一种具有密封结构旋转关节及协作机器人的制作方法
1.本技术实施例属于机器人技术领域,具体涉及具有密封结构旋转关节及协作机器人。
背景技术:
2.各种机械设备的应用场景越来越广泛,如抛光、打磨、洁净车间、户外雨雪天气等,这些设备通常都具有多个旋转关节,例如工业机器人、协作机器人。现有市场的工业机器人、协作机器人等很少能够达到ip66防护等级,它们的旋转关节之间的密封一直是一个难题,很少能够在潮湿、油污、粉尘等恶劣、复杂环境中应用自如,无法达到较高的防护等级。
技术实现要素:
3.本技术实施例的目的在于提供一种具有密封结构旋转关节及协作机器人,用以解决或缓解上述一个或者部分技术问题。
4.为实现上述目的,本技术实施例提供了一种具有密封结构旋转关节,包括:动力机构,机械臂壳体,第一密封结构和盖体;
5.所述动力机构包括输出轴和动力机构壳体,所述动力机构壳体设置在输出轴外围,所述盖体通过第一固定件设置在机械臂壳体上,所述机械臂壳体通过第二固定件设置在输出轴上,所述机械臂壳体和动力结构壳体之间设置有第一凹槽,所述第一密封结构设置在第一凹槽中,第一密封结构为动态密封结构。
6.作为本技术一优选实施例,所述第一密封结构靠近输出轴的一侧与机械臂壳体抵接,所述第一密封结构靠近动力机构壳体一侧与动力结构壳体抵接。
7.作为本技术一优选实施例,所述动力机构壳体靠近第一密封结构的侧面为光滑面。
8.作为本技术一优选实施例,所述动力结构壳体和第一密封结构之间设置有支撑件,所述支撑件靠近第一密封结构的侧面为光滑面。
9.作为本技术一优选实施例,所述固定件的外围设置有第二密封结构。
10.作为本技术一优选实施例,所述第二密封结构为静态密封结构,且第二密封结构为锥形。
11.作为本技术一优选实施例,所述盖体与所述机械臂壳体之间设置有第二凹槽和第三凹槽。
12.作为本技术一优选实施例,所述第二凹槽和第三凹槽之间分别设置有第三密封结构和第四密封结构。
13.作为本技术一优选实施例,所述第三密封结构和第四密封结构为静态密封结构。
14.第二方面,本技术实施例还提供了一种协作机器人,包括第一方面任一项技术方案所述的一种具有密封结构旋转关节。
15.本技术实施例通过在机械臂壳体和动力结构壳体之间设置的第一凹槽中设置动
态密封结构,可以使机器人等使用旋转关节的设备能够满足ip66的防护等级,能在潮湿、油污、粉尘等恶劣、复杂环境中正常工作,电气设备不受影响。
附图说明
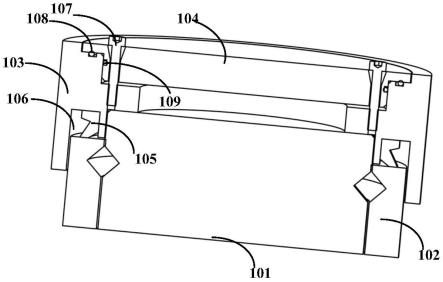
16.图1为本技术实施例提供的一种具有密封结构旋转关节剖面结构示意图;
17.图2为本技术实施例提供的一种具有密封结构旋转关节的立体结构示意图。
具体实施方式
18.为了使本技术领域的人员更好地理解本技术的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
19.第一方面,如图1和图2所示,本技术实施例提供了一种具有密封结构旋转关节,具体包括:动力机构,机械臂壳体103,第一密封结构105和盖体104。
20.所述动力机构包括输出轴101和动力机构壳体102,所述动力机构壳体102 设置在输出轴101外围,所述盖体104通过第一固定件107设置在机械臂壳体 103上,防止外界气体和粉尘进入关节内部起到密封的作用,去除盖体104可以方便在旋转关节中安装相关部件,所述机械臂壳体103通过所述第二固定件(未示出)设置在输出轴101上,所述盖体104和所述机械臂壳体103可以随着输出轴101中的旋转而旋转,所述机械臂壳体103和动力结构壳体102之间设置有第一凹槽106,机械臂壳体103和动力机构壳体102相对旋转,为了达到ip66 的防护等级,需要在相对旋转部件之间增加动态密封结构,本技术实施例中所述第一密封结构105设置在第一凹槽106中,第一密封结构105为动态密封结构。
21.所述第一密封结构105靠近输出轴101的一侧与机械臂壳体103抵接,所述第一密封结构105靠近动力机构壳体102一侧与动力结构壳体抵接。
22.为了更好的促进第一密封结构105随着输出轴101的旋转而旋转,所述动力机构壳体102靠近第一密封结构105的侧面为光滑面且为硬质材质。
23.作为本技术的另一个实施例,也可以在第一密封结构105和动力机构壳体 102之间设置有支撑件(未示出),所述支撑件(未示出)靠近第一密封结构105 的侧面为光滑面,所述支撑件(未示出)也设置在第一凹槽106中,所述支撑件靠近输出轴101的一侧与机械臂壳体103抵接,所述支撑件靠近动力机构壳体102一侧与动力机构壳体102固连。
24.也就是说,输出轴101,机械臂壳体103和盖体104通过第一固定件107固接在一起,相对于动力机构壳体102作相对旋转运动,机械臂壳体103和动力结构壳体102之间的缝隙通过第一密封结构105进行动态密封,第一密封结构105设置在机械臂壳体103的第一凹槽106中,第一密封结构105通过自身的弹性变形压紧在动力机构壳体102的端面上,第一密封结构105一侧面过盈设置在机械臂壳体103的侧面上,第一密封结构105另一侧面与动力机构壳体102 动态密封,第一密封结构105为唇形密封圈,唇形密封圈变形具有方向性,只能防止关节外侧的异物进入关节内部,如果要防止关节内部的异物泄漏到外部,需求改用y型密封垫或者其它两侧能防止泄漏的密封结构。另外,第一密封结构105和动力机构壳体102
会相对高速旋转,动力机构壳体102端面需要光滑,且要涂防止挥发的润滑脂,从而提高第一密封结构105的寿命。
25.在本技术实施例中,所述第一固定件107的外围设置有第二密封结构110,所述第二密封结构110为静态密封结构,且第二密封结构110为锥形。
26.由于机械臂壳体103和盖体104之间通过第一固定件107紧固,第一固定件107会穿入第二密封结构110,盖体104的第一固定件107的孔会预留锥形孔台阶,当第一固定件107使用合适的扭矩拧紧后,第二密封结构110被压紧后通过弹性变形起到密封第一固定件107和盖体104的螺钉孔间隙的作用,防止水汽、油污等从螺钉和螺纹之间缝隙进出机器人内部,在本技术实施例中,动力机构可以为电机,第一固定件107为螺钉。
27.所述盖体104与所述机械臂壳体103之间设置有第二凹槽和第三凹槽,所述第二凹槽和第三凹槽之间分别设置有第三密封结构108和第四密封结构109,其中所述第三密封结构108和第四密封结构109为静态密封结构。
28.在本技术实施例中,机械臂壳体103和盖体104之间第三密封结构108和第四密封结构109可以为o型密封圈进行密封,作为本技术的优选实施例,也可以去掉其中一个密封结构。
29.第二方面,本技术实施例还提供了一种协作机器人,包括第一方面任一项技术方案所述的一种具有密封结构旋转关节。
30.虽然,本文中已经用一般性说明及具体实施例对本技术作了详尽的描述,但在本技术基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本技术精神的基础上所做的这些修改或改进,均属于本技术要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1