一种智能家居机器人的制作方法
1.本实用新型涉及家居设备领域,尤其涉及一种智能家居机器人。
背景技术:
2.随着科技的发展,智能机器人已经逐渐走进了千家万户,机器人的使用极大地方便了人们的生活,给人们的生活带来了诸多的便利之处。
3.现有的智能机器人虽然能够移动,但是往往不易夹取和运输物品,实用价值不高,故需要一种智能家居机器人以解决上述问题。
技术实现要素:
4.本实用新型实施例的目的在于提供一种智能家居机器人,旨在解决以下问题:现有的机器人不易夹取和运输物品。
5.本实用新型实施例是这样实现的,一种智能家居机器人,包括:机体和万向轮,万向轮安装在机体一侧,所述机体另一侧开设有通口;旋转机构,其主体安装在机体内,旋转机构一个动力输出端由机体所开始的通口延伸至机体外且固定设置有转向头,转向头可在旋转机构的带动下转动,旋转机构另一个动力输出端向两侧延伸至机体外;夹取机构,设置在机体外且与旋转机构另一个动力输出端固定连接,用于取用所需要的物品。
6.优选地,所述旋转机构包括:第一动力件,固定安装在机体内,用于为旋转机构提供必要的动力支持,所述第一动力件输出轴固定连接有转柱;第一锥齿轮,其转轴固定设置在转柱上,第一锥齿轮两侧啮合有可改变动力传动方向的第二锥齿轮;扣合组件,设置有多个,多个扣合组件一端分别和转柱及第二锥齿轮固定连接,用于中断或连接第一动力件的输出动力;转杆,与一个扣合组件固定连接且开设有凹槽,所述转杆由通口延伸至机体外且与转向头连接;稳定套,两端固定设置在机体侧壁上,稳定套套设在转杆所开设的凹槽上,用于维持转杆转动的稳定;延伸杆,与另一个扣合组件固定连接,延伸杆远离扣合组件的一端穿过机体与夹取机构固定连接。
7.优选地,所述扣合组件包括:保护壳,其内安装有用于为扣合组件提供驱动力的第二动力件;螺纹杆,一端与第二动力件输出轴固定连接,螺纹杆另一端转动安装在保护壳内壁上,所述螺纹杆上螺纹套设有可在其转动下移动的螺纹套;推板,固定设置在螺纹套两侧,两侧推板上固定设置有延伸至保护壳外的配位杆;圆盘,其上开设有配位孔,配位杆可进入到配位孔内。
8.优选地,所述夹取机构包括:支撑架,与延伸杆设置在机体外的一端固定连接,所述支撑架内侧固定设置有安装板;齿轮,设置有两个且转动设置在安装板上,两个齿轮上固定有用于对物品进行夹持的夹块;双面齿条,设置在两个齿轮之间且与齿轮啮合,两个齿轮可在双面齿条的移动下转动;驱动组件,其安装在支撑架及安装板上,用于控制双面齿条移动。
9.优选地,所述驱动组件包括:第三动力件,其固定设置在安装板上,第三动力件输
出轴固定连接有同时和支撑架转动连接的螺纹柱,螺纹柱上螺纹套设有螺纹块;滑杆,两端分别和支撑架及安装板固定连接且与螺纹柱对应设置,所述滑杆上滑动套设有与螺纹块对应设置的滑块;压板,两端分别和滑块及螺纹块固定连接,压板同时与双面齿条连接,用于拉动双面齿条移动。
10.本实用新型提供的智能家居机器人不仅可以在各个方向上移动,而且能够夹取输送物品,操作简单,实用性较强。
附图说明
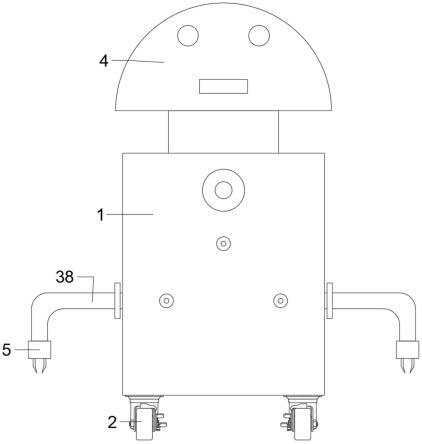
11.图1为智能家居机器人外观示意图。
12.图2为智能家居机器人的旋转机构示意图。
13.图3为智能家居机器人的扣合组件示意图。
14.图4为智能家居机器人的圆盘侧视图。
15.图5为智能家居机器人的夹取机构示意图。
16.附图中:1-机体,2-万向轮,3-旋转机构,4-转向头,5-夹取机构,31-第一动力件,32-转柱,33-第一锥齿轮,34-第二锥齿轮,35-扣合组件,36-转杆,37-稳定套,38-延伸杆,351-保护壳,352-第二动力件,353-螺纹杆,354-螺纹套,355-推板,356-配位杆,357-圆盘,358-配位孔,51-支撑架,52-安装板,53-齿轮,54-夹块,55-双面齿条,56-驱动组件,561-第三动力件,562-螺纹柱,563-螺纹块,564-滑杆,565-滑块,566-压板。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不限定本实用新型。
18.以下结合具体实施例对本实用新型的具体实现进行详细描述。
19.请参阅图1和图2,本实用新型实施例提供的一种智能家居机器人,所述智能家居机器人包括:
20.机体1和万向轮2,万向轮2安装在机体1一侧,所述机体1另一侧开设有通口;旋转机构3,其主体安装在机体1内,旋转机构3一个动力输出端由机体1所开始的通口延伸至机体1外且固定设置有转向头4,转向头4可在旋转机构3的带动下转动,旋转机构3另一个动力输出端向两侧延伸至机体1外;夹取机构5,设置在机体1外且与旋转机构3另一个动力输出端固定连接,用于取用所需要的物品。
21.在使用该机器人时,首先按压机体1上的开关,将机器人开启,万向轮2的动力来为电机,可以控制机器人移动,开启旋转机构3,旋转机构3可带动转向头4转动,从而可对机器人转向头4的方位进行调整,同时,旋转机构3可带动夹取机构5转动,再将夹取机构5移动到指定位置,即可使用夹取机构5取用所需要的物品。
22.如图2所示,作为本实用新型的一种优选实施例,所述旋转机构3包括:第一动力件31,固定安装在机体1内,用于为旋转机构3提供必要的动力支持,所述第一动力件31输出轴固定连接有转柱32;第一锥齿轮33,其转轴固定设置在转柱32上,第一锥齿轮33两侧啮合有可改变动力传动方向的第二锥齿轮34;扣合组件35,设置有多个,多个扣合组件35一端分别
和转柱32及第二锥齿轮34固定连接,用于中断或连接第一动力件31的输出动力;转杆36,与一个扣合组件35固定连接且开设有凹槽,所述转杆36由通口延伸至机体1外且与转向头4连接;稳定套37,两端固定设置在机体1侧壁上,稳定套37套设在转杆36所开设的凹槽上,用于维持转杆36转动的稳定;延伸杆38,与另一个扣合组件35固定连接,延伸杆38远离扣合组件35的一端穿过机体1与夹取机构5固定连接。
23.开启第一动力件31,第一动力件31具体为电机,第一动力件31输出轴带动转柱32转动,转柱32转动带动第一锥齿轮33转动,第一锥齿轮33转动带动两侧的第二锥齿轮34转动,当一侧的扣合组件35处于连接状态时,转柱32转动可带动转杆36在稳定套37上转动,转杆36转动即可带动转向头4转动,当另一侧的扣合组件35处于连接状态时,第二锥齿轮34转动可带动延伸杆38转动,延伸杆38转动即可带动夹取机构5向上或向下转动。
24.如图3和图4所示,作为本实用新型的一种优选实施例,所述扣合组件35包括:保护壳351,其内安装有用于为扣合组件35提供驱动力的第二动力件352;螺纹杆353,一端与第二动力件352输出轴固定连接,螺纹杆353另一端转动安装在保护壳351内壁上,所述螺纹杆353上螺纹套设有可在其转动下移动的螺纹套354;推板355,固定设置在螺纹套354两侧,两侧推板355上固定设置有延伸至保护壳351外的配位杆356;圆盘357,其上开设有配位孔358,配位杆356可进入到配位孔358内。
25.若要将配位杆356延伸至配位孔358内,开启第二动力件352,第二动力件352具体为电机,第二动力件352输出轴带动螺纹杆353转动,螺纹杆353转动可带动螺纹套354沿着螺纹杆353向右移动,螺纹套354向右移动可使得推板355推动两侧的配位杆356向右移动,配位杆356向右移动即可进入到圆盘357所开设的配位孔358内,从而可将将配位杆356延伸至配位孔358内。
26.如图5所示,作为本实用新型的一种优选实施例,所述夹取机构5包括:支撑架51,与延伸杆38设置在机体1外的一端固定连接,所述支撑架51内侧固定设置有安装板52;齿轮53,设置有两个且转动设置在安装板52上,两个齿轮53上固定有用于对物品进行夹持的夹块54;双面齿条55,设置在两个齿轮53之间且与齿轮53啮合,两个齿轮53可在双面齿条55的移动下转动;驱动组件56,其安装在支撑架51及安装板52上,用于控制双面齿条55移动。
27.在进行物品的夹取时,开启驱动组件56,驱动组件56动力输出端带动双面齿条55向上移动,双面齿条55向上移动可带动两个齿轮53在安装板52上转动,齿轮53转动即可带动两个夹块54相互接近并对物品进行夹持。
28.如图5所示,作为本实用新型的一种优选实施例,所述驱动组件56包括:第三动力件561,其固定设置在安装板52上,第三动力件561输出轴固定连接有同时和支撑架51转动连接的螺纹柱562,螺纹柱562上螺纹套设有螺纹块563;滑杆564,两端分别和支撑架51及安装板52固定连接且与螺纹柱562对应设置,所述滑杆564上滑动套设有与螺纹块563对应设置的滑块565;压板566,两端分别和滑块565及螺纹块563固定连接,压板566同时与双面齿条55连接,用于拉动双面齿条55移动。
29.开启第三动力件561,第三动力件561具体为电机,第三动力件561输出轴带动螺纹柱562转动,螺纹柱562转动带动螺纹块563向上运动,螺纹块563向上运动是的压板566带动滑块565沿着滑杆564向上运动,从而避免了螺纹块563自身发生转动,压板566向上运动即可带动双面齿条55向上运动,进而可带动夹块54对物品进行夹持。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1