一种变体式线控机器人及其线控方法与流程
1.本发明属于线控机器人的技术领域,特别是涉及一种变体式线控机器人及其线控方法。
背景技术:
2.随着科技的发展与生产需求,在指定空间内完成工件吊装的占比越来越重。但是因工件吊装采用的是线控操作,需要在空间内布置足够长的执行线,并通过控制执行线相互之间的长度来完成位置转移。也正因此,执行线在操作时对空间的需求较高,一旦出现较高障碍物或者其他影响到执行线的牵引时则将会直接影响到工件吊装的进程。
3.现有技术中也有通过将指定空间进行区域划分,并将执行线和对应的线控控制器设置在最小单元内,然后通过最小单元在各个区域内进行移动或者切换以完成最终需要的位置转移。但是这样的设备布置工件多、成本高;且在多个区域内进行移动或者切换时涉及到的是整个最小单元的移动,工程耗大。
技术实现要素:
4.本发明为解决上述背景技术中存在的技术问题,提供了一种变体式线控机器人及其线控方法。
5.本发明采用以下技术方案来实现:一种变体式线控机器人,设于指定空间内;包括:
6.载体,固定在所述指定空间内的顶部;
7.至少四组线控控制器,固定在所述载体的指定位置处;每组线控控制器的输出轴上均设置有执行线;
8.一级承载件,设于所述载体的下方;所述一级承载件的边缘处设置有至少四组导线组件,所述导线组件具有锁紧功能;
9.二级承载件,设于所述一级承载件的下方;所述执行线的活动端依次穿过对应的导线组件并连接于二级承载件;
10.抓取件,与所述二级承载件的底部固定连接;所述载体与一级承载件为磁性连接时,通过控制一级承载件与二级承载件之间执行线的长度实现对工件的姿态调整;所述一级承载件与二级承载件为磁性连接时,通过控制载体与一级承载件间的执行线长度完成工件在预定轨迹上移动;所述载体、一级承载件和二级承载件均磁性连接时,实现对运动障碍物的避让。
11.在进一步的实施例中,所述载体、一级承载件的内底部均设置有若干组铁芯,每组铁芯上均缠绕有线圈;所述线圈通过电控开关连接于电源;
12.所述二级承载件的顶部为金属材质。
13.在进一步的实施例中,所述连接关系为机械连接,则所述载体、一级承载件的底部均设置有夹具,通过所述夹具实现载体对一级承载件、一级承载件对二级承载件的操作性
连接。
14.在进一步的实施例中,所述导线组件包括:
15.安装板,其一端内嵌于所述一级承载件上;
16.锁紧件,安装在所述安装板的另一端;
17.导向轮,通过万向轴承安装在所述安装板的一端;所述执行线依次穿过锁紧件和导向轮。
18.在进一步的实施例中,所述锁紧件包括:
19.本体,内部为镂空结构;所述本体的两侧面开设有穿线孔;
20.棘轮,弹性可转动的安装在所述本体内;所述棘轮包括啮合部和卡紧部,所述卡紧部具有虎口结构;
21.电动气缸,安装在所述本体外;所述电动气缸的活塞杆穿过本体位于本体内;
22.压紧件,弹性可转动的安装在电动气缸与棘轮之间;所述压紧件同时传动连接于所述电动气缸的活塞杆;所述压紧件在靠近棘轮的一侧设有一锯齿。
23.基于如上所述的变体式线控机器人的线控方法,至少包括以下步骤:
24.预先创建移动调控模式和姿态调控模式:若抓取件需要按照指定姿态在指定空间内完成三维移动,则优先进入姿态调控模式,将所述抓取件的姿态调整为指定姿态,随后进入移动调控模式完成三维移动;
25.反之,抓取件在三维移动时无姿态需求,则指定空间内的路况获取抓取件的最佳转移姿态,姿态调控模式基于最佳转移姿态进行调整,随后进入移动调控模式完成三维移动。
26.在进一步的实施例中,还包括:创建避让模式:在执行移动调控模式时,若出现临时障碍物,则基于临时障碍物的属性选择最佳的避让模式;所述避让模式至少包括:吸附避让模式、路线避让模式和姿态避让模式中的一种或几种。
27.在进一步的实施例中,所述移动调控模式的工作流程如下:
28.基于指定姿态或最佳转移姿态完成对抓取件的姿态调整后,锁紧件对执行线进行锁紧固定,保证线控控制器不会作用于一级承载件与二级承载件之间的执行线的长度;
29.每组线控控制器分别调控对应的执行线在载体与第一承载件之间的长度实现第一承载件、第二承载件以及抓取件的位置移动。
30.在进一步的实施例中,所述姿态调整模式的工作流程如下:
31.控制电控开关,使载体内的线圈通电产生磁性,载体对一级承载件开始磁性吸附直至一级承载件被固定在载体的底部;锁紧件对执行线无外力作用;
32.每组线控控制器分别调控对应的执行线在一级承载件和二级承载件之间的长度,对抓取件实现姿态调整,当抓取件的姿态符合所需的指定姿态或最佳转移姿态时,锁紧件对执行线夹紧,保证执行线在一级承载件和二级承载件之间的长度不会再发生改变。
33.在进一步的实施例中,所述吸附避让模式的实现方式如下:控制电控开关,使载体和一级承载件内的线圈通电并产生磁性,则载体对一级承载件进行吸附,一级承载件对二级承载件进行吸附;
34.所述路线避让模式的实现方式如下:更新预定路径得到避让路径,基于避让路径再次进入移动调控模式;
35.所述姿态避让模式的实现方式如下:获取所需的避让姿势,基于避让姿势进入姿态调控模式。
36.本发明的有益效果:本发明不同于现有技术中的线控布置,仅需在指定空间内安装一个具有磁性的大型载体和基本的线控电控装置便可完成抓取件及工件在空间上的位置移动,不仅仅节约了成本同时还可高效转移。同时通过增加了一级承载件和二级承载件,以及两者之间的相互作用便可仅通过调整对应位置处的执行线的长度,实现姿态的调整;简单且操作性强。
附图说明
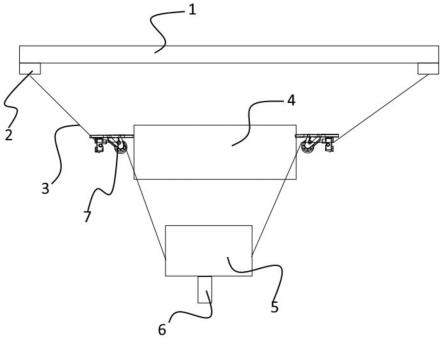
37.图1为一种变体式线控机器人的状态图一。
38.图2为实施例1中的导线组件的侧视图。
39.图3为实施例1中的锁紧件的结构示意图。
40.图4为变体式线控机器人的状态图二。
41.图5为变体式线控机器人的状态图三。
42.图6为变体式线控机器人的状态图四。
43.图1至图6中的各标注为:载体1、线控控制器2、执行线3、一级承载件4、二级承载件5、抓取件6、导线组件7、安装板701、导向轮702、本体703、穿线孔704、啮合部705、卡紧部706、活塞杆707、压紧件708、扭簧709。
具体实施方式
44.下面结合说明书附图和实施例对本发明做进一步的描述和说明。
45.实施例1
46.为了简化现有的线控吊装,同时满足工程上所需的位置转移和姿态调整,本实施例公开了一种变体式线控机器人,如图1所示。将所述变体式线控机器人设置在指定空间内,在本实施例中,指定空间为仓库或者其他立体的存储空间。
47.所述线控机器人包括:固定在指定空间内顶部的载体1,进一步的,载体1为一大型的壳体,其底面为光滑的平面供第一载体1在吸附必要时可移动。载体1的指定位置处阵列有至少一组线控控制器2,在本实施例中线控控制器2采用现有的即可,用于实现放出的执行线3的长度的调控,因此,每组线控控制器2的输出轴上均设置有执行线3,故在此不再赘述。对应的,载体1的下方设置有一级承载件4,一级承载件4的边缘处设置有至少一组导线组件7,所述导线组件7具有锁紧功能。一级承载件4的下方设置有二级承载件5,故执行线3的活动端依次穿过对应的导线组件7并连接于二级承载件5。以四组线控控制器2为例,对称安装在载体1的四个顶角处,执行线3的固定端固定在线控控制器2的输出中上。则对应的,导线组件7同样设置有四组,分别安装在一级承载件4的边缘处。
48.为了确保工件被正常的抓取,故二级承载件5的底部固定有抓取件6,即抓取件6相对二级承载件5为静止状态,因此在下文工件的姿态也是抓取件6的姿态,同样也是二级承载件5的姿态。以抓取件6为夹爪为例。
49.在本实施例中,通过以下技术实现变体式:必要时,载体1对一级承载件4存在连接关系,一级承载件4对二级承载件5存在连接关系。载体1与一级承载件4存在连接关系时,通
过控制一级承载件4与二级承载件5之间执行线3的长度实现对工件的姿态调整。一级承载件4与二级承载件5存在连接关系时,通过控制载体1与一级承载件4间的执行线3长度完成工件在预定轨迹上移动;所述载体1、一级承载件4和二级承载件5均存在连接关系时,实现对运动障碍物的避让。此处的连接关系为操作性连接,即仅需要有连接关系时才会有连接关系。故,可以通过多种形式实现,如磁性连接、机械式连接等等。
50.以通过磁性实现操作性连接为例:所述载体1、一级承载件4的内底部均设置有若干组铁芯,每组铁芯上均缠绕有线圈;所述线圈通过电控开关连接于电源;且一级承载件4和二级承载件5的顶部为金属材质。具体的,当线圈通电后对应的铁芯将会具有磁性,其金属材质的物体进行磁性吸附。当载体1内的线圈通电后,载体1具有磁性,因一级承载件4的顶部为金属材质,一级承载件4在磁力的作用下向上移动直至贴合在载体1上。同样的若一级承载件4的线圈通电后,一级承载件4的具有磁性,因二级承载件5的顶部为金属材质,二级承载件5在磁力的作用下向上移动直至贴合在载体1上。
51.在另一个实施例中,以机械连接为例:则所述载体、一级承载件的底部均设置有多自由度的夹具,通过所述多自由度的夹具实现载体对一级承载件、一级承载件对二级承载件的操作性连接。
52.在本实施例中,将执行线3分为两个部分,一部分是位于载体1与一级承载件4支架的长度,还有一部分是位于一级承载件4与二级承载件5之间的,故调节不同部分的执行线3对应的长度产生的效果是不一样的。因此,为了能够实现对两个部分的执行线3的独立调控,在本实施例中,导线组件7包括:一端内嵌在一级承载件4上的安装板701,从安装板701的一端至另一端分别安装有导向轮702和锁紧件。执行线3依次穿过锁紧件和导向轮702。其中导向轮702通过万向轴承安装在安装板701上,即通过万向轴承实现导向轮702的360
°
转动,满足执行线3在操作时的方向需求。因此当需要将执行线3的两部分做明确分隔时,通过锁紧件将当前的执行件固定作为分隔点。举例说明:现执行线3的活动端从线控控制器2伸出,并依次穿过锁紧件、导向轮702连接于二级承载件5。当前需要调整执行线3从载体1至二级承载件5之间的长度,则锁紧件对执行线3无力的作用。若当前需要调整执行线3从载体1至一级承载件4之间的长度,即不影响一级承载件4与二级承载件5之间的长度,故需要先通过锁紧件将执行线3进行夹紧分隔,保证一级承载件4与二级承载件5之间的长度不受影响。
53.在进一步的实施例中,对锁紧件进行举例说明:如图3所示,锁紧件包括:固定在安装板701上的本体703,其内部为镂空结构。在本体703的两侧面开设有穿线孔704,此处的两侧面均为导向轮702的对立面,即穿线孔704适用于给执行线3提供穿线空间。
54.本体703通过扭簧709安装有可转动的棘轮和压紧件708,其中压紧轮与压紧件708为相邻设置,此处的压紧轮可以为棘轮。并在压紧件708所在的外端面上安装有驱动件。在本实施例中,所述驱动件可使用电动气缸,电动气缸的活塞杆707穿过本体703位于本体703内,并与压紧件708的活动端传动连接。如图所示,棘轮包括啮合部705和卡紧部706,即啮合部705上具有多个锯齿结构,所述卡紧部706具有虎口结构。对应的,压紧件708在靠近棘轮的一侧设有一锯齿。
55.锁紧件的工作原理如下:执行线3依次穿过两个侧面的穿线孔704,当执行线3无需被分隔时,则电动气缸的活塞杆707处于压缩状态,压紧件708的活动端远离啮合部705,即压紧件708上的锯齿与啮合部705脱离,虎口结构与执行线3无接触。反正,电动气缸的活塞
杆707处于顶出状态时,则压紧件708的活动端向啮合部705靠近,压紧件708上的锯齿与啮合部705接触并在电动气缸的作用下推动虎口结构向电动气缸所在位置的反方向移动,压紧执行件,并在穿线孔704的作用下产生错位,实现对执行线3的锁紧。
56.实施例2
57.基于实施例1所述的变体式线控机器人,本实施例公开了变体式线控机器人的线控方法,包括以下步骤:
58.预先创建移动调控模式和姿态调控模式:若抓取件6需要按照指定姿态在指定空间内完成三维移动,则优先进入姿态调控模式,将所述抓取件6的姿态调整为指定姿态,随后进入移动调控模式完成三维移动,三维移动包括:位置转移、取、放。换言之,即当工件在位置转移或者取放的过程中,需要按照执行姿态完成,则需要在锁紧件的配合下,优先通过配姿势调控模式完成姿态的需求,再使用锁紧件配合下,通过移动调控模式完成位置转移或者取放。
59.若抓取件6在三维移动时无姿态需求,则指定空间内的路况获取抓取件6的最佳转移姿态,姿态调控模式基于最佳转移姿态进行调整,随后进入移动调控模式完成三维移动。
60.在进一步的实施例中,如图1和图6所示,移动调控模式的工作流程如下:
61.基于指定姿态或最佳转移姿态完成对抓取件6的姿态调整后,锁紧件对执行线3进行锁紧固定,保证线控控制器2不会作用于一级承载件4与二级承载件5之间的执行线3的长度。进一步的,结合实施例1中所述的锁紧件,即此时的电动气缸的活塞杆707处于顶升状态,控制虎口结构压紧并错位位于穿线孔704内的执行线3完成执行线3的两部分分隔。
62.每组线控控制器2分别调控对应的执行线3在载体1与第一承载件之间的长度实现第一承载件、第二承载件以及抓取件6的位置移动。换言之,此时线控控制器2对执行线3的长度调节仅限于载体1与第一承载件之间。而不会影响到第一承载件与第二承载件之间的执行线3的长度,即对第二承载件的姿态不会有改变。
63.在进一步的实施例中,姿态调整模式的工作流程如下:
64.控制电控开关,使载体1内的线圈通电产生磁性,载体1对一级承载件4开始磁性吸附直至一级承载件4被固定在载体1的底部;锁紧件对执行线3无外力作用,如图4所示。
65.首先通过线控控制器2将载体1与一级承载件4之间的执行线3缩紧到刚刚好,则每组线控控制器2分别调控对应的执行线3在一级承载件4和二级承载件5之间的长度,对抓取件6实现姿态调整,当抓取件6的姿态符合所需的指定姿态或最佳转移姿态时,锁紧件对执行线3夹紧,保证执行线3在一级承载件4和二级承载件5之间的长度不会再发生改变,即姿态不会再发生改变。
66.若姿态调整好后,夹紧件夹紧保证线控控制器2在调整执行线3的长度时不会影响到姿态。随后电控开关切断载体1内的电路,载体1与一级承载件4之间的磁性消失,切换至移动调控模式:再单独控制线控控制器2上的执行线3的长度,此时的长度为载体1与一级承载件4之间的长度,根据位置需求或者高度需求,调控每个执行线3的长度以完成所需的位置转移或者取放。
67.即不管工件在移动的过程中对姿态是否有需求,最终都会切换至移动调控模完成位置转移或者取放,但是不可避免的会出现临时障碍物。且临时障碍物包括固定的或者活动的,不同形式的临时障碍物决定了避让的形式。
68.故,还包括创建避让模式:在执行移动调控模式时,若出现临时障碍物,则基于临时障碍物的属性选择最佳的避让模式。所述避让模式至少包括:吸附避让模式、路线避让模式和姿态避让模式中的一种或几种。
69.在进一步的实施例中,吸附避让模式的实现方式如下:控制电控开关,使载体1和一级承载件4内的线圈通电并产生磁性,则载体1对一级承载件4进行吸附,一级承载件4对二级承载件5进行吸附,如图5所示。该吸附式避让模式适用于活动的障碍物,且障碍物的高度较低,好比装载有重量级物品的推送小车。换言之,载体1与一级承载件4的线圈均通电,并分别对一级承载件4和二级承载件5进行磁性吸附,使得一级承载件4、二级承载件5均吸附到指定空间的最顶部,剩余的空间为对临时障碍物给出的避让空间。
70.在另一个实施例中,若一级承载件4、二级承载件5均吸附到指定空间的最顶部,同时可通过线控控制器2调节执行线3的长短实现一级承载件4带着二级承载件5在载体1上移动,实现位置移动。即在执行吸附式模式时,根据需求启动移动调控模式。
71.路线避让模式的实现方式如下:更新预定路径得到避让路径,基于避让路径再次进入移动调控模式。换言之,若临时障碍物为固定式的或者短时间内不会消失的,则可基于当前的路况重新生成路径,得到避让路径。此时,无需对二级承载件5的姿态进行调整,因此锁紧件处于锁紧状态。
72.姿态避让模式的实现方式如下:获取所需的避让姿势,基于避让姿势进入姿态调控模式。换言之,若临时障碍物为固定式的或者短时间内不会消失的,且仅需要在空间上做稍微的避让便可避开,则启动姿态避让模式。此时则需要重新进入到上文提到的姿态调整模式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1