一种并联机器人主动臂的制作方法
1.本实用新型涉及并联机器人技术领域,具体涉及一种并联机器人主动臂。
背景技术:
2.并联机器人,简称pm,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且是一种以并联方式驱动的闭环机构。其特点为无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好。
3.并联机器人包括主动臂和从动臂,从动臂的下端设有用于抓去物体的抓手或吸盘,目前抓手或吸盘的极限高度调节通常是通过调节整个并联机器人的高度来实现的,也有通过调节运输物体输送机构的高度来实现的,调节过程需要重新拆卸再组装,相对麻烦。
4.另外,传统并联机器人中主动臂往往是为其提供动力的电机一一对应的,当其中一个损坏更换时也必须按照原有的规格进行替换,尤其是动力臂上轴孔与电机转动端的配合,导致零件的选取上十分受限。
技术实现要素:
5.本实用新型的目的是提供一种并联机器人主动臂,以解决传统并联机器人中抓手或吸盘的极限高度调节麻烦的问题。
6.为实现上述目的,本实用新型采用如下技术方案:
7.一种并联机器人主动臂,包括主体;
8.所述主体包括传动端和动力端;所述传动端铰接设有调节柄,调节柄可在传动端上进行自由开合;
9.所述调节柄上与传动端相互接触的面上沿主体长度方向设有若干第一半圆孔,第一半圆孔贯穿调节柄设置;所述传动端中与调节柄相互接触的面上沿主体长度方向设有若干第二半圆孔,所述调节柄和所述传动端贴合时第一半圆孔和第二半圆孔恰好形成用于与从动臂连接的连接孔;
10.所述调节柄的远铰接端上设有卡接块,所述传动端对应所述卡接块设有卡接口,所述卡接块和所述卡接口螺钉连接;
11.所述动力端设有用于与电机转动端卡接的第一卡接槽和第二卡接槽。
12.进一步地,所述传动端和所述动力端分别朝左、朝右设置;
13.所述动力端设有铰接柄,铰接柄的左端转动设置在主体上,铰接柄的右端可绕其左端进行转动;所述第一卡接槽设置在铰接柄中与动力端相互配合的平面上,第二卡接槽对应设置在动力端上,所述第一卡接槽和所述第二卡接槽均用于卡接电机的转动端。
14.进一步地,所述动力端上设有用于铰接柄啮合的卡槽;所述卡槽上下贯穿所述动力端设置,且卡槽右端于动力端的端部开口。
15.进一步地,所述铰接柄的右端设有固紧螺钉;固紧螺钉前后贯穿铰接柄设置;所述
动力端前后贯穿设有与固紧螺钉配合的弧形槽。
16.进一步地,所述铰接柄的左端设有铰接部,铰接部上设有第一铰接孔;所述主动臂上设有第二铰接孔,所述第一铰接孔和第二铰接孔中套设有转轴。
17.本实用新型的有益效果:
18.一种并联机器人主动臂,包括主体和调节柄,调节柄转动设置在主体的做单,调节柄设有第一半圆孔,主体上对应设有第二半圆孔,每一个第一半圆孔均可与其相对应的第二半圆孔形成用于卡接从动臂的连接孔,当需要进行转盘或是吸盘的高度调节时,可将从动臂的上端设置在不同的连接孔中,从而达到无需调节整个并联机器人或是运输机构的高度既可以实现调节抓手或是吸盘的高度,十分方便。
19.进一步地,在主体的右端设有铰接柄,铰接柄上设有第一卡接槽,主体上对应设有第二卡接槽,当主体与电机传动端配合时,第一卡接槽和第二卡接槽可以进行调节以适用不同大小的电机转动端,增加主体本身的广适性。
附图说明
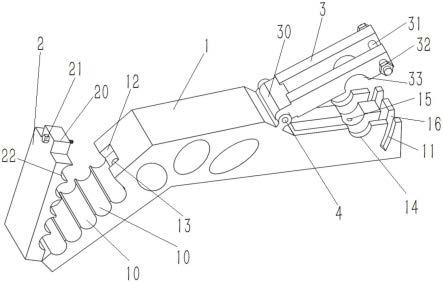
20.图1是该实用新型整体结构示意图。
21.图中各标记对应的名称:
22.1、主体,10、第二半圆孔,11、弧形槽,12、卡接口,13、螺纹孔,14、第二卡接槽,15、加固孔,16、卡槽,2、调节柄,20、卡接块,21、固定螺钉, 22、第一半圆孔,3、铰接柄,30、铰接部,31、固紧螺钉,32、螺母,33、第一卡接槽,4、转轴。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型的实施例:
25.如图1所示,一种并联机器人主动臂,包括主体1。
26.主体1为杆状结构,左端为传动端,用于与从动臂连接,右端为动力端,用于与电机转动端连接。
27.传动端上铰接设有调节柄2,调节柄2的左端铰接设置在传动端的端部,具体地,调节柄2和传动端通过合页实现铰接;调节柄2可通过合页在传动端上自由转动开合;调节柄2和传动端开合角度为零的时候,调节柄2的下侧面与传动端的上侧面相互接触,在调节柄2的下侧面上沿着主体1长度方向前后贯穿设有若干第一半圆孔22,在传动端的上侧面上沿着主体1长度方向前后贯穿设有若干第二半圆孔10,每一个第一半圆孔22均有与之相对应的第二半圆孔 10,当调节柄2和传动端相互贴合时,每一个第一半圆孔22和一个第二半圆孔 10均形成一个用于与从动臂连接的连接孔。
28.在调节柄2的右端设有卡接块20,在传动端上对应卡接块20设有卡接口 12,调节柄2与传动端相互贴合时,卡接块20恰好位于卡接口12中;在卡接块20上旋设有固定螺钉21,卡接口12底部设有螺纹孔13,当卡接块20位于卡接口12中后,固定螺钉21可以旋设进螺
纹孔13中,以将调节柄2固定在传动端上,也即限制调节柄2的转动。
29.并联机器人中,其中一个主动臂和与其对应的从动臂位于一条直线时,抓手或是吸盘的位置最底,想要再调整抓手或是吸盘的上下位置的话,则需要调节并联机器人整体的高度或是输送机构的高度,十分不便,在本技术方案中,通过将传动端设置为多个可调节的连接孔的方式,在需要调节抓手或是吸盘的上下高度时,可将从动臂的上端设置在不同的连接孔中,从而达到无需调节整个并联机器人或是运输机构的高度即可以实现调节抓手或是吸盘的高度。
30.动力端设有铰接柄3,铰接柄3的左端转动设置在主体1上,铰接柄3的右端可绕其左端进行转动;铰接柄3中与动力端相互配合的面上设有第一卡接槽 33,动力端上对应设有第二卡接槽14,第一卡接槽33和第二卡接槽14均用于卡接电机的转动端。
31.动力端上设有用于与铰接柄3啮合的卡槽16;卡槽16上下贯穿所述动力端设置,且卡槽16右端于动力端的端部开口;铰接柄3在绕着其左端转动的同时,其右端可以转动进卡槽16中,从而尽可能地将第一卡接槽33和第二卡接槽14 啮合形成的孔缩小,以最大程度地卡紧电机的转动端。
32.铰接柄3的右端设有固紧螺钉31;固紧螺钉31前后贯穿铰接柄3设置;动力端前后贯穿设有与固紧螺钉31配合的弧形槽11,弧形槽11前后贯穿设置,当铰接柄3转动进卡槽16中时,固紧螺钉31将会对应进入到弧形槽11中,当第一卡接槽33和第二卡接槽14尽可能地将电机的转动端卡紧后,再将固紧螺钉31上的螺母32拧紧,从而固定铰接柄3和动力端的相对转动;在第二卡接槽14的槽底面上设有加固孔15,当固紧螺钉31上的螺母32拧紧之后,将螺丝从动力端的下侧面向上旋入加固孔15中,以顶紧电机转动端防止其转动。
33.铰接柄3的左端设有铰接部30,铰接部30上设有第一铰接孔;动力端对应铰接部30设有第二铰接孔,所述第一铰接孔和第二铰接孔中套设有转轴4。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1