水下机器人打捞机械爪及其夹爪的制作方法
1.本实用新型涉及水下作业技术领域,特别是一种水下机器人打捞机械爪。
背景技术:
2.在水下打捞作业,一般需由深水区夹持目标物后打捞至陆地上。一般机械爪的夹持轨迹以其铰接点为中心相互迫近并接触夹持,在夹持扁平状目标物时,只有爪子凸缘点位置受力,受力面较小,需要很大的夹持力才能夹住目标物,难于稳定夹持。
技术实现要素:
3.本实用新型的发明目的是,针对上述问题,提供了一种水下机器人打捞机械爪,夹钳组件逐渐向内平移并夹持,夹持面较大并平行接触,能够平稳夹住目标物。
4.为达到上述目的,本实用新型所采用的技术方案是:
5.水下机器人打捞机械爪,包括配置于机器人的推进臂及夹爪本体,夹爪本体包括连接件、支架、连杆组件、传动组件及夹钳组件;支架的后端设置有连接件,以使得支架能够连接在推进臂上;支架的前端的两侧位置分别通过连杆组件铰接有夹钳组件,连杆组件包括平行连杆及传动连杆,且平行连杆及传动连杆的两端的铰接点的连线组成平行四边形状;传动连杆的后端的铰接点处设置有传动组件,且传动组件能够可拆卸连接在推进臂的推进丝杆上,以使得齿轮连杆在推进丝杆推动作用下能够转动。
6.其中,推进臂包括推进丝杆、铰头、电机、电池及主腔体;铰头及电机设置于主腔体内,电机经铰头带动推进丝杆转动;电池设置于主腔体内且位于主腔体的后端,电机及铰头位于主腔体的前端,主腔体的前端设置有机体前堵头,主腔体的后端设置有尾部堵头,连接件连接在机体前堵头上。
7.如上述,在推进臂上连接有夹爪本体,在推进丝杆推动作用下传动连杆转动,带动夹钳组件逐渐向内迫近,而传动连杆与平行连杆在转动过程中始终保持平行设置,夹钳组件逐渐向内平移并夹持,夹持面较大并平行接触,能够平稳夹住目标物。
8.作为一选项,夹钳组包括爪梁,爪梁的后端呈由前至后方向向外倾斜,且倾斜角a为30
°‑
60
°
,使得其上的平行连杆及传动连杆的铰接点的连线与爪梁的夹持面夹角为a,优选为45
°
,如此,两个爪梁的夹持开口适中,适用范围较广;且,支架的板面呈梯形状,其侧边倾斜角度与爪梁的后端相同,使其外缘在装配时相互平行,避免在转动时边角凸出形成阻碍;且,爪梁由两块爪板以一定间距夹层设置而成,平行连杆及传动连杆的前端分别铰接于两块爪板之间,如此施力点在其中部位置,利于爪梁两侧均衡施力。
9.作为一选项,夹钳组还包括钳口件及硅胶套,钳口件设置于爪梁的前端,且其内侧夹持壁面设置有齿槽横向贯通的锯齿部,如此,利用钳口件固定形成平稳夹持面,并在夹持面处设置锯齿部,起到防滑作用,还具有较强咬合作用,利于稳定咬住目标物;且硅胶套可拆卸套装在钳口件上,且其覆盖锯齿部,起到缩小夹持厚度、缓冲及防滑作用,便于夹持较薄目标物,利于稳定咬住目标物。
10.作为一选项,传动组件包括齿轮及齿条,传动连杆的后端的铰接点处设置有齿轮,齿条咬合连接于两个传动连杆的齿轮之间,且齿条能够可拆卸连接在推进丝杆上,以使得齿条在推进丝杆推动作用下向前/向后移动,利用齿条作为缓冲,在装配时可以调整其位置,便于与推进丝杆连接。优选地,齿条能够螺纹连接在推进丝杆上,以使得齿条在推进丝杆正转/反转情形下向前/向后移动,可直接利用推进丝杆转动作用实现装配,便于拆装。
11.由于采用上述技术方案,本实用新型具有以下有益效果:
12.本实用新型的水下机器人打捞机械爪,在推进臂上连接有夹爪本体,在推进丝杆推动作用下传动连杆转动,带动夹钳组件逐渐向内迫近,而传动连杆与平行连杆在转动过程中始终保持平行设置,夹钳组件逐渐向内平移并夹持,夹持面较大并平行接触,能够平稳夹住目标物。采用两组夹钳组件设计,使其开口较大,同时两侧施力利于均衡施力夹持。
附图说明
13.图1是本实用新型的打捞机械爪结构示意图。
14.图2是图1的侧视结构示意图。
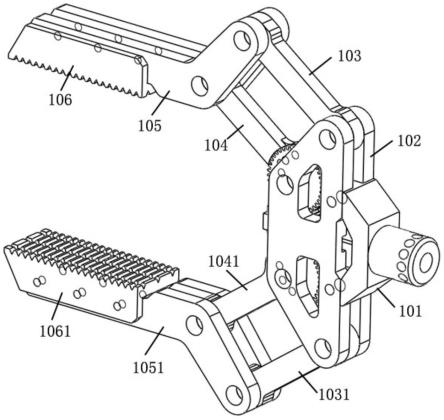
15.图3是本实用新型的夹爪本体结构示意图。
16.图4是图3的另一视角结构示意图。
17.图5是图3的又一视角结构示意图。
18.图6是图3的侧视结构示意图。
19.图7是本实用新型的推进臂结构示意图。
20.图8是图7的局部结构示意图。
21.附图中,100、夹爪本体,101、连接件,102、支架,103、平行连杆,104、传动连杆,105、爪梁,106、钳口件,200、推进臂,201、推进丝杆,202、机前堵头,203、主腔体,204、六角螺柱,205、铰头,206、电机,207、电池,208、尾部堵头。
具体实施方式
22.实施例1
23.参见图2,图示左侧为前方,右侧为后方,纸面里外方向为横向。
24.参见图1-图8,本实施例的水下机器人打捞机械爪,包括配置于机器人的推进臂200及夹爪本体100,夹爪本体100包括连接件101、支架102、连杆组件、传动组件及夹钳组件;支架102的后端设置有连接件,以使得支架能够连接在推进臂上;支架102的前端的两侧位置分别通过连杆组件铰接有夹钳组件,连杆组件包括平行连杆103及传动连杆104,且平行连杆及传动连杆的两端的铰接点的连线组成平行四边形状;传动连杆的后端的铰接点处设置有传动组件,且传动组件能够可拆卸连接在推进臂的推进丝杆上,以使得齿轮连杆在推进丝杆推动作用下能够转动。
25.其中,推进臂200包括推进丝杆201、铰头205、电机206、电池207及主腔体203;铰头及电机设置于主腔体内,电机206经铰头205配合六角螺柱204连接推进丝杆201,以带动推进丝杆转动;电池设置于主腔体内且位于主腔体的后端,电机及铰头位于主腔体的前端,主腔体的前端设置有机体前堵头,主腔体的后端设置有尾部堵头,连接件可配合螺栓连接在机体前堵头上。推进丝杆采用周向转动推进方式,相对于轴向移动推进方式,不用收回主腔
体内,减少占用主腔体空间。配合垫圈等,机前堵头及尾部堵头可将主腔体密封。电池用于给电机供电,电机采用步进电机准确控制正反转,当然也可采用导线连接至机器人本体电源处。夹爪本体可采用铝合金或不锈钢材质等制成,电池可采用锂电池,电池及电机连接及控制,等,推进臂各部件均可采用既有技术实现,在此不再赘述。
26.夹钳组包括爪梁105,且,爪梁由两块爪板以一定间距夹层设置而成,平行连杆103及传动连杆104的前端分别铰接于两块爪板之间,如此铰接施力点在其中部位置,利于爪梁两侧均衡施力,同时起到保护铰接点作用。同理,支架可采用两个板架夹层设置而成。
27.传动组件包括齿轮107及齿条108,传动连杆的后端的铰接点处设置有齿轮,齿条咬合连接于两个传动连杆的齿轮之间,且齿条能够可拆卸连接在推进丝杆上,以使得齿条在推进丝杆推动作用下向前/向后移动,利用齿条作为缓冲,在装配时可以调整其位置,便于与推进丝杆连接。优选地,齿条能够螺纹连接在推进丝杆上,以使得齿条在推进丝杆正转/反转情形下向前/向后移动,如推进丝杆正转推动齿条向前移动,相对于卡扣连接,该螺纹连接结构可直接利用推进丝杆转动作用实现装配,便于拆装。
28.如上述,在推进臂上连接有夹爪本体,在推进丝杆推动作用下传动连杆转动,带动夹钳组件逐渐向内迫近,而传动连杆与平行连杆在转动过程中始终保持平行设置,夹钳组件逐渐向内平移并夹持,夹持面较大并平行接触,能够平稳夹住目标物。采用两组夹钳组件设计,使其开口较大,同时两侧施力利于均衡施力夹持。
29.作为一选项,基于前述实例,在一实例中,爪梁105的后端呈由前至后方向向外倾斜,且倾斜角a为30
°‑
60
°
,使得其上的平行连杆及传动连杆的铰接点的连线与爪梁的夹持面夹角为a,优选为45
°
,如此,两个爪梁的夹持开口适中,适用范围较广;且,支架的板面呈梯形状,其侧边倾斜角度与爪梁的后端相同,使其外缘在装配时相互平行,避免在转动时边角凸出形成阻碍
30.作为一选项,基于前述实例,在一实例中,夹钳组还包括钳口件106,钳口件设置于爪梁的前端,且其内侧夹持壁面设置有齿槽横向贯通的锯齿部,如此,利用钳口件固定形成平稳夹持面,并在夹持面处设置锯齿部,起到防滑作用,还具有较强咬合作用,利于稳定咬住目标物。优选地,u型状钳口件开口处固定于爪梁两侧,利于稳固连接。
31.作为一选项,基于前述实例,在一实例中,夹钳组还包括硅胶套,硅胶套可拆卸套装在钳口件上,且其覆盖锯齿部,起到缩小夹持厚度、缓冲及防滑作用,便于夹持较薄目标物,利于稳定咬住目标物。如硅胶套呈指套状结构,可直接利用其弹性实现套装。
32.实施例2
33.参见图1-图6,本实施例的水下机器人打捞机械爪的夹爪,主要用于配置于水下机器人推进臂使用,其包括连接件101、支架102、连杆组件、传动组件及夹钳组件;支架102的后端设置有连接件,以使得支架能够连接在机器人推进臂上;支架102的前端的两侧位置分别通过连杆组件铰接有夹钳组件,连杆组件包括平行连杆103及传动连杆104,且平行连杆及传动连杆的两端的铰接点的连线组成平行四边形状;传动连杆的后端的铰接点处设置有传动组件,且传动组件能够可拆卸连接在推进臂的推进丝杆上,以使得齿轮连杆在推进丝杆推动作用下能够转动。
34.其中,夹钳组包括爪梁105,且,爪梁由两块爪板以一定间距夹层设置而成,平行连杆103及传动连杆104的前端分别铰接于两块爪板之间,如此铰接施力点在其中部位置,利
于爪梁两侧均衡施力,同时起到保护铰接点作用。同理,支架可采用两个板架夹层设置而成。
35.传动组件包括齿轮107及齿条108,传动连杆的后端的铰接点处设置有齿轮,齿条咬合连接于两个传动连杆的齿轮之间,且齿条能够可拆卸连接在推进丝杆上,以使得齿条在推进丝杆推动作用下向前/向后移动,利用齿条作为缓冲,在装配时可以调整其位置,便于与推进丝杆连接。优选地,齿条能够螺纹连接在推进丝杆上,以使得齿条在推进丝杆正转/反转情形下向前/向后移动,如推进丝杆正转推动齿条向前移动,相对于卡扣连接,该螺纹连接结构可直接利用推进丝杆转动作用实现装配,便于拆装。
36.如上述,在推进丝杆推动作用下传动连杆转动,带动夹钳组件逐渐向内迫近,而传动连杆与平行连杆在转动过程中始终保持平行设置,夹钳组件逐渐向内平移并夹持,夹持面较大并平行接触,能够平稳夹住目标物。
37.作为一选项,基于前述实例,在一实例中,爪梁105的后端呈由前至后方向向外倾斜,且倾斜角a为30
°‑
60
°
,使得其上的平行连杆及传动连杆的铰接点的连线与爪梁的夹持面夹角为a,优选为45
°
,如此,两个爪梁的夹持开口适中,适用范围较广;且,支架的板面呈梯形状,其侧边倾斜角度与爪梁的后端相同,使其外缘在装配时相互平行,避免在转动时边角凸出形成阻碍
38.作为一选项,基于前述实例,在一实例中,夹钳组还包括钳口件106,钳口件设置于爪梁的前端,且其内侧夹持壁面设置有齿槽横向贯通的锯齿部,如此,利用钳口件固定形成平稳夹持面,并在夹持面处设置锯齿部,起到防滑作用,还具有较强咬合作用,利于稳定咬住目标物。优选地,u型状钳口件开口处固定于爪梁两侧,利于稳固连接。
39.作为一选项,基于前述实例,在一实例中,夹钳组还包括硅胶套,硅胶套可拆卸套装在钳口件上,且其覆盖锯齿部,起到缩小夹持厚度、缓冲及防滑作用,便于夹持较薄目标物,利于稳定咬住目标物。如硅胶套呈指套状结构,可直接利用其弹性实现套装。
40.需要指出的是,上述实施例1及实施例2的各个实例中,各个部件的连接可据常规选用焊接、螺纹连接及粘接等既有方式;上述实施例1及实施例2的实例可以根据实际需要优选一个或两个以上相互组合,而多个实例采用一套组合技术特征的附图说明,在此就不一一展开说明;实施例2只是作了简要说明,未尽之处请参见前述实施例1。
41.需要说明的是,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。
42.上述说明是针对本实用新型较佳可行实施例的详细说明和例证,但这些描述并非用以限定本实用新型所要求保护范围,凡本实用新型所提示的技术教导下所完成的同等变化或修饰变更,均应属于本实用新型所涵盖专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1