门锁和把手之间的离合机构的制作方法
1.本实用新型涉及智能门锁,尤其是涉及一种门锁和把手之间的离合机构。
背景技术:
2.目前,智能门锁领域通常采用密码或者指纹的方式进行解锁,当输入正确的密码或指纹时,驱动模块就会驱动把手与锁体联动,从而拧动把手开锁。如专利号为cn201820931261.9(授权公告号为cn208456300 u)的中国实用新型公开了《一种电子锁》,该电子锁包括执手、前面板、电子开锁结构、方芯套及方芯,执手转动安装于前面板,电子锁还包括离合器组件,离合器组件与执手及方芯套配合,方芯安装于方芯套,电子开锁结构包括验证装置、控制装置及电机,控制装置与验证装置及电机电连接,验证装置验证用户,当用户通过验证时,控制装置控制电机使离合器组件与方芯套固定,执手转动时带动方芯开锁,当电机未转动时,离合器组件及方芯套分离,执手空转,上述电子锁适用于密码锁、指纹锁、房卡等多种形式。又如专利号为cn 201920182995.6(授权公告号为cn 209761011 u)的中国实用新型专利所公开的《智能门锁把手离合机构》,该离合机构包括把手,把手内设有锁定圆柱、移动锁定组件和电机,移动锁定组件一端与电机输出端连接,移动锁定组件另一端靠近锁定圆柱,锁定圆柱转动设置;电机能够带动移动锁定组件插入或离开锁定圆柱;锁定圆柱的柱体上端设有凸块;把手内固定设置挡块,挡块位于凸块靠近移动锁定组件的一侧。该智能门锁把手离合机构将电机和离合组件安装在把手内部,由于把手内部安装空间狭窄,因此对安装精度要求较高,容易出现电机和离合组件安装不到位的现象,进而影响机构的安全性和可靠性。
技术实现要素:
3.本实用新型所要解决的技术问题是针对上述现有技术现状,提供一种安全性高、性能稳定可靠的门锁和把手之间的离合机构。
4.本实用新型解决上述技术问题所采用的技术方案为:该门锁和把手之间的离合机构,包括锁壳、设于锁壳前侧的把手组件和设于锁壳后侧的锁芯转轴组件,所述锁芯转轴组件的前端用来与把手组件相配合,锁芯转轴组件的后端用来连接在锁芯上,其特征在于:在所述锁壳内安装有离合组件,所述离合组件包括离合块、离合片和驱动件,所述驱动件能驱动离合片往复运动,所述离合块能随之同步往复运动而使离合机构在离合脱离状态和离合闭锁状态之间切换,在离合闭锁状态下,所述把手组件能带动锁芯转轴组件同步转动,在离合脱离状态下,所述把手组件无法带动锁芯转轴组件同步转动。
5.优选地,所述离合片设于离合块的下方且与离合块的底部相抵,所述驱动件能驱动离合片上下往复运动,相应地,所述离合块随之上下往复运动。此外,离合片与离合块之间还可以有其他位置关系。
6.为了使把手组件与锁芯转轴组件通过离合块相互配合,所述把手组件包括把手和随把手同步转动的把手芯轴,所述锁芯转轴组件包括连接头和转轴,所述连接头固定在转
轴的前端并安装在把手芯轴上,所述离合块设于把手芯轴与连接头之间,所述转轴的后端插入所述锁芯的锁芯槽内。
7.为了使转轴能带动锁芯解锁,优选地,所述的转轴为方轴,对应地,所述锁芯槽为方槽。
8.进一步优选,所述把手芯轴的后端具有开口朝下的安装槽,所述离合块设于所述安装槽内而能相对安装槽上下移动,在所述安装槽内安装有压簧,所述压簧的上端与把手芯轴相抵,压簧的下端与离合块相抵,所述离合块在压簧的作用下向下移动而处于离合闭锁状态。这样,压簧始终压紧离合块,可以使闭锁更为可靠。
9.为了使压簧能更为稳定地作用于离合块,所述离合块的上部开有限位槽,所述压簧的下端限位在所述限位槽内。
10.为了使离合块能更好地与连接头相配合,所述离合块的下部形成离合部,所述连接头的前侧部的周向开有缺口部,离合闭锁状态下,所述离合部向下移动至伸入所述缺口部,离合脱离状态下,离合部向上移动至脱离所述缺口部。
11.进一步优选,在所述锁壳内安装有前安装板和后安装板,所述锁壳上开有安装孔,所述前安装板上开有第一通孔,所述后安装板上开有与安装孔、第一通孔相对应的第二通孔,所述把手芯轴的后端穿过安装孔并伸入至所述第一通孔内,所述前安装板上开有离合片安装槽,所述离合片安装槽位于第一通孔的下方,在所述第一通孔的下沿开有供所述离合片上下移动的通道,所述离合块设于所述通道的上方。
12.为了对锁芯转轴组件的转动角度进行限制,所述前安装板的第一通孔的后侧周向设有第一限位台阶和第二限位台阶,所述连接头的前侧周向设有限位凸块,所述连接头穿过所述后安装板的第二通孔,在离合闭锁状态下,所述的限位凸块被限位在第一限位台阶与第二限位台阶之间作周向运动。
13.驱动件可以有多种结构,优选地,所述驱动件为电机,在所述锁壳内安装有扭簧,所述扭簧的一端连接在所述电机的驱动输出端上,扭簧的另一端连接在所述离合片上。
14.与现有技术相比,本实用新型的优点在于:该门锁和把手之间的离合机构在驱动件的带动下通过离合块的往复运动实现状态切换,在离合闭锁状态下,把手组件带动锁芯转轴组件同步转动,进而带动锁芯解锁,在离合脱离状态下,把手组件无法带动锁芯转轴组件同步转动,并且,通过将离合组件安装在锁壳内部,由于锁壳内具有足够的安装空间,因而可以使得机构结构更为稳定,进而提升门锁的安全性和可靠性。
附图说明
15.图1为本实用新型实施例的结构示意图;
16.图2为本实用新型实施例的另一角度的结构示意图(离合闭锁状态);
17.图3为本实用新型实施例的另一角度的结构示意图(离合脱离状态);
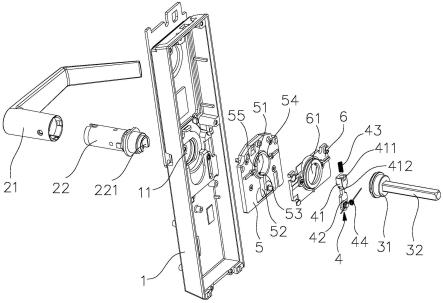
18.图4为本实用新型实施例的分解示意图;
19.图5为本实用新型实施例的另一分解示意图;
20.图6为本实用新型实施例的结构剖视图。
具体实施方式
21.以下结合附图实施例对本实用新型作进一步详细描述。
22.如图1至图6所示,本实施例的门锁和把手之间的离合机构包括锁壳1、把手组件2、锁芯转轴组件3、离合组件4、前安装板5和后安装板6等组件。其中,把手组件2设于锁壳1的前侧,锁芯转轴组件3设于锁壳1的后侧,锁芯转轴组件3的前端用来与把手组件2相配合,锁芯转轴组件3的后端用来连接在锁芯(图中未示)上。
23.本实施例的把手组件2包括把手21和安装在把手21内部的把手芯轴22,把手芯轴22能随把手21同步转动。锁芯转轴组件3包括连接头31和转轴32,连接头31固定在转轴32的前端并安装在把手芯轴22上,连接头31的前侧部的周向开有缺口部311,转轴32的后端插入锁芯的锁芯槽内。本实施例中,转轴32为方轴,锁芯槽为方槽,转轴32插入锁芯槽后,锁芯便能与转轴32同步转动。
24.本实施例的离合组件4安装在锁壳1内部,包括离合块41、离合片42、压簧43、扭簧44和电机45。其中,电机45构成驱动件,电机45通过扭簧44带动离合片42上下往复运动,离合块41能随之同步上下往复运动而使离合机构在离合脱离状态和离合闭锁状态之间切换。在离合闭锁状态下,把手组件2能带动锁芯转轴组件3同步转动,在离合脱离状态下,把手组件2无法带动锁芯转轴组件3同步转动。
25.本实施例的离合组件4的具体安装结构如下:
26.把手芯轴22的后端具有开口朝下的安装槽221,离合块41设于安装槽221内而能相对安装槽221向下移动,离合块41的上部开有限位槽411,离合块41的下部形成与缺口部311相配合的离合部412。压簧43设于安装槽221内,压簧43的上端与把手芯轴22相抵,压簧43的下端限位在限位槽411内即与离合块41相抵。
27.离合片42设于离合块41的下方,离合片42始终与离合块41的底部相抵。扭簧44安装在锁壳1,扭簧44的一端连接在电机45的驱动输出端上,扭簧44的另一端连接在离合片42上。
28.在离合闭锁过程中,离合片42在电机45的驱动下,通过扭簧44的带动而向下运动,同时,离合块41在压簧43的作用下向下移动,直至离合块41的离合部412伸入至连接头31的缺口部311内,达到离合闭锁状态,此时,转动把手21,把手芯轴22与把手21同步转动,把手芯轴22带动离合块41同步转动,离合块41带动连接头31和转轴32同步转动,进而解锁锁芯。
29.在离合脱离过程中,离合片42在电机45的驱动下,通过扭簧44的带动而向上运动,离合片42带动离合块41向上移动,离合块41的下部完全脱离连接头31的缺口部311,压簧43被进一步压缩,达到离合脱离状态,此时,把手21转动时无法带动连接头31和转轴32转动,因此无法带动锁芯进行解锁。
30.如图5和图6所示,前安装板5和后安装板6安装在锁壳1内,锁壳1上开有安装孔11,前安装板5上开有第一通孔51,后安装板6上开有第二通孔61,安装孔11、第一通孔51和第二通孔61前后对齐,把手芯轴22的后端穿过安装孔11并伸入至第一通孔51内。前安装板5上开有离合片安装槽52,离合片安装槽52位于第一通孔51的下方,扭簧44安装在前安装板5上,在第一通孔51的下沿开有供离合片42上下移动的通道53,离合块41设于通道53的上方,离合片42穿过通道53并与离合块41的底部相抵。
31.另外,前安装板5的第一通孔51的后侧周向设有第一限位台阶54和第二限位台阶
55,连接头31的前侧周向设有限位凸块312,连接头31穿过后安装板6的第二通孔61。在离合闭锁状态下,限位凸块312被限位在第一限位台阶54与第二限位台阶55之间作周向运动,由此可以限制把手21的转动范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1