一种用于工业机器人的通用型夹具的制作方法
1.本技术涉及机器人夹具的技术领域,尤其是涉及一种用于工业机器人的通用型夹具。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,夹具为工业机器人的重要组成部分,起到对工件进行夹取的作用。
3.在相关技术中,如公告号为cn206140539u的中国实用新型专利公开了一种用于工业机器人的通用型夹具,其包括具有前端、后端的基架,前端上设有基架安装孔,后端上设有若干个吸盘架,吸盘架的始端与基架用转轴组件连接,吸盘架的末端上设有吸盘组件,吸盘架与转轴组件之间设有导向组件,导向组件与设在基架上的导向槽连接,导向组件设在吸盘架上,导向组件可在导向槽滑动。夹具在对工件进行夹取时,吸盘架可绕转轴组件转动,如此设置各个吸盘的位置可以根据工件的不同对不同的工件进行夹取。
4.针对上述中的相关技术,发明人认为工件上可能会粘附有灰尘,继而使得夹具在对工件进行夹取时,工件上的灰尘会在吸盘吸力的作用下进入吸盘中,长时间使用后将会导致吸盘堵塞,从而使得夹具对工件的夹取效果变差,进而存在有夹具长时间使用后夹持效果会变差的缺陷。
技术实现要素:
5.为了减少夹具长时间使用后夹持效果会变差的问题,本技术提供一种用于工业机器人的通用型夹具。
6.本技术提供的一种用于工业机器人的通用型夹具采用如下的技术方案:
7.一种用于工业机器人的通用型夹具,包括基架和设置在所述基架上的吸盘组件,所述吸盘组件包括均设置在所述基架上的多个吸盘杆和设置在每个所述吸盘杆上的吸盘,还包括设置在所述吸盘组件上用于对工件进行清理的清理组件。
8.通过采用上述技术方案,在使用夹具对工件进行夹取时,先使用吸盘上的清理组件对工件上的灰尘进行清扫,然后再将吸盘吸附在工件的表面,继而使得夹具对工件进行夹取,此过程中减少了灰尘进入吸盘中的情况发生,进而减少夹具长时间使用后夹持效果变差的情况发生。
9.可选的,所述基架的一端转动连接有连接盘,每个所述吸盘杆均固定连接在所述连接盘上。
10.通过采用上述技术方案,在对端面形状不规则的工件进行夹取时,此时可以转动连接盘,继而使得连接盘带动吸盘杆转动,即吸盘与工件之间的相对位置发生改变,从而尽可能的使得每个吸盘都能吸附在工件上,一方面增加夹具对工件进行夹取时的稳定性,另一方面增加夹具的灵活性。
11.可选的,所述清理组件包括设置在每个吸盘杆上的清理盘,所述清理盘用于对工
件进行清理。
12.通过采用上述技术方案,使用夹具对工件进行夹取前,先使用清理盘对工件端面的灰尘进行清理,即减少工件端面的灰尘进入吸盘中的情况发生,即尽可能的保证夹具对工件的夹取效果。
13.可选的,每个所述吸盘杆远离所述连接盘的一端均转动连接有转动块,所述吸盘和所述清理盘分别设置在所述转动块的两个侧面上。
14.通过采用上述技术方案,使用夹具对工件进行夹取前,先对转动块进行转动,继而使得清理盘朝向工件,再使用清理盘对工件端面的灰尘进行清理,再反向对转动块进行转动,从而使得吸盘朝向工件,再将吸盘与工件吸附在一起,即完成对工件的清理和对工件的夹取。
15.可选的,所述连接盘上固定连接有t型块,所述基架上开设有容纳所述t型块的容纳腔,所述t型块转动连接在所述容纳腔中。
16.通过采用上述技术方案,连接盘转动时,连接盘带动t型块转动,t型块与容纳腔发生相对转动,通过设置t型块和容纳腔,可以增加连接盘与基架的连接稳定性并增加连接盘转动时的稳定性。
17.可选的,所述基架背离所述连接盘的端面上固定连接有第一驱动电机,所述第一驱动电机的输出轴插入所述基架中并与所述t型块固定连接。
18.通过采用上述技术方案,将清理盘转动至朝向工件的端面后,使得清理盘与工件的端面抵触,启动第一驱动电机,第一驱动电机带动t型块转动,t型块带动连接盘转动,连接盘带动吸盘杆转动,吸盘杆带动清理盘转动,清理盘与工件的端面发生相互摩擦,工件表面的灰尘被清理,此过程中无需工作人员对清理盘进行人为的驱动,即达到减少工作人员工作量的效果。
19.可选的,所述转动块上固定连接有转轴,所述吸盘杆远离所述连接盘的一端开设有容纳所述转轴的连接孔,所述转轴转动连接在所述连接孔中。
20.通过采用上述技术方案,在对转动块进行转动时,转动块带动转轴转动,转轴在连接孔中转动,即增加转动块转动时的稳定性和增加转动块与吸盘杆的连接稳定性。
21.可选的,所述连接孔的孔壁上开设有环槽,所述转轴上固定连接有限位环,所述限位环转动连接在所述环槽中。
22.通过采用上述技术方案,转动块转动时,转动块带动转轴转动,转轴带动限位环转动,限位环在环槽中转动,通过设置环槽和限位环,可以减少转轴与转动孔分离的情况发生,即增加转动块与吸盘杆的连接稳定性,进而增加夹具对工件进行夹取时的稳定性。
23.可选的,所述连接孔中固定连接有第二驱动电机,所述第二驱动电机的输出轴与所述转轴传动连接。
24.通过采用上述技术方案,对转动块进行转动时,启动第二驱动电机,第二驱动电机对转轴进行传动,继而使得转轴转动,转轴带动转动块转动,即实现转动块的自动转动。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.通过设置基架、吸盘杆、吸盘和清理组件,使用夹具对工件进行夹取时,先使用清理组件对工件的端面进行清理,然后再将吸盘与工件连接在一起,此过程中减少了灰尘进入吸盘中对吸盘堵塞的情况发生,进而尽可能的保证夹具对工件的夹持效果;
27.2.通过设置连接盘,连接盘与基架转动连接,在对端面不规则的工件进行夹取时,工作人员可以通过对连接盘进行调节,继而调节吸盘与工件的相对位置,即尽可能的使得每个吸盘均可与工件的端面吸附在一起,即增加夹具对工件的夹取效果;
28.3.通过设置清理盘,对工件进行夹取前,先使用清理盘对工件端面上的灰尘进行清理,然后再将吸盘与工件吸附在一起,即减少工件上存在灰尘影响吸盘对工件的吸附效果。
附图说明
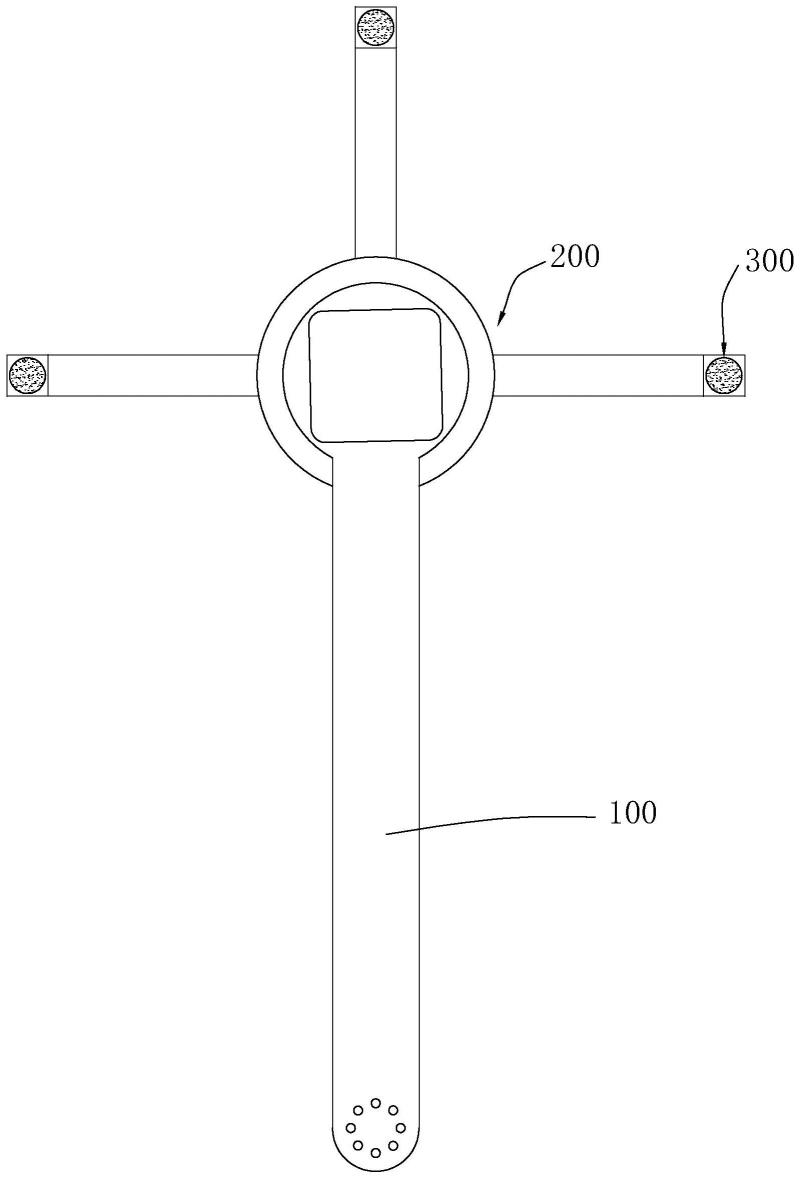
29.图1是本技术实施例夹具的整体结构示意图;
30.图2是本技术实施例夹具的另一视角结构示意图,主要示出t型块;
31.图3是本技术实施例夹具的部分结构示意图,主要示出第二驱动电机。
32.附图标记说明:100、基架;110、容纳腔;120、第一驱动电机;200、吸盘组件;210、连接盘;211、t型块;220、吸盘杆;221、转动块;222、转轴;223、限位环;224、连接孔;225、环槽;226、第二驱动电机;230、吸盘;300、清理组件;310、清理盘。
具体实施方式
33.以下结合附图1-3对本技术作进一步详细说明。
34.本技术实施例公开一种用于工业机器人的通用型夹具。
35.参照图1,一种用于工业机器人的通用型夹具包括基架100、吸盘组件200和清理组件300,吸盘组件200设置在基架100上,清理组件300设置在吸盘组件200。使用夹具对工件进行夹取时,清理组件300先对工件进行清理,即减少工件上存在灰尘的情况发生,然后吸盘组件200对工件进行吸附,此过程中减少了工件上的灰尘进入吸盘组件200中对吸盘组件200进行堵塞,影响夹具对工件夹取效果的情况发生。
36.参照图1和图2,吸盘组件200包括连接盘210、多个吸盘杆220和多个吸盘230,其中吸盘230与吸盘杆220一一对应设置,每个吸盘230均设置在吸盘杆220的一端,多个吸盘杆220沿连接盘210的周向均匀间隔设置,每个吸盘杆220远离吸盘230的一端均与连接盘210固定连接。
37.连接盘210的端面上设置有t型块211,t型块211由两个直径大小不同的圆柱体组成,两个圆柱体同轴固定连接,其中直径较小的圆柱体与连接盘210固定连接。基架100上开设有容纳t型块211的容纳腔110,t型块211位于容纳腔110中。在对吸盘230与工件的相对位置进行调整时,转动连接盘210,连接盘210带动t型块211转动,t型块211在容纳腔110中转动,连接盘210带动吸盘杆220转动,吸盘杆220带动吸盘230转动,即实现对吸盘230与工件相对位置的调节。
38.基架100背离连接盘210的端面上固定连接有第一驱动电机120,第一驱动电机120的输出轴穿入基架100中并与直径较大的圆柱体固定连接。对连接盘210进行转动时,启动第一驱动电机120,第一驱动电机120带动连接盘210转动,即实现连接盘210的自动转动,此过程中无需工作人员对连接盘210进行人为的转动,即达到减少工作人员工作量的效果。
39.参照图1和图3,每个吸盘杆220的一端均设置有转动块221,转动块221上固定连接有转轴222,每个吸盘杆220上均开设有容纳转轴222的连接孔224,每个转轴222均插入对应
的连接孔224中。每个连接孔224的孔壁上均开设有环槽225,每个转轴222上均同轴固定连接有限位环223,限位环223位于环槽225中。清理组件300包括多个清理盘310,清理盘310和吸盘230一一对应设置,并且清理盘310和吸盘230分别固定连接在转动块221相对的两个端面上。
40.对工件上的灰尘进行清理时,先对转动块221进行转动,转动块221带动转轴222运动,转轴222与连接孔224发生相对转动,转轴222带动限位环223转动,限位环223与环槽225发生相对转动,继而使得清理盘310朝向工件的端面,然后再使得清理盘310与工件的端面抵触,启动第一驱动电机120,第一驱动电机120对连接盘210进行驱动,清理盘310与工件的端面发生相对摩擦,即完成对工件上的灰尘进行清理。再对转动块221进行反向转动,使得吸盘230朝向工件,最后再将吸盘230与工件吸附在一起。
41.参照图1和图3,连接孔224中固定连接有第二驱动电机226,第二驱动电机226为步进式的,第二驱动电机226的输出轴与转轴222同轴固定连接。驱动转动块221转动时,启动第二驱动电机226,第二驱动电机226带动转轴222转动,从而使得转轴222带动转动块221转动,此过程中无需工作人员对转动块221进行人为的转动,即达到减少工作人员工作量的效果。
42.本技术实施例一种用于工业机器人的通用型夹具的实施原理为:使用夹具对工件进行夹取时,先启动第二驱动电机226,第二驱动电机226对转动块221进行驱动,继而使得清理盘310朝向工件。然后使得清理盘310与工件的端面抵触,启动第一驱动电机120,第一驱动电机120带动连接盘210转动,连接盘210带动清理盘310转动,清理盘310对工件上的灰尘进行清理。再将清理盘310与工件分离,启动第二驱动电机226,第二驱动电机226对转动块221进行反向驱动,吸盘230朝向工件,最后再将吸盘230与工件吸附在一起,即完成对工件的夹取,此过程中减少了灰尘进入吸盘230中对吸盘230堵塞的情况发生,进而减少了吸盘230堵塞影响夹具对工件夹取效果的情况发生。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1