井下多功能辅助作业机械臂的制作方法
1.本发明属于井下多功能作业车辆领域,具体涉及一种井下多功能辅助作业机械臂。
背景技术:
2.随着煤机装备技术的发展,综采装备及回撤装备基本实现了自动化,并逐步向智能化发展,但与之相配套的辅助性环节仍然需要大量的人员辅助作业,尤其是综采工作面设备回撤过程中,小件物料的搬运、钢丝绳牵引、巷道局部修整、浮煤清理等环节,虽然是辅助性工序,但由于费时费力,影响了整个工作面回撤进程,由于没有专用工具及设备,人员不仅劳动强度大,而且存在安全隐患。
3.目前,井下为了完成这些辅助工序,要么采用人海战术,比如为了拖拽钢丝绳,有时需要多达7-8人,要么临时采用其它大型设备,但由于回撤过程中任务较杂,需要不同类型的设备辅助作业,造成多种设备现场协调困难,设备能力极大浪费。
技术实现要素:
4.本发明为了解决井下各项辅助工序没有专用作业车,造成人工投入多、多种设备现场协调困难等问题。
5.本发明提供了如下技术方案:一种井下多功能辅助作业机械臂,机械臂包括依次串接的大臂、伸缩臂、摆动臂、回转式减速机、摆动油缸,大臂的下端与一个大臂回转座铰接,大臂的臂身与大臂回转座之间铰接有悬臂升降驱动缸,三个铰接点呈三角分布;伸缩臂与大臂的内腔滑动插接,伸缩臂与大臂之间连接有伸缩臂驱动缸,伸缩臂上设置有摆动臂驱动缸,摆动臂驱动缸的缸筒与伸缩臂上的支架铰接;摆动臂上具有两个上下布置的铰接轴,其中一个铰接轴与伸缩臂连接、另一铰接轴与摆动臂驱动缸的缸杆连接;回转式减速机安装在摆动臂的动作端,摆动油缸安装在回转式减速机的动作端,回转式减速机的转轴与摆动油缸的转轴垂直;摆动油缸的动作端连接快换装置,机械臂通过快换装置连接不同的作业属具。
6.进一步地,快换装置包括安装架,安装架的一侧与摆动油缸的动作端相连,安装架的另一侧设置有一排开口向上的托钩、一个向下推出的快换油缸,快换油缸的下端连接有插销,插销活动穿插于安装架上的第一销孔中,作业属具上具有执行件安装机构,执行件安装机构上设置有与托钩的位置对应、直径适配的销轴,与第一销孔对齐的第二销孔。
7.进一步地,悬臂升降驱动缸有两根,布置于大臂的臂身两侧。
8.进一步地,作业属具包括铲叉、铲斗、挖斗、抓举机械手以及破碎锤,铲叉、铲斗、挖斗、抓举机械手以及破碎锤上均具有与快换装置适配的执行件安装机构。
9.进一步地,安装架与摆动油缸之间通过环绕摆动油缸的转轴一周均布的螺栓锁紧连接。
10.进一步地,悬臂升降驱动缸、伸缩臂驱动缸、摆动臂驱动缸均是电驱动缸,电驱动
缸包括防爆电机、壳体、丝杠、螺母、活塞杆,活塞杆装配在壳体的腔内,活塞杆的尾端设置螺母,螺母的螺孔与活塞杆内的长孔连通,丝杠与螺母螺纹旋合,丝杠的一端穿入活塞杆内,另一端连接一个从动带轮,防爆电机安装在壳体外,防爆电机的转轴上安装有一个主动带轮,主动带轮与从动带轮之间连接同步带。
11.与现有技术相比,本发明的优势在于:本发明提供的一种井下多功能辅助作业机械臂,具备大臂回转、举升,伸缩臂伸缩,摆动臂折展,作业属具相对摆动臂轴向回转、摆动6个自由度。机械臂相对于多功能辅助作业车可实现
±
90
°
回转,大臂可实现-15
°
~38
°
上下摆动,伸缩臂相对于大臂可实现0~500mm伸缩,摆动臂相对于伸缩臂可实现0
°
~90
°
摆动,作业属具相对摆动臂轴向
±
180
°
回转,
±
90
°
摆动。配备铲叉、铲斗、挖斗、抓举机械手、破碎锤,不同属具之间可实现快速更换,满足综采设备回撤需求辅助作业需求,可完成叉装、铲运、挖掘、抓举、破碎、吊装、浮煤清理等辅助性功能。
附图说明
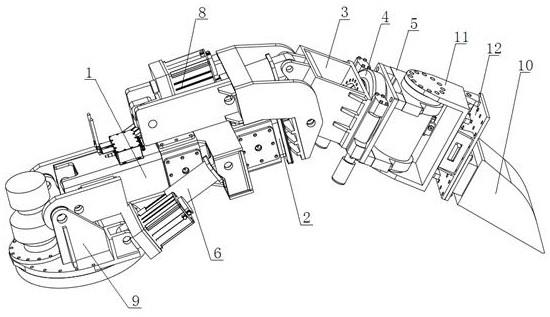
12.图1为机械臂的结构示意图。
13.图2为井下多功能辅助作业车的结构示意图。
14.图3为快换装置和执行件安装机构连接示意图。
15.图4为快换装置的结构示意图。
16.图5为执行件安装机构的结构示意图。
17.图6为电驱动缸的结构示意图。
18.图中:1-大臂;2-伸缩臂;3-摆动臂;4-回转式减速机;5-摆动油缸;6-悬臂升降驱动缸;7-遥控发射器;8-摆动臂驱动缸;9-大臂回转座;10-作业属具;11-快换装置;11.1-安装架;11.2-快换油缸;11.3-托钩;11.4-插销;11.5-第一销孔;12-执行件安装机构;12.1-销轴;12.2-第二销孔;13-多功能辅助作业车;14-电驱动缸;14.1-防爆电机;14.2-壳体;14.3-丝杠;14.4-螺母;14.5-活塞杆;14.6-从动带轮;14.7-主动带轮;14.8-同步带。
具体实施方式
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.如图1所示:一种井下多功能辅助作业机械臂,机械臂包括依次串接的大臂1、伸缩臂2、摆动臂3、回转式减速机4、摆动油缸5,大臂1的下端与一个大臂回转座9铰接,大臂1的臂身与大臂回转座9之间铰接有悬臂升降驱动缸6,三个铰接点呈三角分布;悬臂升降驱动缸6有两根,布置于大臂1的臂身两侧;伸缩臂2与大臂1的内腔滑动插接,伸缩臂2与大臂1之间连接有伸缩臂驱动缸,伸缩臂2上设置有摆动臂驱动缸8,摆动臂驱动缸8的缸筒与伸缩臂2上的支架铰接;摆动臂3上具有两个上下布置的铰接轴,其中一个铰接轴与伸缩臂2连接、另一铰接轴与摆动臂驱动缸8的缸杆连接;回转式减速机4安装在摆动臂3的动作端,摆动油缸5安装在回转式减速机4的动作端,回转式减速机4的转轴与摆动油缸5的转轴垂直;摆动
油缸3.5的动作端连接快换装置11,机械臂通过快换装置11连接不同的作业属具10。
21.作业属具10包括铲叉、铲斗、挖斗、抓举机械手以及破碎锤,铲叉、铲斗、挖斗、抓举机械手以及破碎锤上均具有与快换装置11适配的执行件安装机构。机械臂可完成叉装、铲运、挖掘、抓举、破碎、吊装、浮煤清理等辅助性功能。
22.如图3、图4、图5所示:快换装置11包括安装架11.1,安装架11.1的一侧与摆动油缸5的动作端相连,安装架11.1与摆动油缸5之间通过环绕摆动油缸5的转轴一周均布的螺栓锁紧连接,安装架11.1的另一侧设置有一排开口向上的托钩11.3、一个向下推出的快换油缸11.2,快换油缸11.2的下端连接有插销11.4,插销11.4活动穿插于安装架11.1上的第一销孔11.5中,作业属具10上具有执行件安装机构12,执行件安装机构12上设置有与托钩11.3的位置对应、直径适配的销轴12.1,与第一销孔11.5对齐的第二销孔12.2。
23.如图2所示:机械臂3位于多功能辅助作业车前部,大臂回转座9与多功能辅助作业车的车身相连。
24.如图6所示:悬臂升降驱动缸6、伸缩臂驱动缸、摆动臂驱动缸8均是电驱动缸14,电驱动缸14行程控制精确,电驱动缸14包括防爆电机14.1、壳体14.2、丝杠14.3、螺母14.4、活塞杆14.5,活塞杆14.5装配在壳体14.2的腔内,活塞杆14.5的尾端设置螺母14.4,螺母14.4的螺孔与活塞杆14.5内的长孔连通,丝杠14.3与螺母14.4螺纹旋合,丝杠14.3的一端穿入活塞杆14.5内,另一端连接一个从动带轮14.6,防爆电机14.1安装在壳体14.2外,防爆电机14.1的转轴上安装有一个主动带轮14.7,主动带轮14.7与从动带轮14.6之间连接同步带14.8。
25.本实施例的机械臂配备接收器和遥控发射器,遥控发射器通过遥控电池供电,并且具备一定数据存储容量的数据存储功能。
26.遥控发射器通过无线将数据传输到遥控接收机模块,接收机将数据接受后经过处理,转换成can协议信号,与plc的通讯模块进行通讯,再由plc进行信号处理,并执行到末端机构。末端机构将执行情况反馈回plc,plc通过原路径反馈到遥控器,直观反应设备的工作状态。控制过程中对遥控发射器发出的信号数据进行卡尔曼滤波处理,降低干扰,对现有的噪声等干扰进行过滤处理,再基于估计值和已知外部影响校正后获得新估计值,将原不确定性和外部环境的不确定性综合预测新不确定性。
27.机械臂具备一键折叠功能,遥控发出一键折叠指令后,经过plc处理,按照程序预定设计,进行自动收回机械臂至可行走状态,防止机身干涉。
28.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1