基于力反馈技术的机器人遥操作方法及系统与流程
本发明涉及遥操作机器人控制,具体地,涉及一种基于力反馈技术的机器人遥操作方法及系统。
背景技术:
1、随着科技的进步,人类的探索活动日益活跃,探索范围已遍及世界的各个角落。与此同时,这些探索活动的危险程度和复杂程度日益增加,比如空间机器人维修、地震救灾、危险物拆除等。出于对操作员人身安全的考虑,需要有可靠的执行器代替操作员执行危险任务,从而避免操作员受到不可控的人身伤害。此外,对于工作空间狭小的情况,操作员无法直接进入现场,只能由执行器代替进行作业。但是,随着人类探索活动的进一步深入,完成这些任务所需的精确性和稳定性也日益增加。预编程的执行器受限于传感器、人工智能、控制技术等关键技术的影响,在现阶段很难独立自主地作业于复杂环境,而只能在特定环境执行一些相对简单地任务。因此需要借助机器人遥操作方法,通过人对环境进行分析和决策,进而控制机器人去完成任务。这种方法能够最大限度地提高资源使用率、维护人类的生命安全,并创造巨大的经济效益和社会效益。
2、公开号为cn115056229a的中国发明专利申请公开了一种基于同构型机械臂的遥操作系统和方法。其中,基于同构型机械臂的遥操作系统包括主控端和从控端,主控端包括主机械臂、主计算机pc和第一6维力/力矩传感器,主机械臂和主计算机pc通过局域网连接;从控端包括从机械臂、从计算机pc、第二6维力/力矩传感器和监控设备。该系统存在控制链路复杂的问题,主控端和从控端的数据通信存在较大时延,控制具有一定的滞后性。
3、公开号为cn110480657a的中国发明专利申请公开了一种复杂结构环境空间机器人天地遥操作系统。其硬件系统包括六自由度气浮台、五自由度气浮台、多自由度灵巧操作机械臂、双目相机和激光测量敏感器、消旋与捕获工具、omega-7操作手柄和驱动踏板、台上台下控制器。该系统采用视觉算法进行目标特征提取和位姿测量等计算分析,缺乏位姿信息采集的高精度和高分辨率。
4、综上所述,目前传统机器人遥操作方法存在主控端操作难度大,从端控制精度差、力感知交互差等问题。
技术实现思路
1、本发明针对现有技术中存在的上述不足,提供了一种基于力反馈技术的机器人遥操作方法及系统。
2、本发明的目的是通过以下技术方案实现的:
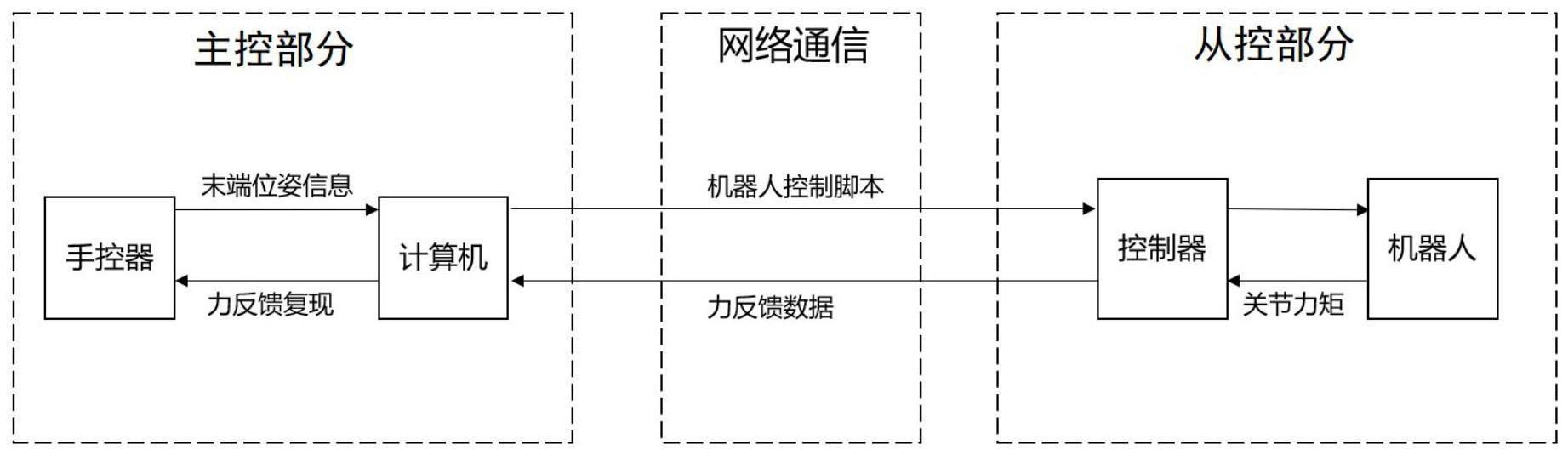
3、根据本发明的一个方面,提供了一种基于力反馈技术的机器人遥操作控制方法,包括:主控部分和从控部分;其中:
4、所述主控部分获取用于机器人遥操作的手控器位姿信息,基于手控器工作空间和机器人末端工作空间之间的映射关系,对所述手控器位姿信息进行处理,得到机器人各关节角度,生成机器人控制信号并输出至所述从控部分;同时,从所述从控部分获取机器人的力反馈数据,生成力矩复现控制信号,用于在手控器上复现机器人的各关节力反馈信息;
5、所述从控部分接收所述机器人控制信号用于控制机器人完成相应动作,同时采集机器人各关节的力反馈数据,并发送给所述主控制部分。
6、可选地,所述手控器工作空间和机器人末端工作空间之间的映射关系,包括:手控器与机器人末端之间的平动映射关系和手控器与机器人末端之间的转动映射关系。
7、可选地,所述手控器与机器人末端之间的平动映射关系,包括:
8、手控器末端坐标(px,py,pz)与机器人末端坐标(posx,posy,posz)之间的平动映射关系如下公式所示:
9、
10、其中,home-posx、home_posy、home_posz表示机器人末端在基坐标下的初始坐标,k表示主控部分与从控部分之间位置映射的比例系数。
11、可选地,所述手控器与机器人末端之间的转动映射关系,包括:
12、手控器末端欧拉角与机器人末端旋转向量之间的转动映射关系如下公式所示:
13、r=rz×ry×rx
14、
15、
16、其中,r表示手控器末端欧拉角对应的旋转矩阵,rz表示偏航角对应的旋转矩阵,ry表示俯仰角对应的旋转矩阵,rx表示滚转角对应的旋转矩阵,θ表示机器人末端旋转向量的角度,tr(·)表示矩阵的迹,n表示机器人末端旋转向量的旋转轴,表示向量的反对称变换符。
17、可选地,所述从控部分获取机器人的力反馈数据,生成力矩复现控制信号,包括:
18、实时读取机器人末端三个方向的力反馈数据fx、ft和fz,并以设定的比例将机器人末端的力反馈数据转换为力矩复现控制信号映射到手控器末端。
19、可选地,所述主控部分利用实时数据交换接口通过标准tcp/ip协议与所述从控部分之间实现同步。
20、可选地,所述主控部分通过实时数据交换相关接口,实现对所述从控部分的机器人终端进行动作控制和实时数据获取。
21、根据本发明的另一个方面,提供了一种基于力反馈技术的机器人遥操作控制系统,包括:主控端和从控端;其中:
22、所述主控端包括手控器和主计算机,所述主控器输出用于机器人遥操作的手控器位姿信息至所述主计算机,所述主计算机基于手控器工作空间和机器人末端工作空间之间的映射关系,对所述手控器位姿信息进行处理,得到机器人各关节角度,生成机器人控制信号并输出至所述从控;同时,从所述从控端获取机器人的力反馈数据,生成力矩复现控制信号,用于在所述手控器上复现机器人的各关节力反馈信息;
23、所述从控端包括从计算机、机器人控制柜和机器人终端,所述从计算机接收所述机器人控制信号,并通过所述机器人控制柜控制所述机器人终端完成相应动作,同时通过所述机器人控制柜采集机器人各关节的力反馈数据,并发送至所述主控端。
24、可选地,所述手控器采用并联型桌面式力反馈手控器omega.7,所述手控器omega.7与所述主计算机通过usb数据线连接,并通过所述手控器提供的sdk与c++接口实现对所述手控器位姿信息的获取和处理以及对所述力反馈数据的复现。
25、可选地,所述机器人采用ur5机器人,所述机器人控制柜与所述从计算机集成在所述ur5机器人的控制箱中。
26、可选地,所述ur5机器人末端安装有on robot rg2夹爪。
27、可选地,所述ur5机器人通过电缆与所述控制箱连接。
28、可选地,所述主控端利用实时数据交换接口通过标准tcp/ip协议与所述从控端之间实现同步。
29、可选地,所述主控端通过实时数据交换相关接口,实现对所述从控端的机器人终端进行动作控制和实时数据获取。
30、由于采用了上述技术方案,本发明与现有技术相比,具有如下至少一项的有益效果:
31、本发明提供的基于力反馈技术的机器人遥操作方法及系统,通过将机器人末端受力(力反馈)以一定的比例映射到手控器末端,且比例是可调整的,增强了用户对从控端作业环境的力感知水平。
32、本发明提供的基于力反馈技术的机器人遥操作方法及系统,可以通过基于tcp/ip协议进行网络通信,简化了数据传输链路,对遥操作普遍存在的时延大、稳定性差等问题进行了优化,提高了遥操作过程中机器人控制的稳定性和精确性。
33、本发明提供的基于力反馈技术的机器人遥操作方法及系统,将主控端手控器工作空间和从控端机器人末端工作空间之间的映射关系解耦为笛卡尔空间的平动映射关系和转动映射关系,简化控制程序,减少遥操作过程的延迟,同时降低了主从计算机的配置要求。
- 还没有人留言评论。精彩留言会获得点赞!