一种通用的橡胶件自动安装设备的制作方法
1.本实用新型涉及线束组装设备领域,更具体地,涉及一种通用的橡胶件自动安装设备。
背景技术:
2.汽车线束的橡胶件是为了保护线束,防止钣金对线束造成损坏、防止室外水流入室内以及隔离发动机舱内噪音传递到驾驶室内,但是线束厂家在生产时由于穿过橡胶件线材根数过多,通常会在线束包扎完成后再进行橡胶件的组装,这些厂家在组装橡胶件的时候会使用撑开钳或者简单的橡胶件撑开设备(如气动扩孔机)及相关的装配治具配合使用,且在橡胶件装配完成后还需要通过治具取下线束,有时候因操作不当会造成线束损伤,将包扎好的线束损坏,橡胶件的位置不准确或橡胶件安装错误,偏差较大,并且由于人工作业,安装、取放线束易出现风险,危险性较高。目前,需要一种能够精准定位橡胶件在线束上的位置和方向,能自动将橡胶件撑开以安装线束,防止橡胶件安装错误并能够适用于多种橡胶件自动安装的一体化设备。
技术实现要素:
3.本实用新型提供一种一种通用的橡胶件自动安装设备,包括操作台以及在所述操作台上依次设置的橡胶件移动部和橡胶件扩张部,其中:
4.所述橡胶件移动部包括橡胶件仿形模、第一滑轨和第一气缸,所述第一气缸的输出端与所述橡胶件仿形模连接,所述橡胶件仿形模用于固定橡胶件;
5.所述橡胶件扩张部包括用于扩张橡胶件的扩张件及控制所述扩张件收缩或扩张的驱动装置;
6.所述橡胶件仿形模在所述第一气缸的带动下沿所述第一滑轨向所述橡胶件扩张部移动,并将所述扩张件插入到所述橡胶件的扩张口中。
7.可选地,所述橡胶件移动部还包括连接附件,所述连接附件的一端连接所述橡胶件仿形模,另一端与所述第一气缸的输出端连接。
8.可选地,所述扩张件由四个卡爪构成,所述驱动装置控制所述卡爪运动以使所述扩张件收缩或扩张。
9.可选地,所述驱动装置包括分别与每个所述卡爪连接的四个连杆,每个所述连杆的另一端与伺服电缸的输出端连接,所述伺服电缸驱动所述连杆带动所述卡爪运动。
10.可选地,还包括端子固定部,所述端子固定部包括第二气缸、第二滑轨和设置在所述第二滑轨上的端子仿形模,所述端子仿形模与所述第二滑轨活动连接,将端子安装在所述端子仿形模上并通过所述第二气缸压紧固定。
11.可选地,所述端子固定部还包括定位螺栓,所述端子仿形模底座通过所述定位螺栓与所述第二滑轨活动连接。
12.可选地,还包括线束固定部,所述线束固定部包括线束底座和压钳,用于固定线
束。
13.可选地,所述线束底座上包括导线槽,所述导线槽沿所述橡胶件扩张部至所述端子固定部的方向设置,所述线束放置于所述导线槽内并利用所述压钳压紧。
14.可选地,所述橡胶件仿形模上还包括上挡板,防止橡胶件与所述橡胶件仿形模脱离。
15.可选地,还包括第一传感器,所述第一传感器设置在所述扩张件下方并与所述第一气缸连接,所述第一气缸接收所述第一传感器的信号后停止移动所述橡胶件仿形模。
16.可选地,还包括第二传感器,所述第二传感器设置在所述橡胶件仿形模的初始位置并与所述第二气缸连接,安装结束后,所述橡胶件仿形模返回至所述初始位置,所述第二气缸接收所述第二传感器的信号后松开所述端子仿形模。
17.可选地,还包括第三传感器,所述橡胶件仿形模上设有第一防错标记,所述第三传感器用于识别所述第一防错标记。
18.可选地,还包括第四传感器,所述端子仿形模上设有第二防错标记,所述第四传感器用于识别所述第二防错标记。
19.本实用新型能够精准定位橡胶件在线束上的位置和方向,能自动将橡胶件撑开以安装线束,防止橡胶件安装错误并能够适用于多种橡胶件自动安装。
20.通过以下参照附图对本实用新型的示例性实施例的详细描述,本实用新型的其它特征及其优点将会变得清楚。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
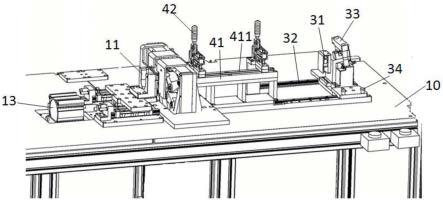
22.图1为本实用新型通用的橡胶件自动安装设备的示意图;
23.图2为本实用新型橡胶件自动安装设备中驱动装置的示意图;
24.图3为本实用新型扩张件收缩状态的示意图;
25.图4为本实用新型扩张件扩张状态的示意图。
26.图中标示如下:
27.11、橡胶件仿形模;13、第一气缸;21、卡爪;22、驱动装置;221、连杆;222、伺服电缸;31、端子仿形模;32、第二滑轨;33、第二气缸;34、定位螺栓;41、线束底座;411、导线槽;42、压钳。
具体实施方式
28.现在将参照附图来详细描述本实用新型的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。
29.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。
30.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
31.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
33.本实用新型提供一种通用的橡胶件自动安装设备,如图1所示,包括操作台以及在操作台上依次设置的橡胶件移动部和橡胶件扩张部,其中:
34.橡胶件移动部包括橡胶件仿形模11、第一滑轨和第一气缸13,第一气缸13的输出端与橡胶件仿形模11连接,橡胶件仿形模11用于固定橡胶件;
35.橡胶件扩张部包括用于扩张橡胶件的扩张件及控制扩张件收缩或扩张的驱动装置22;
36.橡胶件仿形模11在第一气缸13的带动下沿第一滑轨(图中未示出)向橡胶件扩张部移动,并将扩张件插入到橡胶件的扩张口中。
37.本实用新型能够精准定位橡胶件在线束上的位置和方向,能自动将橡胶件撑开以安装线束,防止橡胶件安装错误并能够适用于多种橡胶件自动安装。
38.在一些实施例中,橡胶件移动部还包括连接附件(图中未示出),连接附件的一端连接橡胶件仿形模11,另一端与第一气缸13的输出端连接。不同的橡胶件对应使用不同的橡胶件仿形模11,可以实现自动安装多种橡胶件的功能,并且,在橡胶件仿形模11上设有上挡板,上挡板的作用是防止橡胶件从橡胶件仿形模11中脱离。将橡胶件固定在橡胶件仿形模11上后,可以手动推动连接附件将橡胶件仿形模11移动到预装位置。预装完成后,第一气缸13连接附件将橡胶件仿形模11固定。
39.在一些实施例中,扩张件由四个卡爪21构成,驱动装置22控制卡爪21运动以使扩张件收缩或扩张,如图2所示为驱动装置的示意图。处于收缩状态的扩张件伸入橡胶件需要扩张的扩张口处,将橡胶件仿形模11固定,然后通过驱动装置22控制扩张件扩张,橡胶件即被扩张到可以安装的状态,如图3所示为收缩状态的扩张件。
40.在一些实施例中,驱动装置22包括分别与每个卡爪21连接的四个连杆221,每个连杆221的另一端与伺服电缸222的输出端连接,伺服电缸222驱动连杆221带动卡爪21运动。扩张件的每个卡爪21均连接一个连杆221,每个连杆221的另一端与伺服电缸222的输出端连接,伺服电缸222通过四个连杆221带动四个卡爪21运动,使扩张件扩张,安装在线束上,如图4所示为扩张状态下的扩张件示意图。
41.在一些实施例中,还包括端子固定部,端子固定部包括第二气缸33、第二滑轨32和设置在第二滑轨32上的端子仿形模31,端子仿形模31与第二滑轨32活动连接,将端子安装在端子仿形模31上并通过第二气缸33压紧固定。如图1所示,端子仿形模31设置在第二滑轨32上,可以沿第二滑轨32移动,用于调整不同长度的线束,将线束一端伸入橡胶件仿形模11,另一端的端子固定在端子仿形模31中,安装不同的线束时,使用不同的端子仿形模31以适应不同的端子,可以实现在多种线束上安装橡胶件的功能。
42.在一些实施例中,端子固定部还包括定位螺栓34,端子仿形模31底座通过定位螺栓34与第二滑轨32活动连接。端子仿形模31可以在第二滑轨32上滑动以适应不同长度的线
束,将线束一端的端子固定在端子仿形模31上以后,拉直线束后,利用定位螺栓34将端子仿形模31固定在第二滑轨32上,使线束保持拉直状态进行橡胶件的安装。
43.在一些实施例中,还包括线束固定部,线束固定部包括线束底座41和压钳42,用于固定线束。如图1所示,线束固定部设置在橡胶件扩张部和端子固定部之间,用于支撑和固定线束。
44.在一些实施例中,线束底座41上包括导线槽411,导线槽411沿橡胶件扩张部至端子固定部的方向设置,线束放置于导线槽411内并利用压钳42压紧。如图1所示,导线槽411可以更好的和压钳42配合固定线束,避免线束在安装橡胶件的过程中转动或脱落。
45.在一些实施例中,橡胶件仿形模11上还包括上挡板,防止橡胶件与橡胶件仿形模11脱离。将橡胶件安装在线束上,橡胶件仿形模11前后运动控制橡胶件移动,在橡胶件仿形模11上设置上挡板,避免在移动过程中橡胶件与橡胶件仿形模11脱离。
46.在一些实施例中,还包括第一传感器,第一传感器设置在扩张件下方并与第一气缸13连接,第一气缸13接收第一传感器的信号后停止移动橡胶件仿形模11。橡胶件安装在橡胶件仿形模11上以后,第一气缸13推动连接附件向前移动,带动橡胶件仿形模11运动,当第一传感器感应到橡胶件仿形模11运动到安装位置时向第一气缸13发出信号,第一气缸13停止移动橡胶件仿形模11,并将橡胶件仿形模11固定等待橡胶件安装。
47.在一些实施例中,还包括第二传感器,第二传感器设置在橡胶件仿形模11的初始位置并与第二气缸33连接,安装结束后,橡胶件仿形模11返回至初始位置,第二气缸33接收第二传感器的信号后松开端子仿形模31。橡胶件安装结束后将端子从端子仿形模31中取下,打开压钳42,从线束固定部中取下已安装成功橡胶件的线束。
48.在一些实施例中,还包括第三传感器,橡胶件仿形模11上设有第一防错标记,第三传感器用于识别第一防错标记。第三传感器用于识别橡胶件仿形模11上的第一防错标记,避免使用错误的橡胶件仿形模11导致无法安装橡胶件。
49.在一些实施例中,还包括第四传感器,端子仿形模31上设有第二防错标记,第四传感器用于识别第二防错标记。第四传感器用于识别端子仿形模31上的第二防错标记,保证将橡胶件安装在对应的线束上。通过设置第一防错标记和第二防错标记以及对应的第三传感器和第四传感器,保证了橡胶件与线束的一一对应,避免橡胶件安装有误,提高了安装的准确率。
50.在一些实施例中,还包括控制器,第一气缸13、第二气缸33、伺服电缸222、第一传感器、第二传感器、第三传感器和第四传感器均与控制器电连接,通过控制器控制整个橡胶件安装设备完成自动安装橡胶件的工序。
51.虽然已经通过例子对本实用新型的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本实用新型的范围。本领域的技术人员应该理解,可在不脱离本实用新型的范围和精神的情况下,对以上实施例进行修改。本实用新型的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1