肩背式双臂控制装置以及医疗设备的制作方法
1.本实用新型涉及机器人领域,具体涉及肩背式双臂控制装置以及医疗设备。
背景技术:
2.仿生机器人包括跟人上臂相近的结构,在进行远程控制时,较难进行可靠的精细化操作。
技术实现要素:
3.本实用新型针对上述问题,提出了肩背式双臂控制装置以及医疗设备。
4.本实用新型采取的技术方案如下:
5.一种肩背式双臂控制装置,包括:
6.肩包式控制器本体,具有背带,肩包式控制器本体的下端具有向外侧延伸的控制底座;
7.多关节手臂,第一端转动安装在所述控制底座上;
8.仿生控制手,转动安装在所述多关节手臂的第二端;
9.显示器支臂,第一端转动安装在所述控制底座上;以及
10.显示器,转动安装在显示器支臂的第二端,与所述肩包式控制器本体信号连接;
11.所述仿生控制手包括主控端手掌、4个三关节控制手指以及1个二关节控制手指;所述主控端手掌转动安装在所述多关节手臂的第二端,所述三关节控制手指包括依次转动连接的第一指节、第二指节和第三指节,其中,第一指节的第一端与所述主控端手掌转动连接,第二端与第二指节的第一端转动连接,第二指节的第二端与第三指节转动连接;所述二关节控制手指包括依次转动连接的第一指节和第二指节,其中,第一指节的第一端与所述主控端手掌转动连接,第二端与第二指节转动连接;所述第一指节、第二指节和第三指节均具有供手指穿入的限位环;各指节的转动处均安装有角度传感器,所述角度传感器与所述肩包式控制器本体信号连接。
12.本技术的肩背式双臂控制装置用于控制仿生机器人,可以背在身上进行操作,通过仿生控制手的设计,能够将人手指各关节的转动动作转化为控制信号,从而进行精细化操作。
13.于本实用新型其中一实施例中,所述多关节手臂上安装有位置传感器,所述位置传感器与所述肩包式控制器本体信号连接。
14.于本实用新型其中一实施例中,所述肩包式控制器本体包括电路组件以及供电元件,所述电路组件具有无线信号通信模块。
15.通过无线信号通信模块能够实现对仿生机器人进行远程控制。
16.于本实用新型其中一实施例中,所述控制底座、多关节手臂以及仿生控制手均具有两组。
17.本技术还公开了一种医疗设备,包括医疗机器人以及上文所述的肩背式双臂控制
装置,所述医疗机器人包括:
18.机器人本体;
19.药剂仓,设置在所述机器人本体内;
20.中空的多轴关节,第一端与所述机器人本体连接;
21.仿生手,安装在所述多轴关节的第二端,所述仿生手包括手掌部以及多个手指关节组件,所述手掌部具有出药通道;
22.连接管,穿设在所述多轴关节的中空部分,一端与所述药剂仓连接,另一端与所述出药通道连通;
23.输送泵,用于将药剂仓内的药剂通过所述连接管输送至喷药组件;
24.探测机构,安装在所述机器人本体上,所述探测机构包括激光雷达以及摄像头;
25.所述仿生手包括5个手指关节组件,其中四个为三关节组件,第五个为二关节组件;所述三关节组件包括依次转动连接的第一关节、第二关节和第三关节,其中,第一关节的第一端通过舵机与所述手掌部连接,第二端通过舵机与第二关节的第一端连接,第二关节的第二端通过舵机与第三关节的第一端连接;所述二关节组件包括依次转动连接的第一关节和第二关节,其中,第一关节的第一端通过舵机与所述手掌部连接,第二端通过舵机与第二关节的第一端连接;
26.所述机器人本体具有控制电路,所述控制电路具有与所述肩背式双臂控制装置的无线信号通信模块通讯的通讯模块,控制电路根据接收到的控制信号控制医疗机器人工作。
27.这种结构,使得在进行控制时,能够根据手指关节的角度,精确控制仿生手像人手动作(通过控制舵机的转动实现)。
28.于本实用新型其中一实施例中,所述医疗机器人还包括第一转动电机,所述探测机构转动安装在机器人本体的上方,所述第一转动电机用于驱动所述探测机构转动;所述探测机构包括转动安装在所述机器人本体上方的头部支座、转动安装在头部支座上的机器头以及用于驱动所述机器头俯仰变化的头部驱动元件;所述激光雷达和摄像头安装在所述机器头上,所述头部支座的转动轴线与机器头的转动轴线相互垂直。
29.于本实用新型其中一实施例中,还包括移动平台,所述医疗机器人安装在所述移动平台上。
30.于本实用新型其中一实施例中,所述医疗机器人还包括安装盘以及第二转动电机,所述机器人本体转动安装在所述安装盘上,所述第二转动电机用于驱动机器人本体相对安装盘俯仰转动,所述安装盘用于固定在所述移动平台上。
31.这样设置,医疗机器人自身也能进行俯仰操作,调节形式多样,适用性强。
32.本实用新型的有益效果是:本技术的肩背式双臂控制装置用于控制仿生机器人,可以背在身上进行操作,通过仿生控制手的设计,能够将人手指各关节的转动动作转化为控制信号,从而进行精细化操作。
附图说明
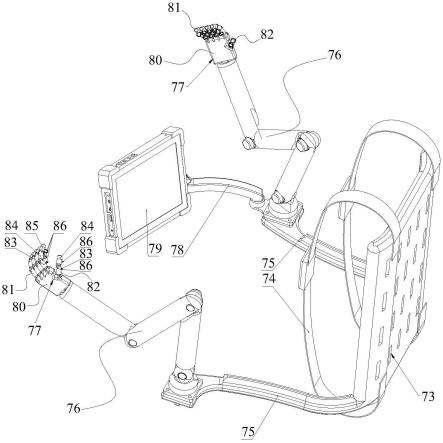
33.图1是肩背式双臂控制装置的结构示意图;
34.图2是医疗机器人的结构示意图;
35.图3是仿生手的示意图;
36.图4是医疗机器人的局部爆炸图;
37.图5是医疗设备的结构示意图;
38.图6是探测机构和第一转动电机的示意图。
39.图中各附图标记为:
40.1、移动平台;50、医疗机器人;51、机器人本体;52、药剂仓;53、多轴关节;54、仿生手;55、连接管;56、输送泵;57、药剂罐;58、注水罐;59、探测机构;60、激光雷达;61、摄像头;62、第一转动电机;63、手掌部;64、出药通道;65、三关节组件;66、二关节组件;67、第一关节;68、第二关节;69、第三关节;70、舵机;71、安装盘;72、第二转动电机;73、肩包式控制器本体;74、背带;75、控制底座;76、多关节手臂;77、仿生控制手;78、显示器支臂;79、显示器;80、主控端手掌;81、三关节控制手指;82、二关节控制手指;83、第一指节;84、第二指节;85、第三指节;86、限位环;87、头部支座;88、机器头;89、头部驱动元件。
具体实施方式
41.下面结合各附图,对本实用新型做详细描述。
42.如图1所示,一种肩背式双臂控制装置,包括:
43.肩包式控制器本体73,具有背带74,肩包式控制器本体73的下端具有向外侧延伸的控制底座75;
44.多关节手臂76,第一端转动安装在控制底座75上;
45.仿生控制手77,转动安装在多关节手臂76的第二端;
46.显示器支臂78,第一端转动安装在控制底座75上;以及
47.显示器79,转动安装在显示器支臂78的第二端,与肩包式控制器本体73信号连接;
48.仿生控制手77包括主控端手掌80、4个三关节控制手指81以及1个二关节控制手指82;主控端手掌80转动安装在多关节手臂76的第二端,三关节控制手指81包括依次转动连接的第一指节83、第二指节84和第三指节85,其中,第一指节83的第一端与主控端手掌80转动连接,第二端与第二指节84的第一端转动连接,第二指节84的第二端与第三指节85转动连接;二关节控制手指82包括依次转动连接的第一指节83和第二指节84,其中,第一指节83的第一端与主控端手掌80转动连接,第二端与第二指节84转动连接;第一指节83、第二指节84和第三指节85均具有供手指穿入的限位环86;各指节的转动处均安装有角度传感器,角度传感器与肩包式控制器本体73信号连接。
49.本技术的肩背式双臂控制装置用于控制仿生机器人,可以背在身上进行操作,通过仿生控制手77的设计,能够将人手指各关节的转动动作转化为控制信号,从而进行精细化操作。
50.于本实施例中,多关节手臂76上安装有位置传感器,位置传感器与肩包式控制器本体73信号连接。肩包式控制器本体73包括电路组件以及供电元件,电路组件具有无线信号通信模块。通过无线信号通信模块能够实现对仿生机器人进行远程控制。
51.如图1所示,于本实施例中,控制底座75、多关节手臂76以及仿生控制手77均具有两组。
52.如图2、3和4所示,本实施例还公开了一种医疗设备,包括医疗机器人50(仿生机器
人)以及本实施例的肩背式双臂控制装置,医疗机器人50包括:
53.机器人本体51;
54.药剂仓52,设置在机器人本体51内;
55.中空的多轴关节53,第一端与机器人本体51连接;
56.仿生手54,安装在多轴关节53的第二端,仿生手54包括手掌部63以及多个手指关节组件,手掌部63具有出药通道64;
57.连接管55,穿设在多轴关节53的中空部分,一端与药剂仓52连接,另一端与出药通道64连通;
58.输送泵56,用于将药剂仓52内的药剂通过连接管55输送至喷药组件;
59.探测机构59,安装在机器人本体51上,探测机构59包括激光雷达60以及摄像头61;
60.仿生手54包括5个手指关节组件,其中四个为三关节组件65,第五个为二关节组件66;三关节组件65包括依次转动连接的第一关节67、第二关节68和第三关节69,其中,第一关节67的第一端通过舵机70与手掌部63连接,第二端通过舵机70与第二关节68的第一端连接,第二关节68的第二端通过舵机70与第三关节69的第一端连接;二关节组件66包括依次转动连接的第一关节67和第二关节68,其中,第一关节67的第一端通过舵机70与手掌部63连接,第二端通过舵机70与第二关节68的第一端连接;
61.机器人本体51具有控制电路,控制电路具有与肩背式双臂控制装置的无线信号通信模块通讯的通讯模块,控制电路根据接收到的控制信号控制医疗机器人50工作。
62.这种结构,使得在进行控制时,能够根据手指关节的角度,精确控制仿生手54像人手动作(通过控制舵机70的转动实现)。
63.于本实施例中,医疗机器人50还包括第一转动电机62,探测机构59转动安装在机器人本体51的上方,第一转动电机62用于驱动探测机构59转动。如图2和6所示,于本实施例中,探测机构59包括转动安装在机器人本体51上方的头部支座87、转动安装在头部支座87上的机器头88以及用于驱动机器头88俯仰变化的头部驱动元件89;激光雷达60和摄像头61安装在机器头88上,头部支座87的转动轴线与机器头88的转动轴线相互垂直。
64.于本实施例中,还包括至少一个与所述药剂仓52连接的药剂罐57以及至少一个与所述药剂仓52连接的注水罐58,所述药剂罐57和注水罐58上安装有输送元件。
65.设置药剂罐57和注水罐58能够根据需要向药剂仓52输送对应的药剂以及调节药剂浓度,这样设计增强了适用性。
66.于本实施例中,所述摄像头61有两个。
67.于本实施例中,医疗机器人50还包括安装盘71以及第二转动电机72,机器人本体51转动安装在安装盘71上,第二转动电机72用于驱动机器人本体51相对安装盘71俯仰转动,安装盘71用于固定在移动平台1上。这样设置,医疗机器人50自身也能进行俯仰操作,调节形式多样,适用性强。
68.如图5所述,于本实施例中,医疗设备还包括移动平台1,医疗机器人50通过安装安装盘71安装在移动平台1上。
69.以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书及附图内容所作的等效结构变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1