人发表在journalofmechanismsandrobotics的论文“anovelcontinuumrobot usingtwin-pivotcompliantjoints:design,modeling,andvalidation”中设计了一种双枢轴结构连续体关节,通过每两个约束盘之间设计对称分布的双枢轴来强化扭转方向的刚度,并通过双枢轴平面的正交分布保证了连续体关节的两个自由度不受限制。
4.但是这种方案中由于各小段之间的双枢轴不是一个整体,这使得连续体机器人的运动学模型较为复杂,控制难度极大。此外由于机械结构与运动学模型的耦合性高,因此机械精度要求极高,导致这种方案难以普及。
技术实现要素:
5.本发明的目的是提供一种大扭转刚度连续体关节,以解决上述现有技术存在的问题,在不影响镍钛合金杆弯曲特性的前提下实现了扭转刚度的提升,同时还提升了连续体机器人的负载能力。
6.为实现上述目的,本发明提供了如下方案:本发明提供一种大扭转刚度连续体关节,包括
7.中央脊柱,所述中央脊柱的第一端和第二端分别安装有第一端面盘和第二端面盘;以及
8.内侧盘,所述中央脊柱上等间距安装有多个所述内侧盘;以及
9.波纹管,所述中央脊柱套设在所述波纹管的内腔中,且所述内侧盘的外径与所述波纹管的内径装配连接;以及
10.外侧盘,所述波纹管的外侧与所述内侧盘对应的位置安装有所述外侧盘;以及
11.驱动丝,所述波纹管的外周周向均布有多条平行排列的所述驱动丝,所述驱动丝的第一端固定在所述第二端面盘上,所述驱动丝的第二端依次穿过各所述外侧盘上预留的过孔和所述第一端面盘上预留的过孔后引出并连接到驱动装置上;所述驱动装置用于改变所述第一端面盘与第二端面盘之间各驱动丝的长度从而实现连续体关节的动作。
12.在其中一个实施例中,所述内侧盘的外径与所述波纹管的内径呈间隙配合方式装配连接。
13.在其中一个实施例中,所述驱动丝的数量为三条,三条所述驱动丝呈周向间隔120
°
分布。
14.在其中一个实施例中,所述驱动丝的数量为四条,四条所述驱动丝呈周向间隔90
°
分布。
15.在其中一个实施例中,所述中央脊柱的第一端以及所述第一端面盘根据连续体机器人的构型设计需求固定在基座上或固定在前一段连续体关节的末端。
16.在其中一个实施例中,所述前一段连续体关节还包括有线管,所述线管的两端分别固定在所述前一段连续体关节的第一端面盘与第二端面盘上。
17.在其中一个实施例中,所述驱动丝的第二端依次穿过本连续体关节的各外侧盘和第一端面盘上预留的过孔并引出后需穿过所述前一段连续体关节的线管再与所述驱动装置连接。
18.在其中一个实施例中,可根据连续体机器人的构型设计需求在所述第一端面盘、第二端面盘和外侧盘上开设不同半径、不同分布数量的过孔。
19.本发明相对于现有技术取得了以下有益技术效果:
20.本发明中的大扭转刚度连续体关节,包括中央脊柱、内侧盘、波纹管、外侧盘和驱动丝,数量不等的内侧盘依次按照一定间距固定在中央脊柱上;中央脊柱套在波纹管的中空部分;内侧盘直径与波纹管中空部分内径连接;波纹管的两个端面分别与第一端面盘与第二端面盘固定;平行排列的驱动丝一端按照周向间隔固定在第二端面盘,另一端依次穿过外侧盘上对应的过孔,驱动丝可通过任意驱动装置改变第一端面盘与第二端面盘的长度从而驱动该连续体关节。本发明通过在中央脊柱周围增加波纹管结构,将外侧盘固定在波纹管上代替了外侧盘直接固定在中央脊柱,此外在波纹管内部增加内侧盘这一结构,通过内侧盘与波纹管的间隙配合保证了中央脊柱与波纹管在任意状态下的同轴关系。本发明利用波纹管这一结构显著提高了连续体关节的扭转刚度,提升了连续体机器人的负载能力。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
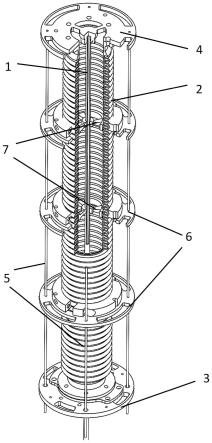
22.图1为本发明实施例中大扭转刚度连续体关节的整体结构示意图;
23.图2为实施例二中两个连续体关节的安装示意图;
24.其中,1中央脊柱;2波纹管;3第一端面盘;4第二端面盘;5驱动丝;6外侧盘;7内侧盘;1-2波纹管;1-3第一端面盘;1-4第二端面盘;1-5驱动丝;1-6外侧盘;1-8线管;2-2波纹管;2-3第一端面盘;2-4第二端面盘;2-5驱动丝;2-6外侧盘。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
26.本发明的目的是提供一种大扭转刚度连续体关节,以解决上述现有技术存在的问题,在不影响镍钛合金杆弯曲特性的前提下实现了扭转刚度的提升,同时还提升了连续体机器人的负载能力。
27.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
28.实施例一
29.如图1所示,本实施例提供一种大扭转刚度连续体关节,包括
30.中央脊柱1,中央脊柱1的第一端和第二端分别安装有第一端面盘3和第二端面盘4;以及
31.内侧盘7,中央脊柱1上等间距安装有多个内侧盘7;以及
32.波纹管2,中央脊柱1套设在波纹管2的内腔中,且内侧盘7的外径与波纹管2的内径装配连接;以及
33.外侧盘6,波纹管2的外侧与内侧盘7对应的位置安装有外侧盘6;以及
34.驱动丝5,波纹管2的外周周向均布有多条平行排列的驱动丝5,驱动丝5的第一端固定在第二端面盘4上,驱动丝5的第二端依次穿过各外侧盘6上预留的过孔和第一端面盘3上预留的过孔后引出并连接到驱动装置上;驱动装置用于改变第一端面盘3与第二端面盘4之间各驱动丝5的长度从而实现连续体关节的动作。
35.在其中一个实施例中,内侧盘6的外径与波纹管2的内径呈间隙配合方式装配连接。波纹管2与中央脊柱1之间通过内侧盘7实现间隙配合,使得中央脊柱1与波纹管2在弯曲状态下也能保证同心,在不影响镍钛合金杆弯曲特性的前提下实现了扭转刚度的提升,本发明无需重新建立运动学模型,基本符合等曲率柔性杆模型这一连续体机器人常见运动学模型,降低了控制难度且无需高精度机械零部件。
36.在其中一个实施例中,驱动丝5的数量为三条,三条驱动丝5呈周向间隔120
°
分布。
37.在其中一个实施例中,驱动丝5的数量为四条,四条驱动丝5呈周向间隔90
°
分布。
38.本实施例中,内侧盘6依次按照一定间距固定在中央脊柱1上。内侧盘6与中央脊柱1所组成的构件安装在波纹管2的中空部分,且所有内侧盘6与波纹管2的内侧表面间隙配合。中央脊柱1的末端与第二端面盘4固连,第二端面盘4与波纹管2的端面固连。中央脊柱1的另一末端与第一端面盘3固连,第一段面盘3与波纹管2的另一末端固连。各驱动丝5穿过外侧盘6及第一端面盘3的过孔将另一端引出,固连到任意驱动装置。驱动丝5可通过任意驱动装置改变第一端面盘3与第二端面盘4的长度从而驱动该连续体关节,驱动装置可以采用如电机、气缸、液压缸等。
39.本实施例的连续体关节运行时,驱动装置与第一端面盘3固连在同一基座上,通过驱动装置改变第一端面盘3与第二端面盘4间各驱动丝5的长度,实现两个自由度。且由于波纹管2与第一端面盘3、第二端面盘4分别固连,使得连续体关节的扭转会造成波纹管2的扭转变形,显著提高了连续体关节的扭转刚度。
40.实施例二
41.本实施例中,中央脊柱1的第一端以及第一端面盘3根据连续体机器人的构型设计需求固定在基座上或固定在前一段连续体关节的末端。驱动丝5的第二端依次穿过本连续
体关节的各外侧盘6和第一端面盘3上预留的过孔并引出后需穿过前一段连续体关节的线管再与驱动装置连接。第一端面盘3、第二端面盘4和外侧盘6上可根据连续体机器人的构型设计需求沿不同半径、不同相位分布数量不等的过孔,供第二端面盘4固定的其他连续体关节的驱动丝5穿过。
42.具体地,如图2所示,本实施例为两个实施例一种的连续体关节的串联使用,包括连续体关节一、连续体关节二。连续体关节一包括中央脊柱、波纹管1-2、第一端面盘1-3、第二端面盘1-4、驱动丝1-5、外侧盘1-6、内侧盘、线管1-8。连续体关节二包括中央脊柱、波纹管2-2、第一端面盘2-3、第二端面盘2-4、驱动丝2-5、外侧盘2-6、内侧盘。
43.两个连续体关节的中央脊柱,内侧盘及外侧盘之间的安装方式与实施例一一致,在图2中不再说明。连续体关节一的波纹管1-2安装第二端面盘1-4的端面与连续体关节二的波纹管2-2安装第一端面盘2-3的端面安装在一起。连续体关节一的驱动丝1-5同实施例一中相同,固连在第二端面盘1-4上,并穿过外侧盘1-6及第一端面盘1-3的过孔将另一端引出,固连到驱动装置。但是对于连续体关节二的驱动丝2-5,首先需要参照实施例一,将末端固连在第二端面盘2-4上然后穿过外侧盘2-6及第一端面盘2-3的过孔,此外还需要穿过连续体关节一上的线管1-8引出至驱动装置,其中线管1-8的两端分别固连在连续体关节一的第一端面盘1-3与第二端面盘1-4上,由于驱动装置不会改变线管1-8的长度,因此连续体关节一的运动不会改变线管1-8的长度,因此连续体关节一与连续体关节二的运动得以解耦。基于此实施例,可以实现数量连续体关节的串联。
44.需要说明的是,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
45.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1