一种主被动结合式膝关节外骨骼机器人的制作方法
1.本技术涉及外骨骼技术领域,特别是一种主被动结合式膝关节外骨骼机器人。
背景技术:
2.膝关节外骨骼机器人可以为用户提供活动助力,辅助其上下楼梯和行走。现有的膝关节外骨骼机器人主要有两类,第一类为主动式膝关节外骨骼机器人,通过驱动电机释能;第二类为被动式膝关节外骨骼机器人,通过弹性元件储能和释能。
3.但是,现有的膝关节外骨骼机器人存在以下问题:主动式膝关节外骨骼机器人能量利用效率较低,重量较大,电机利用率较低,并且灵活度较低;被动式膝关节外骨骼机器人助力效果有限。
技术实现要素:
4.鉴于所述问题,提出了本技术以便提供克服所述问题或者至少部分地解决所述问题的一种主被动结合式膝关节外骨骼机器人,包括:
5.一种主被动结合式膝关节外骨骼机器人,包括:腰部结构和连接在所述腰部结构两侧的腿部结构;
6.所述腰部结构包括主动助力组件;所述腿部结构包括膝关节旋转盘和与所述膝关节旋转盘连接的被动助力组件;所述主动助力组件的活动端在第一状态下与第一侧的所述膝关节旋转盘连接并驱动第一侧的所述膝关节旋转盘转动;所述主动助力组件的活动端在第二状态下与第二侧的所述膝关节旋转盘连接并驱动第二侧的所述膝关节旋转盘转动;
7.当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述腰部结构固定在所述用户的腰部位置,所述腿部结构固定在所述用户的腿部位置,其中,所述膝关节旋转盘对应于所述用户的膝关节位置;
8.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘沿第一方向转动,带动对应侧的所述被动助力组件存储弹性势能;
9.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,所述主动助力组件的活动端与对应侧的所述膝关节旋转盘连接并驱动对应侧的所述膝关节旋转盘沿第二方向转动,对应侧的所述被动助力组件释放所述弹性势能,带动对应侧的所述膝关节旋转盘沿所述第二方向转动。
10.优选的,所述腰部结构包括背板和安装在所述背板表面的所述主动助力组件;
11.所述主动助力组件包括电气模块、弹性驱动模块和驱动切换模块;所述电气模块分别与所述弹性驱动模块和所述驱动切换模块电连接;所述弹性驱动模块与所述驱动切换模块的活动端连接并驱动所述驱动切换模块的活动端转动;所述驱动切换模块的活动端沿预设轴向往复运动;所述驱动切换模块的活动端运动至第一位置时与第一侧的所述膝关节旋转盘连接并带动第一侧的所述膝关节旋转盘转动;所述驱动切换模块的活动端运动至第
二位置时与第二侧的所述膝关节旋转盘连接并带动第二侧的所述膝关节旋转盘转动。
12.优选的,所述弹性驱动模块包括驱动电机、电机安装板、弹性驱动器外圈、第一弹性元件和弹性驱动器内圈;
13.所述驱动电机通过所述电机安装板安装在所述背板表面;所述驱动电机的输出轴与所述弹性驱动器外圈连接并带动所述弹性驱动器外圈转动;所述弹性驱动器外圈通过所述第一弹性元件与所述弹性驱动器内圈连接并带动所述弹性驱动器内圈转动;所述弹性驱动器内圈与所述驱动切换模块的活动端连接并带动所述驱动切换模块的活动端转动。
14.优选的,所述弹性驱动模块还包括编码器齿轮和编码器;
15.所述编码器安装在所述电机安装板表面;所述弹性驱动器内圈上的齿轮与所述编码器齿轮啮合;所述编码器齿轮与所述编码器的输入轴连接并带动所述编码器的输入轴转动。
16.优选的,所述驱动切换模块包括第一传动绳、第一驱动轮、移动啮合块、主轴、第二驱动轮、第二传动绳、舵机安装支架、舵机、舵机齿轮、操纵块、微型直线滑轨和滑轨安装支架;
17.所述第一传动绳一端绕设在所述第一驱动轮上,另一端绕设在第一侧的所述膝关节旋转盘上;所述第二传动绳一端绕设在所述第二驱动轮上,另一端绕设在第二侧的所述膝关节旋转盘上;
18.所述弹性驱动器内圈与所述主轴连接并带动所述主轴转动;所述主轴与所述移动啮合块连接并带动所述移动啮合块转动;所述舵机通过所述舵机安装支架安装在所述背板表面;所述舵机的输出轴与所述舵机齿轮连接并带动所述舵机齿轮转动;所述微型直线滑轨通过所述滑轨安装支架安装在所述背板表面;所述操纵块滑动设置在所述微型直线滑轨内部;所述舵机齿轮与所述操纵块上的齿条结构啮合;所述操纵块与所述移动啮合块连接并带动所述移动啮合块沿所述主轴的轴向往复运动;所述移动啮合块运动至所述第一位置时与所述第一驱动轮连接并带动所述第一驱动轮转动;所述移动啮合块运动至所述第二位置时与所述第二驱动轮连接并带动所述第二驱动轮转动。
19.优选的,所述弹性驱动器内圈的中心位置设有第一d型槽;所述主轴的端部设有第一d型轴;所述第一d型轴插设在所述第一d型槽的内部;所述移动啮合块的中心位置设有第二d型槽;所述主轴的中间位置设有第二d型轴;所述第二d型轴插设在所述第二d型槽的内部;所述移动啮合块与所述第二d型轴滑动连接。
20.优选的,所述移动啮合块的两端面均设有啮合齿结构;所述第一驱动轮和所述第二驱动轮朝向所述移动啮合块的端面均设有啮合齿适配结构;所述移动啮合块运动至所述第一位置时,所述移动啮合块第一侧的所述啮合齿结构与所述第一驱动轮的所述啮合齿适配结构嵌合连接;所述移动啮合块运动至所述第二位置时,所述移动啮合块第二侧的所述啮合齿结构与所述第二驱动轮的所述啮合齿适配结构嵌合连接。
21.优选的,所述腿部结构包括大腿模块、小腿模块、所述膝关节旋转盘和所述被动助力组件;
22.所述被动助力组件安装在所述大腿模块表面;所述膝关节旋转盘固定在所述小腿模块的端部;所述膝关节旋转盘与所述大腿模块转动连接;
23.当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述大腿模块固定在所述
用户的大腿位置,所述小腿模块固定在所述用户的小腿位置。
24.优选的,所述被动助力组件包括第三传动绳、螺纹轴承、轴承座、第二弹性元件、滑块、导向套筒和预紧力调节组件;
25.所述导向套筒安装在所述大腿模块表面;所述滑块滑动设置在所述导向套筒内部;所述预紧力调节组件安装在所述大腿模块表面;所述第二弹性元件一端与所述滑块连接,另一端与所述预紧力调节组件连接;所述螺纹轴承通过所述轴承座安装在所述大腿模块表面;所述第三传动绳一端与所述滑块连接,另一端经过所述螺纹轴承与所述膝关节旋转盘连接;
26.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘沿所述第一方向转动,通过对应侧的所述第三传动绳和所述滑块带动对应侧的所述第二弹性元件存储弹性势能;当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,对应侧的所述第二弹性元件释放所述弹性势能,通过对应侧的所述滑块和所述第三传动绳带动对应侧的所述膝关节旋转盘沿所述第二方向转动。
27.优选的,所述预紧力调节组件包括调节电机、锥齿轮、安装座盖、锥齿轮丝杠、调节电机安装座、丝杠顶块、导向块、丝杠支承座和移动块;
28.所述调节电机通过所述安装座盖和所述调节电机安装座安装在所述大腿模块表面;所述调节电机的输出轴与所述锥齿轮连接并带动所述锥齿轮转动;所述锥齿轮丝杠通过所述丝杠顶块和所述丝杠支承座安装在所述大腿模块表面;所述锥齿轮与所述锥齿轮丝杠啮合;所述导向块安装在所述大腿模块表面;所述移动块与所述导向块滑动连接;所述锥齿轮丝杠与所述移动块连接并带动所述移动块沿所述移动块的轴向往复运动;所述移动块与所述第二弹性元件的端部连接。
29.本技术具有以下优点:
30.在本技术的实施例中,相对于现有技术中的主动式膝关节外骨骼机器人能量利用效率较低,重量较大且电机利用率较低和被动式膝关节外骨骼机器人助力效果有限的问题,本技术提供了主被动结合式设计和欠驱动的主动助力组件的解决方案,具体为:“一种主被动结合式膝关节外骨骼机器人,包括:腰部结构和连接在所述腰部结构两侧的腿部结构;所述腰部结构包括主动助力组件;所述腿部结构包括膝关节旋转盘和与所述膝关节旋转盘连接的被动助力组件;所述主动助力组件的活动端在第一状态下与第一侧的所述膝关节旋转盘连接并驱动第一侧的所述膝关节旋转盘转动;所述主动助力组件的活动端在第二状态下与第二侧的所述膝关节旋转盘连接并驱动第二侧的所述膝关节旋转盘转动;当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述腰部结构固定在所述用户的腰部位置,所述腿部结构固定在所述用户的腿部位置,其中,所述膝关节旋转盘对应于所述用户的膝关节位置;当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘沿第一方向转动,带动对应侧的所述被动助力组件存储弹性势能;当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,所述主动助力组件的活动端与对应侧的所述膝关节旋转盘连接并驱动对应侧的所述膝关节旋转盘沿第二方向转动,对应侧的所述被动助力组件释放所述弹性势能,带动对应侧的所述膝关节旋转盘沿所述第二方向转动”。通过采用主被动结合式的设计,提高了膝关节
外骨骼机器人在不同情景下的能量利用效率和辅助效果;通过使用欠驱动的主动助力组件,减少了驱动电机的使用数量,提高了驱动电机的使用率,降低了整机重量。
附图说明
31.为了更清楚地说明本技术的技术方案,下面将对本技术的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
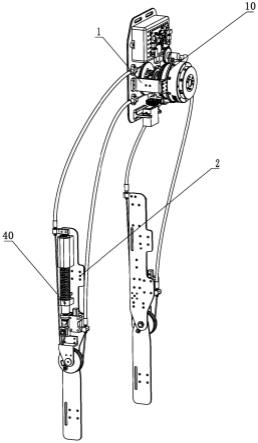
32.图1是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人的结构示意图;
33.图2是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中腰部结构的结构示意图;
34.图3是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中弹性驱动模块的结构示意图;
35.图4是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中驱动切换模块的结构示意图;
36.图5是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中弹性驱动模块和驱动切换模块在第一状态下的结构示意图;
37.图6是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中弹性驱动模块和驱动切换模块在第二状态下的结构示意图;
38.图7是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中腿部结构的结构示意图;
39.图8是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中被动助力组件的结构示意图;
40.图9是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中被动助力组件的助力过程示意图;
41.图10是本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人中第二弹性元件的预紧力调节过程示意图。
42.说明书附图中的附图标记如下:
43.1腰部结构;10主动助力组件;11电气模块;12弹性驱动模块;121驱动电机;122电机安装板;123弹性驱动器外圈;124第一弹性元件;125弹性驱动器内圈;126编码器齿轮;127编码器;13驱动切换模块;131第一传动绳;132第一驱动轮;133移动啮合块;134主轴;135第二驱动轮;136第二传动绳;137舵机安装支架;138舵机;139舵机齿轮;1310操纵块;1311微型直线滑轨;1312滑轨安装支架;14背板;2腿部结构;21大腿模块;22膝关节旋转盘;23小腿模块;40被动助力组件;41第三传动绳;42调节电机;43锥齿轮;44安装座盖;45锥齿轮丝杠;46螺纹轴承;47轴承座;48调节电机安装座;49丝杠顶块;410导向块;411丝杠支承座;412移动块;413第二弹性元件;414滑块;415导向套筒。
具体实施方式
44.为使本技术的所述目的、特征和优点能够更加明显易懂,下面结合附图和具体实
施方式对本技术做进一步详细的说明。显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
45.发明人通过分析现有技术发现,现有的主动式膝关节外骨骼机器人,在下楼梯这类人体膝关节主要做负功的情景中无法搜集并利用人体重力势能,反而需要消耗电能做负功以实现缓冲作用,造成能量利用效率较低;每一个关节配置一个驱动电机,造成多关节外骨骼机器人整机重量较大;在步态周期中,每个关节的驱动电机往往只工作一部分时间,其余时间处于非工作状态,造成电机利用率较低;关节与驱动电机之间通过连杆、第三传动绳等零件连接,关节与驱动电机的运动关系不可更改,造成外骨骼机器人缺少灵活性。并且,现有的被动式膝关节外骨骼机器人只能存储并释放人体自身的能量,无法在上楼梯这类人体膝关节主要做正功的情景中提供额外助力,造成助力效果有限。
46.参照图1,示出了本技术一实施例提供的一种主被动结合式膝关节外骨骼机器人,包括:腰部结构1和连接在所述腰部结构1两侧的腿部结构2;
47.所述腰部结构1包括主动助力组件10;所述腿部结构2包括膝关节旋转盘22和与所述膝关节旋转盘22连接的被动助力组件40;所述主动助力组件10的活动端在第一状态下与第一侧的所述膝关节旋转盘22连接并驱动第一侧的所述膝关节旋转盘22转动;所述主动助力组件10的活动端在第二状态下与第二侧的所述膝关节旋转盘22连接并驱动第二侧的所述膝关节旋转盘22转动;
48.当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述腰部结构1固定在所述用户的腰部位置,所述腿部结构2固定在所述用户的腿部位置,其中,所述膝关节旋转盘22对应于所述用户的膝关节位置;
49.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘22沿第一方向转动,带动对应侧的所述被动助力组件40存储弹性势能;
50.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,所述主动助力组件10的活动端与对应侧的所述膝关节旋转盘22连接并驱动对应侧的所述膝关节旋转盘22沿第二方向转动,对应侧的所述被动助力组件40释放所述弹性势能,带动对应侧的所述膝关节旋转盘22沿所述第二方向转动。
51.在本技术的实施例中,相对于现有技术中的主动式膝关节外骨骼机器人能量利用效率较低,重量较大且电机利用率较低和被动式膝关节外骨骼机器人助力效果有限的问题,本技术提供了主被动结合式设计和欠驱动的主动助力组件10的解决方案,具体为:“一种主被动结合式膝关节外骨骼机器人,包括:腰部结构1和连接在所述腰部结构1两侧的腿部结构2;所述腰部结构1包括主动助力组件10;所述腿部结构2包括膝关节旋转盘22和与所述膝关节旋转盘22连接的被动助力组件40;所述主动助力组件10的活动端在第一状态下与第一侧的所述膝关节旋转盘22连接并驱动第一侧的所述膝关节旋转盘22转动;所述主动助力组件10的活动端在第二状态下与第二侧的所述膝关节旋转盘22连接并驱动第二侧的所述膝关节旋转盘22转动;当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述腰部结构1固定在所述用户的腰部位置,所述腿部结构2固定在所述用户的腿部位置,其中,所述膝关节旋转盘22对应于所述用户的膝关节位置;当穿戴有所述主被动结合式膝关节外骨骼
机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘22沿第一方向转动,带动对应侧的所述被动助力组件40存储弹性势能;当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,所述主动助力组件10的活动端与对应侧的所述膝关节旋转盘22连接并驱动对应侧的所述膝关节旋转盘22沿第二方向转动,对应侧的所述被动助力组件40释放所述弹性势能,带动对应侧的所述膝关节旋转盘22沿所述第二方向转动”。通过采用主被动结合式的设计,提高了膝关节外骨骼机器人在不同情景下的能量利用效率和辅助效果(具体的,当所述用户腿部弯曲时,所述被动助力组件40可以提供缓冲作用,减轻所述用户的膝关节受到的冲击;当所述用户腿部舒张时,所述主动助力组件10和所述被动助力组件40可以提供充分的助力作用,使得所述用户的腿部更加省力);通过使用欠驱动的所述主动助力组件10,减少了驱动电机121的使用数量,提高了驱动电机121的使用率,降低了整机重量。
52.下面,将对本示例性实施例中一种主被动结合式膝关节外骨骼机器人做进一步地说明。
53.参照图2,本实施例中,所述腰部结构1包括背板14和安装在所述背板14表面的所述主动助力组件10;
54.所述主动助力组件10包括电气模块11、弹性驱动模块12和驱动切换模块13;所述电气模块11分别与所述弹性驱动模块12和所述驱动切换模块13电连接;所述弹性驱动模块12与所述驱动切换模块13的活动端连接并驱动所述驱动切换模块13的活动端转动;所述驱动切换模块13的活动端沿预设轴向往复运动;所述驱动切换模块13的活动端运动至第一位置时与第一侧的所述膝关节旋转盘22连接并带动第一侧的所述膝关节旋转盘22转动;所述驱动切换模块13的活动端运动至第二位置时与第二侧的所述膝关节旋转盘22连接并带动第二侧的所述膝关节旋转盘22转动。
55.参照图3,本实施例中,所述弹性驱动模块12包括驱动电机121、电机安装板122、弹性驱动器外圈123、第一弹性元件124和弹性驱动器内圈125;
56.所述驱动电机121通过所述电机安装板122安装在所述背板14表面;所述驱动电机121的输出轴与所述弹性驱动器外圈123连接并带动所述弹性驱动器外圈123转动;所述弹性驱动器外圈123通过所述第一弹性元件124与所述弹性驱动器内圈125连接并带动所述弹性驱动器内圈125转动;所述弹性驱动器内圈125与所述驱动切换模块13的活动端连接并带动所述驱动切换模块13的活动端转动。
57.具体的,所述第一弹性元件124为弹力绳、扭簧、碟簧或其它弹性元件。通过在所述弹性驱动器外圈123和所述弹性驱动器内圈125之间设置所述第一弹性元件124,使得所述驱动电机121可以弹性输出力矩,提高了所述主被动结合式膝关节外骨骼机器人的灵活性,可以为所述用户提供更加柔顺的助力。
58.本实施例中,所述弹性驱动模块12还包括编码器齿轮126和编码器127;
59.所述编码器127安装在所述电机安装板122表面;所述弹性驱动器内圈125上的齿轮与所述编码器齿轮126啮合;所述编码器齿轮126与所述编码器127的输入轴连接并带动所述编码器127的输入轴转动。所述编码器127用于采集所述弹性驱动器内圈125的输出角度信息。
60.参照图4-6,本实施例中,所述驱动切换模块13包括第一传动绳131、第一驱动轮
132、移动啮合块133、主轴134、第二驱动轮135、第二传动绳136、舵机安装支架137、舵机138、舵机齿轮139、操纵块1310、微型直线滑轨1311和滑轨安装支架1312;
61.所述第一传动绳131一端绕设在所述第一驱动轮132上,另一端绕设在第一侧的所述膝关节旋转盘22上;所述第二传动绳136一端绕设在所述第二驱动轮135上,另一端绕设在第二侧的所述膝关节旋转盘22上;
62.所述弹性驱动器内圈125与所述主轴134连接并带动所述主轴134转动;所述主轴134与所述移动啮合块133连接并带动所述移动啮合块133转动;所述舵机138通过所述舵机安装支架137安装在所述背板14表面;所述舵机138的输出轴与所述舵机齿轮139连接并带动所述舵机齿轮139转动;所述微型直线滑轨1311通过所述滑轨安装支架1312安装在所述背板14表面;所述操纵块1310滑动设置在所述微型直线滑轨1311内部;所述舵机齿轮139与所述操纵块1310上的齿条结构啮合;所述操纵块1310与所述移动啮合块133连接并带动所述移动啮合块133沿所述主轴134的轴向往复运动;所述移动啮合块133运动至所述第一位置时与所述第一驱动轮132连接并带动所述第一驱动轮132转动;所述移动啮合块133运动至所述第二位置时与所述第二驱动轮135连接并带动所述第二驱动轮135转动。
63.通过设置所述舵机138和所述舵机齿轮139,可以实现对所述操纵块1310的移动控制。在其他实施例中,还可以采用电机丝杠结构实现对所述操纵块1310的移动控制。
64.本实施例中,所述弹性驱动器内圈125的中心位置设有第一d型槽;所述主轴134的端部设有第一d型轴;所述第一d型轴插设在所述第一d型槽的内部;所述移动啮合块133的中心位置设有第二d型槽;所述主轴134的中间位置设有第二d型轴;所述第二d型轴插设在所述第二d型槽的内部;所述移动啮合块133与所述第二d型轴滑动连接。
65.所述主轴134通过所述第一d型轴和所述第一d型槽与所述弹性驱动器内圈125连接,可以准确获取所述弹性驱动模块12的输出转矩。所述移动啮合块133通过所述第二d型轴和所述第二d型槽与所述主轴134连接,可以通过所述主轴134准确获取所述弹性驱动模块12的输出转矩。
66.本实施例中,所述移动啮合块133的两端面均设有啮合齿结构;所述第一驱动轮132和所述第二驱动轮135朝向所述移动啮合块133的端面均设有啮合齿适配结构;所述移动啮合块133运动至所述第一位置时,所述移动啮合块133第一侧的所述啮合齿结构与所述第一驱动轮132的所述啮合齿适配结构嵌合连接;所述移动啮合块133运动至所述第二位置时,所述移动啮合块133第二侧的所述啮合齿结构与所述第二驱动轮135的所述啮合齿适配结构嵌合连接。
67.参照图7,本实施例中,所述腿部结构2包括大腿模块21、小腿模块23、所述膝关节旋转盘22和所述被动助力组件40;
68.所述被动助力组件40安装在所述大腿模块21表面;所述膝关节旋转盘22固定在所述小腿模块23的端部;所述膝关节旋转盘22与所述大腿模块21转动连接;
69.当用户穿戴所述主被动结合式膝关节外骨骼机器人时,所述大腿模块21固定在所述用户的大腿位置,所述小腿模块23固定在所述用户的小腿位置。
70.本实施例中,所述大腿模块21包括大腿连杆和与所述大腿连杆连接的大腿绑带;所述膝关节旋转盘22与所述大腿连杆转动连接;
71.当用户穿戴所述欠驱动膝关节外骨骼机器人时,所述大腿绑带固定在所述用户的
大腿位置。
72.通过设置所述大腿绑带,可以确保所述大腿模块21与所述用户的大腿稳定连接。
73.本实施例中,所述小腿模块23包括小腿连杆和与所述小腿连杆连接的小腿绑带;所述膝关节旋转盘22固定在所述小腿连杆的端部;
74.当用户穿戴所述欠驱动膝关节外骨骼机器人时,所述小腿绑带固定在所述用户的小腿位置。
75.通过设置所述小腿绑带,可以确保所述小腿模块23与所述用户的小腿稳定连接。
76.参照图8-9,本实施例中,所述被动助力组件40包括第三传动绳41、螺纹轴承46、轴承座47、第二弹性元件413、滑块414、导向套筒415和预紧力调节组件;
77.所述导向套筒415安装在所述大腿模块21表面;所述滑块414滑动设置在所述导向套筒415内部;所述预紧力调节组件安装在所述大腿模块21表面;所述第二弹性元件413一端与所述滑块414连接,另一端与所述预紧力调节组件连接;所述螺纹轴承46通过所述轴承座47安装在所述大腿模块21表面;所述第三传动绳41一端与所述滑块414连接,另一端经过所述螺纹轴承46与所述膝关节旋转盘22连接;
78.当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部弯曲时,对应侧的所述膝关节旋转盘22沿所述第一方向转动,通过对应侧的所述第三传动绳41和所述滑块414带动对应侧的所述第二弹性元件413存储弹性势能;当穿戴有所述主被动结合式膝关节外骨骼机器人的所述用户的任一侧腿部舒张时,对应侧的所述第二弹性元件413释放所述弹性势能,通过对应侧的所述滑块414和所述第三传动绳41带动对应侧的所述膝关节旋转盘22沿所述第二方向转动。
79.具体的,所述第二弹性元件413为气簧、碟簧或其它弹性元件。
80.参照图8、10,本实施例中,所述预紧力调节组件包括调节电机42、锥齿轮43、安装座盖44、锥齿轮丝杠45、调节电机安装座48、丝杠顶块49、导向块410、丝杠支承座411和移动块412;
81.所述调节电机42通过所述安装座盖44和所述调节电机安装座48安装在所述大腿模块21表面;所述调节电机42的输出轴与所述锥齿轮43连接并带动所述锥齿轮43转动;所述锥齿轮丝杠45通过所述丝杠顶块49和所述丝杠支承座411安装在所述大腿模块21表面;所述锥齿轮43与所述锥齿轮丝杠45啮合;所述导向块410安装在所述大腿模块21表面;所述移动块412与所述导向块410滑动连接;所述锥齿轮丝杠45与所述移动块412连接并带动所述移动块412沿所述移动块412的轴向往复运动;所述移动块412与所述第二弹性元件413的端部连接。
82.通过设置所述预紧力调节组件,可以调节所述第二弹性元件413的预紧力,使得所述主被动结合式膝关节外骨骼机器人能够在不同情景下具有灵活可变的缓冲和助力效果。
83.尽管已描述了本技术实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术实施例范围的所有变更和修改。
84.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意
在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
85.以上对本技术所提供的一种主被动结合式膝关节外骨骼机器人,进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1