机器人野外防水电动快换装置的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种机器人野外防水电动快换装置。
背景技术:
2.机器人快换装置使机器人能够在制造和装备过程中交换使用不同的末端执行器,常用于工业自动化领域领域中的焊接、抓取、检测、卷边、包装等工序,是柔性制造中运用最为广泛的工具之一。
3.目前机器人的快换装置均以气压或液压为动力,无三防措施,不防水,仅适合室内使用,不能用于野外户外场合使用。
技术实现要素:
4.本发明的目的在于提供一种机器人野外防水电动快换装置,旨在解决现有的机器人快换装置无法在野外户外场合使用的问题。
5.为实现上述目的,本发明提供了一种机器人野外防水电动快换装置,包括工具盘、防水盖、主盘、防脱密封条、安装件、多个定位球、两个复合定位销、锁紧楔块和驱动机构;所述工具盘具有两个销孔和定位槽,所述防水盖与所述工具盘螺纹连接,并位于所述工具盘一侧,所述防水盖具有两个连接槽,所述主盘具有安装端面,所述防脱密封条与所述主盘固定连接,并位于所述主盘一侧,所述安装件与所述主盘固定连接,并位于所述主盘内侧,多个所述定位球分别设置在所述安装件上,两个所述复合定位销分别与所述安装件固定连接,并分别穿过所述安装件,所述锁紧楔块滑动设置在所述主盘内侧,所述驱动机构设置在所述主盘上。
6.其中,所述驱动机构包括伺服电机、螺母和丝杠,所述伺服电机与所述主盘固定连接,并位于所述主盘一侧,所述螺母与所述锁紧楔块固定连接,并位于所述锁紧楔块内侧,所述丝杠与所述伺服电机的输出轴固定连接,并与所述螺母螺纹连接,且穿过所述螺母。
7.其中,所述主盘还具有安装槽,所述安装槽位于所述主盘远离所述安装端面一侧。
8.其中,所述锁紧楔块具有卡合槽,所述卡合槽位于所述锁紧楔块侧边。
9.其中,所述锁紧楔块还具有冗余腔,所述冗余腔位于所述锁紧楔块靠近所述丝杠一侧。
10.本发明的一种机器人野外防水电动快换装置,所述连接槽和所述销孔均与所述复合定位销适配,所述驱动机构用于驱动所述锁紧楔块滑动,所述安装件用于活动安装多个所述定位球,所述锁紧楔块有斜面,可以滑动可以挤压所述定位球,所述主盘通过所述安装端面与机器人连接,待工状态时,所述防水盖盖在所述工具盘上,当需要连接所述工具盘与所述主盘时,在机器人的带动下,两个所述复合定位销插入两个所述连接槽,然后转动所述防水盖1/2圈,带起取下所述防水盖放到预定位置,然后将所述安装件插入所述定位槽,两个所述复合定位销对应插入两个所述销孔,所述主盘与所述工具盘贴拢,所述主盘和所述工具盘之间用所述防脱密封条密封,最后启动所述驱动机构,驱动所述锁紧楔块朝着所述
工具盘的方向滑动,挤压多个所述定位球,多个所述定位球被压入所述定位槽内,将所述安装件卡在所述定位槽内,将所述主盘和所述工具盘连接锁定,通过设置所述防水盖和所述防脱密封条,可以起到隔离防水的作用,从而解决现有的机器人快换装置无法在野外户外场合使用的问题。
附图说明
11.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
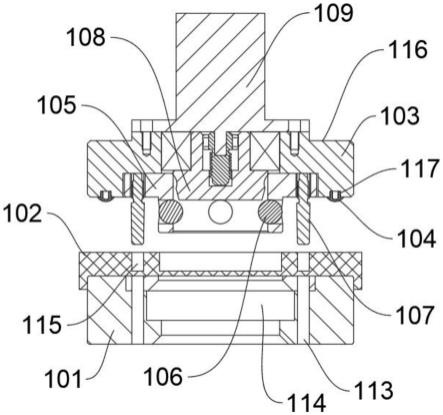
12.图1是本发明提供的一种机器人野外防水电动快换装置的整体的结构示意图。
13.图2是本发明的复合定位销插入连接槽的示意图。
14.图3是本发明的复合定位销将防水盖转动取下的示意图。
15.图4是本发明的复合定位销插入销孔、安装件插入定位槽的示意图。
16.图5是本发明的锁紧楔块将定位球压入定位槽的示意图。
17.图6是本发明的主盘和工具盘连接的示意图。
18.101-工具盘、102-防水盖、103-主盘、104-防脱密封条、105-安装件、106-定位球、107-复合定位销、108-锁紧楔块、109-驱动机构、110-伺服电机、111-螺母、112-丝杠、113-销孔、114-定位槽、115-连接槽、116-安装端面、117-安装槽、118-卡合槽、119-冗余腔。
具体实施方式
19.请参阅图1-图6,其中,图1是本发明提供的一种机器人野外防水电动快换装置的整体的结构示意图,图2是本发明的复合定位销插入连接槽的示意图,图3是本发明的复合定位销将防水盖转动取下的示意图,图4是本发明的复合定位销插入销孔、安装件插入定位槽的示意图,图5是本发明的锁紧楔块将定位球压入定位槽的示意图,图6是本发明的主盘和工具盘连接的示意图。
20.本发明提供一种机器人野外防水电动快换装置:包括工具盘101、防水盖102、主盘103、防脱密封条104、安装件105、多个定位球106、两个复合定位销107、锁紧楔块108和驱动机构109;所述驱动机构109包括伺服电机110、螺母111和丝杠112;所述工具盘101具有两个销孔113和定位槽114;所述防水盖102具有两个连接槽115;所述主盘103具有安装端面116和安装槽117;所述锁紧楔块108具有卡合槽118和冗余腔119。通过前述方案解决了现有的机器人快换装置无法在野外户外场合使用的问题。
21.针对本具体实施方式,所述防水盖102与所述工具盘101螺纹连接,并位于所述工具盘101一侧,所述防脱密封条104与所述主盘103固定连接,并位于所述主盘103一侧,所述安装件105与所述主盘103固定连接,并位于所述主盘103内侧,多个所述定位球106分别设置在所述安装件105上,两个所述复合定位销107分别与所述安装件105固定连接,并分别穿过所述安装件105,所述锁紧楔块108滑动设置在所述主盘103内侧,所述驱动机构109设置在所述主盘103上。所述连接槽115和所述销孔113均与所述复合定位销107适配,所述驱动机构109用于驱动所述锁紧楔块108滑动,所述安装件105用于活动安装多个所述定位球106,所述锁紧楔块108有斜面,可以滑动可以挤压所述定位球106,所述主盘103通过所述安装端面116与机器人连接,待工状态时,所述防水盖102盖在所述工具盘101上,当需要连接
所述工具盘101与所述主盘103时,在机器人的带动下,两个所述复合定位销107插入两个所述连接槽115,然后转动所述防水盖1021/2圈,带起取下所述防水盖102放到预定位置,然后将所述安装件105插入所述定位槽114,两个所述复合定位销107对应插入两个所述销孔113,所述主盘103与所述工具盘101贴拢,所述主盘103和所述工具盘101之间用所述防脱密封条104密封,最后启动所述驱动机构109,驱动所述锁紧楔块108朝着所述工具盘101的方向滑动,挤压多个所述定位球106,多个所述定位球106被压入所述定位槽114内,所述定位球106的一部分卡在所述定位槽114内,将所述安装件105卡在所述定位槽114内,将所述主盘103和所述工具盘101连接锁定,通过设置所述防水盖102和所述防脱密封条104,可以起到隔离防水的作用,从而解决现有的机器人快换装置无法在野外户外场合使用的问题。
22.其中,所述伺服电机110与所述主盘103固定连接,并位于所述主盘103一侧,所述螺母111与所述锁紧楔块108固定连接,并位于所述锁紧楔块108内侧,所述丝杠112与所述伺服电机110的输出轴固定连接,并与所述螺母111螺纹连接,且穿过所述螺母111。所述伺服电机110安装在所述主盘103上,用于驱动所述丝杠112转动,所述丝杠112转动驱动所述螺母111,从而带动所述锁紧楔块108滑动。
23.其次,所述安装槽117位于所述主盘103远离所述安装端面116一侧。所述安装槽117用于安装所述防脱密封条104。
24.同时,所述卡合槽118位于所述锁紧楔块108侧边。所述卡合槽118形状与所述定位球106适配,用于卡住所述定位球106。
25.另外,所述冗余腔119位于所述锁紧楔块108靠近所述丝杠112一侧。所述冗余腔119用于容纳放置所述丝杠112。
26.本发明所述的一种机器人野外防水电动快换装置,所述主盘103通过所述安装端面116与机器人连接,待工状态时,所述防水盖102盖在所述工具盘101上,当需要连接所述工具盘101与所述主盘103时,在机器人的带动下,两个所述复合定位销107插入两个所述连接槽115,然后转动所述防水盖1021/2圈,带起取下所述防水盖102放到预定位置,然后将所述安装件105插入所述定位槽114,两个所述复合定位销107对应插入两个所述销孔113,所述主盘103与所述工具盘101贴拢,所述主盘103和所述工具盘101之间用所述防脱密封条104密封,最后启动所述伺服电机110,带动所述丝杠112转动,所述丝杠112驱动所述螺母111,从而驱动所述锁紧楔块108朝着所述工具盘101的方向滑动,挤压多个所述定位球106,多个所述定位球106被压入所述定位槽114内,所述定位球106的一部分卡在所述定位槽114内,所述卡合槽118和所述定位槽114从左右两侧将所述定位球106卡住,从而将所述安装件105卡在所述定位槽114内,将所述主盘103和所述工具盘101连接锁定。
27.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1