一种机械臂气动锁紧装置的制作方法
1.本实用新型是一种机械臂气动锁紧装置,属于机械臂技术领域。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
3.现有技术中,现有的机械臂在使用的过程中,机械臂末端的机械爪在抓持较重物体时,物体在其自身重力的作用下产生向下的运动状态,导致机械爪抓持不够牢固,容易产生松动以及脱落,同时当出现断电情况时,机械臂内部的电子元气件不工作,机械爪对物体的抓持力不够,就会导致物体从机械爪中脱落,现在急需一种机械臂气动锁紧装置来解决上述出现的问题。
技术实现要素:
4.针对现有技术存在的不足,本实用新型目的是提供一种机械臂气动锁紧装置,以解决上述背景技术中提出的问题,本实用新型结构合理,便于对机械爪进行自动锁紧,防止物体松动,同时能够在断电后对物体仍然保持抓持状态,不会使物体脱落。
5.为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种机械臂气动锁紧装置,包括机械臂主体、铝合金缸体、固定板、机械爪以及气动锁紧机构,所述机械臂主体下侧安装有铝合金缸体,所述机械臂主体下侧安装有机械爪,所述机械臂主体左右两侧安装有固定板,所述机械爪左右两侧设置有气动锁紧机构,所述气动锁紧机构包括横向支撑挂板、断电保护组件、气动软管、气动挡板、定位支撑套筒、气动套筒、锁紧顶杆以及竖向支撑挂板,所述横向支撑挂板安装于固定板的右侧,所述横向支撑挂板下侧安装有竖向支撑挂板,所述竖向支撑挂板内部贯穿安装有定位支撑套筒,所述定位支撑套筒内部固定安装有气动套筒,所述气动套筒内部安装有锁紧顶杆,所述锁紧顶杆右端面安装有气动挡板,所述气动套筒右侧安装有气动软管,所述气动套筒内部右侧设置有断电保护组件。
6.进一步地,所述断电保护组件由电磁铁、定位支杆、固定套筒、复位压缩弹簧、支撑复位挡板、内置式卡盘、密封卡板、通气孔以及定位卡槽组成,所述电磁铁安装于横向支撑挂板下端面右侧,所述固定套筒安装于气动套筒环形侧面上侧,所述内置式卡盘安装于气动套筒内部右侧,所述内置式卡盘内部开设有通气孔,所述通气孔内部开设有定位卡槽,所述通气孔内部上侧设置有密封卡板,所述密封卡板上侧安装有定位支杆,所述定位支杆环形侧面安装有支撑复位挡板,所述支撑复位挡板上侧设置有复位压缩弹簧。
7.进一步地,所述定位支杆与固定套筒连接处安装有密封垫圈,所述定位卡槽规格与密封卡板规格相匹配,所述密封卡板宽度大于通气孔内径长度,所述定位卡槽内部设置有橡胶密封垫。
8.进一步地,所述气动锁紧机构设置有两组,且两组所述气动锁紧机构规格相同,两组所述气动锁紧机构对称设置于铝合金缸体左右两侧。
9.进一步地,所述锁紧顶杆与机械爪连接处安装有连接卡座,所述连接卡座规格与锁紧顶杆规格相匹配,所述锁紧顶杆通过连接卡座与机械爪固定连接。
10.进一步地,所述定位支撑套筒内径与气动套筒直径相同,所述定位支撑套筒与气动套筒连接处设置有紧固螺栓,所述紧固螺栓贯穿定位支撑套筒与气动套筒通过螺纹固定连接。
11.本实用新型的有益效果:本实用新型的一种机械臂气动锁紧装置,因本实用新型添加了横向支撑挂板、断电保护组件、气动软管、气动挡板、定位支撑套筒、气动套筒、锁紧顶杆以及竖向支撑挂板,该设计能够对机械爪的抓持位置进行启动锁紧固定,使得机械爪不易松动,同时能够在断电时对机械爪进行锁紧,防止机械爪张开使所夹持的物体掉落损坏,解决了原有机械臂内部机械爪不能进行锁紧固定的问题,提高了本实用新型的实用性。
附图说明
12.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
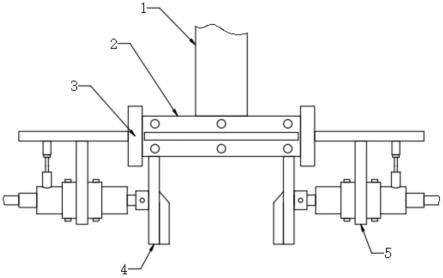
13.图1为本实用新型一种机械臂气动锁紧装置的结构示意图;
14.图2为本实用新型一种机械臂气动锁紧装置中气动锁紧机构的正视剖视图;
15.图3为本实用新型一种机械臂气动锁紧装置中a的结构放大示意图;
16.图4为本实用新型一种机械臂气动锁紧装置中断电保护组件的右视剖视图;
17.图中:1-机械臂主体、2-铝合金缸体、3-固定板、4-机械爪、5-气动锁紧机构、51-横向支撑挂板、52-断电保护组件、53-气动软管、54-气动挡板、55-定位支撑套筒、56-气动套筒、57-锁紧顶杆、58-竖向支撑挂板、521-电磁铁、522-定位支杆、523-固定套筒、524-复位压缩弹簧、525-支撑复位挡板、526-内置式卡盘、527-密封卡板、528-通气孔、529-定位卡槽、551-紧固螺栓、571-连接卡座。
具体实施方式
18.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
19.请参阅图1-图4,本实用新型提供一种技术方案:一种机械臂气动锁紧装置,包括机械臂主体1、铝合金缸体2、固定板3、机械爪4以及气动锁紧机构5,机械臂主体1下侧安装有铝合金缸体2,机械臂主体1下侧安装有机械爪4,机械臂主体1左右两侧安装有固定板3,机械爪4左右两侧设置有气动锁紧机构5。
20.气动锁紧机构5包括横向支撑挂板51、断电保护组件52、气动软管53、气动挡板54、定位支撑套筒55、气动套筒56、锁紧顶杆57以及竖向支撑挂板58,横向支撑挂板51安装于固定板3的右侧,横向支撑挂板51下侧安装有竖向支撑挂板58,竖向支撑挂板58内部贯穿安装有定位支撑套筒55,定位支撑套筒55内部固定安装有气动套筒56,气动套筒56内部安装有锁紧顶杆57,锁紧顶杆57右端面安装有气动挡板54,气动套筒56右侧安装有气动软管53,气动套筒56内部右侧设置有断电保护组件52,该设计解决了原有机械臂内部机械爪4不能进
行锁紧固定的问题。
21.电磁铁521、定位支杆522、固定套筒523、复位压缩弹簧524、支撑复位挡板525、内置式卡盘526、密封卡板527、通气孔528以及定位卡槽529组成了断电保护组件52,电磁铁521安装于横向支撑挂板51下端面右侧,固定套筒523安装于气动套筒56环形侧面上侧,内置式卡盘526安装于气动套筒56内部右侧,内置式卡盘526内部开设有通气孔528,通气孔528内部开设有定位卡槽529,通气孔528内部上侧设置有密封卡板527,密封卡板527上侧安装有定位支杆522,定位支杆522环形侧面安装有支撑复位挡板525,支撑复位挡板525上侧设置有复位压缩弹簧524,该设计能够通过断电保护组件52对气动锁紧机构5进行断电保护,在断电时通过密封卡板527密封通气孔528对气动套筒56内部的气体进行密封,进而对锁紧顶杆57的位置进行固定,使机械爪4保持断电前的状态。
22.密封垫圈设置于定位支杆522与固定套筒523连接处,定位卡槽529规格与密封卡板527规格相匹配,密封卡板527宽度大于通气孔528内径长度,橡胶密封垫设置于定位卡槽529内部,通过设置的密封垫圈与橡胶密封垫能够对连接处进行密封,防止气动套筒56内部气体逸出。
23.气动锁紧机构5设置有两组,且两组气动锁紧机构5规格相同,两组气动锁紧机构5对称设置于铝合金缸体2左右两侧,该设计通过两组气动锁紧机构5提高了对机械爪4的锁紧稳定性。
24.连接卡座571安装于锁紧顶杆57与机械爪4连接处,连接卡座571规格与锁紧顶杆57规格相匹配,锁紧顶杆57通过连接卡座571与机械爪4固定连接,定位支撑套筒55内径与气动套筒56直径相同,紧固螺栓551设置于定位支撑套筒55与气动套筒56连接处,紧固螺栓551贯穿定位支撑套筒55与气动套筒56通过螺纹固定连接,通过紧固螺栓551能够对气动套筒56进行安装固定。
25.作为本实用新型的一个实施例:工作人员首先将气动软管53与外界气泵相连接,再将电磁铁521通过导线与外界电源相连接,并使电磁铁521处于通电开启状态,当机械爪4对物体进行抓持时,通过气动软管53向气动套筒56内部充气,气体充满气动套筒56,气体在气动套筒56内部对气动挡板54产生一个向机械爪4方向的压力,进而将锁紧顶杆57向机械爪4方向推动,通过锁紧顶杆57对机械爪4进行顶压,从而实现了对机械爪4的锁紧,防止机械爪4产生松动;当突发断电时,气动软管53停止向气动套筒56内部输送气体,同时电磁铁521失电内部磁性消失,电磁铁521对定位支杆522不产生作用力,定位支杆522在复位压缩弹簧524的反向弹力作用下快速的向下移动,通过定位支杆522带动密封卡板527向下移动,使密封卡板527卡入定位卡槽529中,通过密封卡板527对通气孔528进行密封,使气动套筒56内部的气体不会逸出,进而使得机械爪4保持断电前的状态。
26.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
27.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1