一种可调抓力的无人机机械抓手的制作方法
1.本实用新型涉及无人机配载功能装置领域,具体涉及一种可调抓力的无人机机械抓手。
背景技术:
2.无人机机械抓手安装在无人机上,用于抓取、移动物资工具的配套装置。现有无人机搭配安装的机械抓手普遍为金属或合金型材,不仅闭合精度低、灵活性差,固定的夹爪停止位置不具备方便快捷的设定调节抓力的功能效果。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有无人机搭载的机械抓手闭合精度低、灵活性差,以及无法方便快捷的调节抓力的缺陷,提供一种可调抓力的无人机机械抓手,其闭合灵活、停止位置精度高,通过对抓爪抓面的结构设计,配合控制器对抓爪闭合量的反馈控制,实现了抓爪闭合抓力的快速无接触调节。
4.本可调抓力的无人机机械抓手包括机架、安装盘和抓手机构,所述机架通过连杆安装在安装盘下方,所述抓手机构安装在机架上,其中,所述抓手机构包括一对抓爪、舵机、控制器和配电器,所述舵机、控制器和配电器均安装在机架上,所述抓爪安装在舵机的舵盘上;所述配电器通过供电线与所述舵机和控制器分别连接,所述控制器的输入端通过第一信号线与抓爪连接,控制器的输出通过第二信号线与舵机连接。
5.具体到控制器的逻辑结构以及元件连接,所述控制器内部主板上集成有主控模块、存储模块和无线数传模块,所述主控模块通过rd/wr管脚与所述存储模块读写连接,主控模块通过串口总线所述无线数传模块双向数据连接。
6.具体到抓爪的结构及控制器的外部连接,所述抓爪内侧设有承压胶块,所述承压胶块与抓爪内壁之间设有薄膜压力传感器;所述舵机内设有用于调节舵盘转动角度的可调电位器,所述薄膜压力传感器通过第一信号线与所述主控模块的输入端管脚信号连接,主控模块的输出端通过第二信号线与所述舵机的可调电位器信号连接。
7.具体到控制器的主要功能元件选择,所述主控模块采用stm32f405r处理芯片,所述存储模块采用sram-ly61256存储芯片,所述无线数传模块采用 nrf905射频收发芯片。
8.进一步的,所述安装盘上设有固定丝孔,并配有连接螺栓。用于与无人机底盘连接固定。
9.进一步的,所述连杆为二节式伸缩管。用于调节抓手与无人机的相对位置。
10.本实用新型一种可调抓力的无人机机械抓手,克服了现有无人机搭载的机械抓手闭合精度低、灵活性差,以及无法方便快捷的调节抓力的缺陷,其闭合灵活、停止位置精度高,通过对抓爪抓面的结构设计,配合控制器对抓爪闭合量的反馈控制,实现了抓爪闭合抓力的快速无接触调节,极大程度的扩展了无人机载抓爪的使用范围和应用对象。
附图说明
11.下面结合附图对本实用新型一种可调抓力的无人机机械抓手作进一步说明:
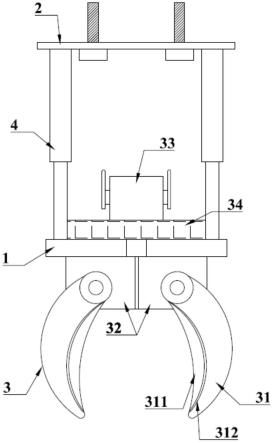
12.图1是本可调抓力的无人机机械抓手的平面结构示意图;
13.图2是本可调抓力的无人机机械抓手所述控制器的逻辑结构连接线框图。
14.图中:
15.1-机架、2-安装盘、3-抓手机构、;
16.31-抓爪、32-舵机、33-控制器、34-配电器;
17.311-承压胶块、312-薄膜压力传感器;321-可调电位器;331-主控模块、332
‑ꢀ
存储模块、333-无线数传模块。
具体实施方式
18.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
19.在本实用新型的描述中,需要理解的是,术语“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置关系均为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.以下用具体实施例对本实用新型技术方案做进一步描述,但本实用新型的保护范围不限制于下列实施例。
21.实施方式1:如图1、2所示,本可调抓力的无人机机械抓手包括包括机架 1、安装盘2和抓手机构3,所述机架1通过连杆4安装在安装盘2下方,所述抓手机构3安装在机架1上,其中,所述抓手机构3包括一对抓爪31、舵机32、控制器33和配电器34,所述舵机32、控制器33和配电器34均安装在机架1 上,所述抓爪31安装在舵机32的舵盘上;所述配电器34通过供电线与所述舵机32和控制器33分别连接,所述控制器33的输入端通过第一信号线与抓爪31 连接,控制器33的输出通过第二信号线与舵机32连接。所述控制器33内部主板上集成有主控模块331、存储模块332和无线数传模块333,所述主控模块331 通过rd/wr管脚与所述存储模块332读写连接,主控模块331通过串口总线所述无线数传模块333双向数据连接。所述抓爪31内侧设有承压胶块311,所述承压胶块311与抓爪内壁之间设有薄膜压力传感器312;所述舵机32内设有用于调节舵盘转动角度的可调电位器321,所述薄膜压力传感器312通过第一信号线与所述主控模块331的输入端管脚信号连接,主控模块331的输出端通过第二信号线与所述舵机32的可调电位器321信号连接。
22.实施方式2:本可调抓力的无人机机械抓手所述主控模块331采用 stm32f405r处理芯片,所述存储模块332采用sram-ly61256存储芯片,所述无线数传模块333采用nrf905射频收发芯片。针对简单脉冲信号控制的电平信号输出,stm32f405r处理芯片结构简单并同时具有体积小、功耗低的优点; sram-ly61256存储芯片为与stm32系列单片机相匹配的存储芯片中,存取读写速度较快的非集成外部存储模块;nrf905射频收发芯片可通过串口
与stm32f405r处理芯片实现数据双向通信。其余结构和部件如实施方式1所述,不再重复描述。
23.实施方式3:本可调抓力的无人机机械抓手所述安装盘2上设有固定丝孔,并配有连接螺栓。用于与无人机底盘连接固定。所述连杆4为二节式伸缩管。用于调节抓手与无人机的相对位置。其余结构和部件如实施方式1所述,不再重复描述。
24.运行时:通过外部控制端(遥控器或手柄)通过无线数传模块向主控模块发送收爪压力信号,并写入存储模块,主控芯片向可调电位器发送控制信号,电位器改变电位调节抓爪终止位置,薄膜压力传感器采集抓爪与承压胶块之间的压力值反馈至主控芯片,主控芯片读取存储模块中的压力信号指令,当输入压力信号不等于指令压力信号,主控芯片调节可调电位器改变电位调节抓爪位置至压力信号相等,进而实现抓力的快捷精确的调节。
25.本可调抓力的无人机机械抓手克服了现有无人机搭载的机械抓手闭合精度低、灵活性差,以及无法方便快捷的调节抓力的缺陷,其闭合灵活、停止位置精度高,通过对抓爪抓面的结构设计,配合控制器对抓爪闭合量的反馈控制,实现了抓爪闭合抓力的快速无接触调节,极大程度的扩展了无人机载抓爪的使用范围和应用对象。
26.以上描述显示了本实用新型的主要特征、基本原理,以及本实用新型的优点。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施方式或者实施例的细节,且在不背离本实用新型的精神或者基本特征的情况下,能够以其他的具体形式实现本实用新型。因此应将上述实施方式或者实施例看作示范性的,且非限制性的。本实用新型的范围由所附权利要求而非上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
27.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1