一种新型机械大臂的制作方法
1.本实用新型涉及机械手技术领域,尤其涉及一种新型机械大臂。
背景技术:
2.在日新月异的物质文明时代,产品不断更新换代,人类为解决劳动力紧缺提高生产效率,常常采用机械设备代替人力劳动。
3.机械手是自动化机械里常见的设备,一般为多个手臂搭配多个转轴组成。机械臂一般为一体浇铸式,其中大臂是支撑整个机械手臂运动的关键部位,当机械臂缺少加强结构时容易导致机械臂运作强度不高,为了进一步提高机械臂的强度一般采用浇铸管式,但在生产过程中管式浇铸需要采用砂芯进行生产,加工时长增加,导致生产成本过高的问题,同时采用浇铸管式的机械臂需要在外部设置加强结构,影响机械臂美观。
技术实现要素:
4.本实用新型的发明目的在于提供一种新型机械大臂,包括一侧开设有空腔的臂体、盖合于所述空腔的盖板、以及形成于所述臂体上相对于所述空腔的另一侧的第一套筒和第二套筒,所述第一套筒和所述第二套筒位于所述臂体的两端,所述空腔的底部设置有若干条相互交错的加强筋。
5.优选的,所述第一套筒内设置有贯穿于所述臂体的定位组件。
6.优选的,所述空腔内对应所述第二套筒形成有凸台,所述凸台上开设有若干个连通于所述第二套筒的定位孔。
7.优选的,于所述臂体上沿所述空腔的边缘开设有用于安装所述盖板的阶梯槽,所述阶梯槽的底部开设有若干个第一安装孔,所述盖板的边缘对应所述第一安装孔开设有第二安装孔。
8.优选的,所述臂体上设置有贯穿于所述盖板的定位环,所述定位环用于固定信号线缆。
9.优选的,所述空腔底部形成有供所述定位环安装的圆孔。
10.优选的,所述圆孔贯穿于所述加强筋。
11.优选的,所述定位组件包括若干个贯穿于所述臂体的螺栓。
12.由上可知,应用本实用新型提供的新型机械大臂可以得到以下有益效果:
13.1、在臂体上开设空腔,通过半封闭的臂体结构,避免了臂体加工过程中砂芯的投入,提高,达到减少生产成本的效果;
14.2、通过空腔的底部设置加强筋,在不改变臂体外部结构的同时,提高了臂体的强度;
15.3、通过盖板盖合空腔,实现臂体内部防尘防油的效果,同时达到了美观的作用。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对本实用新型实施例或现有技术的描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本实用新型的一部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
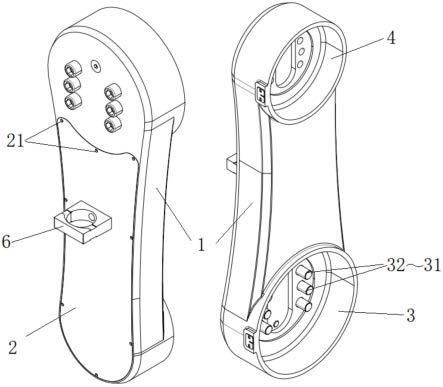
17.图1为本实用新型实施例新型机械大臂示意图;
18.图2为本实用新型实施例新型机械大臂空腔示意图;
19.附图标记:1臂体、2盖板、3第一套筒、4第二套筒、5加强筋、11、空腔、 31定位组件、32螺栓、12凸台、13定位孔、14阶梯槽、141第一安装孔、21 第二安装孔、6定位环、15圆孔。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.目前市场上机械手大臂采用一体浇铸管式,需要采用砂芯进行生产,导致生产成本过高的问题。
22.为了解决上述技术问题,本实施例提供一种新型机械大臂,具体结构特征如下:
23.如图1-2所示,包括一侧开设有空腔11的臂体1、盖合于空腔11的盖板2;以及形成于臂体1上相对于空腔11另一侧的第一套筒3和第二套筒4,第一套筒 3和第二套筒4位于臂体1的两端,空腔11的底部设置有若干条相互交错的加强筋5。
24.如图2所示,为了方便机械臂,在臂体1的一侧开设有空腔11,通过通过空腔11使臂体1形成半封闭结构,在臂体1浇铸成型的过程中,避免了一般管式浇铸时内部砂芯的使用,提高了生产效率,达到减少生产工序和生产成本的效果。
25.为了提高臂体1的强度,在空腔11的底部设置有若干条加强筋5,令加强筋5在空腔11内相互交错,达到避免空腔11段强度不足的效果。
26.进一步的,为了臂体1内部防尘防油,如图1所示在臂体1上设置有盖合空腔11的盖板2,通过盖板2盖合达到防止粉尘油污进入空腔11内,造成清洗不便的问题,同时盖合盖板2后有利于臂体1的涂漆和掩盖加强筋5,达到美观的作用。
27.为了安装盖板2,如图2所示在臂体1上沿空腔11的边缘开设有阶梯槽14,通过盖板2覆盖在阶梯槽14上,达到盖合空腔11的作用,同时避免了盖板2在臂体1凸起;为了进一步固定盖板2,阶梯槽14的底部开设有若干个环绕于空腔 11第一安装孔141,同时盖板2的边缘对应第一安装孔141开设有第一安装孔 141,通过第一安装孔141和第一安装孔141进行螺纹连接,达到固定盖板2的作用。
28.如图1所示,为了实现臂体1的旋转,在臂体1的两端形成的第一套筒3和第二套筒4,通过第一套筒3和第二套筒4分别套设在对应的转轴上,达到臂体 1旋转的效果,为了方便盖板2安装,令第一套筒3和第二套筒4位于臂体1上相对于空腔11的另一侧。
29.为了臂体1和转轴固定,如图1所示在第一套筒3内且贯穿于所述臂体1设置的定位组件2,包括6个呈阵列分布的螺栓32,通过螺栓32使第一套筒3与转轴固定连接,达到实现
臂体1旋转的效果。
30.为了进一步实现臂体1多轴旋转,如图2所示空腔11内对应第二套筒4形成有凸台12,通过方便第二套筒4套设在转轴上,实现臂体1的多轴旋转;同时为了固定臂体1和第二套筒4对应的转轴,凸台12上开设有若六个连通于第二套筒4的定位孔13,通过定位孔13使臂体1与转轴进行螺纹连接,实现了和第二套筒4对应的转轴固定。
31.通过空腔11内形成凸台12,以令盖板2覆盖定位孔13,达到防护和进一步美观的效果。
32.如图1所示,为了固定机械臂上的信号线缆,如图2所示在臂体1上设置有贯穿于盖板2的定位环6,通过线缆穿过定位环6,达到线缆贴合臂体1固定的作用;为了安装定位环6,在空腔11底部设置有圆孔15,通过定位环6穿过盖板2与圆孔15连接,达到固定定位环6的作用。
33.同时,为了提高定位环6的抗拉强度,令圆孔15贯穿于加强筋5,令定位环 6与加强筋5连接,提高定位环6在臂体1上的抗拉强度,在臂体1搬运的过程中,定位环6可起到吊环的作用,通过定位环6连接于加强筋5,达到搬运臂体 1过程中防止臂体1变形的效果。
34.根据上述新型机械大臂,在臂体1上开设空腔11,通过半封闭的臂体1结构,避免了臂体1加工过程中砂芯的投入,达到减少生产成本的效果;通过空腔11 的底部设置加强筋5,在不改变臂体1外部结构的同时,提高了臂体1的强度;通过盖板2盖合空腔11,实现臂体1内部防尘防油的效果,同时达到了美观的作用。
35.以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同替换和改进等,均应包含在该技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1