导轨组件和工业用机器人的制作方法
1.本实用新型涉及导轨组件和工业用机器人。
背景技术:
2.用于搬运玻璃基板等搬运对象的工业用机器人有时具有导轨组件以及机器人主体,导轨组件具有线性支承框架(有时也称作线性引导件)和支承于线性支承框架的导轨,机器人主体以能沿导轨移动的方式经由导轨支承于线性支承框架。
3.在上述工业用机器人中,有时机器人主体移动的行程较长,在这种情况下,需要将多个线性支承框架以端部彼此对接而形成对接面的方式拼接来支承导轨。
4.在将多个线性支承框架拼接时,相互对接的线性支承框架的支承导轨的支承面不易齐平,容易产生错位。为了缓和相互对接的线性支承框架的支承面彼此间的错位,如图6所示,可考虑将导轨12x设置成跨过相互对接的线性支承框架11x的端部的对接面asx。然而,在这种情况下,如图6所示,导轨12x容易因在相互对接的线性支承框架11x的端部的对接面asx处急剧弯曲或扭曲而导致导轨12x的安装精度变差,影响导轨12x的寿命。
技术实现要素:
5.本实用新型正是鉴于上述问题而完成的,目的在于提供一种导轨组件和具有该导轨组件的工业用机器人,即使相互对接的两个支承框架各自的支承导轨的面不齐平,也能抑制导轨因在两个支承框架的端部的对接面处急剧弯曲或扭曲而导致导轨的安装精度变差,影响导轨的寿命。
6.为了实现上述目的,本实用新型提供一种导轨组件,包括:第一支承框架和第二支承框架,该第一支承框架的端部和第二支承框架的端部沿第一方向彼此对接而形成对接面;以及导轨,该导轨以在所述第一方向上跨过所述对接面的方式从与所述第一方向垂直的第二方向支承于所述第一支承框架和所述第二支承框架,其中,所述第一支承框架、所述第二支承框架和所述导轨设置成:在所述对接面处,所述第一支承框架的所述端部和所述第二支承框架的所述端部在与所述第一方向和所述第二方向垂直的第三方向整体上分别与所述导轨在所述第二方向上分离。
7.根据本实用新型的导轨组件,第一支承框架、第二支承框架和导轨设置成:在对接面处,第一支承框架的端部和第二支承框架的端部在与第一方向和第二方向垂直的第三方向整体上分别与导轨在第二方向上分离,因此,即使第一支承框架和第二支承框架各自的在第二方向上支承导轨的面不齐平,也能抑制因导轨在第一支承框架的端部和第二支承框架的端部的对接面处急剧变化(弯曲或扭曲)而导致导轨的安装精度变差,影响导轨组件的寿命。
8.此外,在本实用新型的导轨组件中,优选在所述第一支承框架的所述端部,设置有使所述第一支承框架的所述端部在所述对接面处与所述导轨在所述第二方向上分离的避让部,在所述第二支承框架的所述端部,设置有使所述第二支承框架的所述端部在所述对
接面处与所述导轨在所述第二方向上分离的避让部。
9.根据本实用新型的导轨组件,在第一支承框架的端部,设置有使第一支承框架的端部在对接面处与导轨在第二方向上分离的避让部,在第二支承框架的端部,设置有使第二支承框架的端部在对接面处与导轨在第二方向上分离的避让部,因此,与在导轨上与对接面对应地设置避让部的情况不同,在将导轨支承于第一支承框架和第二支承框架时无需在第一方向上使避让部与对接面对准,有助于简化安装工序。
10.此外,在本实用新型的导轨组件中,优选所述第一支承框架的所述端部在所述第三方向上位于所述避让部的两侧的部分,分别与所述第二支承框架的所述端部在所述第三方向上位于所述避让部的两侧的部分在所述第一方向上对接。
11.此外,在本实用新型的导轨组件中,优选在所述第一支承框架的所述端部中,所述避让部是相对于该端部在所述第三方向上位于该避让部的两侧的部分沿所述第二方向凹陷的凹部或沿所述第二方向贯穿的贯穿孔,在所述第二支承框架的所述端部中,所述避让部是相对于该端部在所述第三方向上位于该避让部的两侧的部分沿所述第二方向凹陷的凹部或沿所述第二方向贯穿的贯穿孔。
12.根据本实用新型的导轨组件,在第一支承框架的端部中,避让部是相对于该端部在第三方向上位于该避让部的两侧的部分沿第二方向凹陷的凹部或沿第二方向贯穿的贯穿孔,在第二支承框架的端部中,避让部是相对于该端部在第三方向上位于该避让部的两侧的部分沿第二方向凹陷的凹部或沿第二方向贯穿的贯穿孔,因此,能以低成本形成避让部,并且,能利用第一支承框架的端部和第二支承框架的端部在第三方向上位于避让部两侧的部分方便地检查第一支承框架和第二支承框架是否对齐。
13.此外,在本实用新型的导轨组件中,优选所述第一支承框架和所述第二支承框架中的至少一方具有:从所述第二方向支承所述导轨的第一部分;以及从所述第一部分沿所述第二方向立起且从所述第三方向抵接所述导轨的第二部分。
14.根据本实用新型的导轨组件,第一支承框架和第二支承框架中的至少一方具有:从第二方向支承导轨的第一部分;以及从第一部分沿第二方向立起且从第一方向第三方向抵接导轨的第二部分,因此,导轨容易在第三方向上相对于第一支承框架、第二支承框架定位。
15.此外,在本实用新型的导轨组件中,优选在所述导轨的面向所述第一部分与所述第二部分的相交部位的角部设有倒角,该倒角使所述导轨的所述角部与所述第一支承框架及所述第二支承框架分离。
16.根据本实用新型的导轨组件,在导轨的面向第一部分与第二部分的相交部位的角部设有倒角,该倒角使导轨的角部与第一支承框架及第二支承框架分离,因此,即使降低第一部分与第二部分的相交部位的制造精度,导轨也容易同时与第一部分和第二部分抵接。
17.此外,在本实用新型的导轨组件中,优选所述避让部是沿所述第二方向凹陷的凹部或沿所述第二方向贯穿的贯穿孔。
18.根据本实用新型的导轨组件,避让部是沿第二方向凹陷的凹部或沿第二方向贯穿的贯穿孔,因此,能以低成本形成避让部。
19.此外,在本实用新型的导轨组件中,优选还具有基座,该基座在所述第二方向上从与所述导轨相反的一侧支承所述第一支承框架和所述第二支承框架。
20.此外,为了实现上述目的,本实用新型提供一种工业用机器人,其具有:上述任一项的导轨组件;以及机器人主体,该机器人主体以能沿所述第一方向移动的方式支承于所述导轨组件的所述导轨。
21.(实用新型效果)
22.根据本实用新型,第一支承框架、第二支承框架和导轨设置成:在对接面处,第一支承框架的端部和第二支承框架的端部在与第一方向和第二方向垂直的第三方向整体上分别与导轨在第二方向上分离,因此,即使第一支承框架和第二支承框架各自的在第二方向上支承导轨的面不齐平,也能抑制因导轨在第一支承框架的端部和第二支承框架的端部的对接面处急剧变化(弯曲或扭曲)而导致导轨的安装精度变差,影响导轨组件的寿命。
附图说明
23.图1是示意表示本实用新型实施方式的导轨组件以及包括该导轨组件的工业用机器人的主视图。
24.图2是示意表示本实用新型实施方式的导轨组件的局部剖视图。
25.图3是示意表示本实用新型实施方式的导轨组件的局部立体图。
26.图4是图3中的方框部分的放大图。
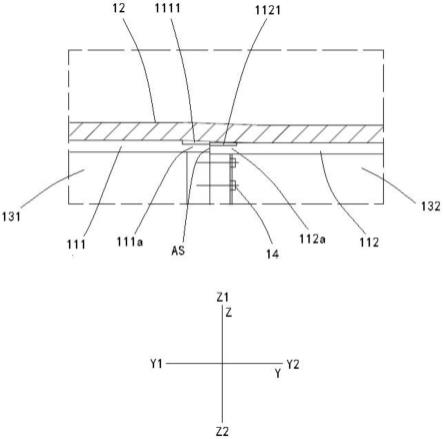
27.图5是示意表示本实用新型实施方式的导轨组件的局部侧剖视图。
28.图6是示意表示现有的导轨组件的局部侧剖视图。
29.(符号说明)
[0030]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
工业用机器人
[0031]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导轨组件
[0032]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一支承框架
[0033]
111a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一部分
[0034]
111b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二部分
[0035]
112a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一部分
[0036]
112b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二部分
[0037]
111a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一支承框架的端部
[0038]
1111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
避让部
[0039]
112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二支承框架
[0040]
112a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二支承框架的端部
[0041]
1121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
避让部
[0042]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导轨
[0043]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基座
[0044]
131
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一基座
[0045]
132
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二基座
[0046]
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接件
[0047]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机器人主体
[0048]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手
[0049]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
臂
[0050]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
立柱部
[0051]
24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
座部
[0052]
as
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对接面
具体实施方式
[0053]
下面,结合图1至图5对本实用新型实施方式的导轨组件以及包括该导轨组件的工业用机器人进行说明,其中,图1是示意表示本实用新型实施方式的导轨组件以及包括该导轨组件的工业用机器人的主视图,图2是示意表示本实用新型实施方式的导轨组件的局部剖视图,图3是示意表示本实用新型实施方式的导轨组件的局部立体图,图4是图3中的方框部分的放大图,图5是示意表示本实用新型实施方式的导轨组件的局部侧剖视图。
[0054]
此处,为方便说明,将相互正交的三个方向设为x方向、y方向和z方向,且将x方向的一侧设为x1,将x方向的另一侧设为x2,将y方向的一侧设为y1,将y方向的另一侧设为y2,将z方向的一侧设为z1,将z方向的另一侧设为z2,并且,z方向例如与实际使用时的上下方向一致,z1方向例如对应于实际使用时的上方。
[0055]
(工业用机器人的整体结构)
[0056]
如图1和图2所示,工业用机器人1具有:导轨组件10,该导轨组件10具有导轨12;以及机器人主体20,该机器人主体20以能沿y方向(相当于本实用新型中的第一方向)移动的方式支承于导轨组件10的导轨12。
[0057]
(导轨组件的结构)
[0058]
如图1至图3所示,导轨组件10设有一对,这一对导轨组件10的结构大致关于yz平面对称,因此,在此以图2中左侧的导轨组件10为主进行说明。
[0059]
如图2至图5所述,导轨组件10包括:第一支承框架111和第二支承框架112,该第一支承框架111的端部111a和第二支承框架112的端部112a沿y方向彼此对接而形成对接面as;以及导轨12,该导轨12以在y方向上跨过对接面as的方式从z方向(相当于本实用新型中的第二方向)支承于第一支承框架111和第二支承框架112,并且,第一支承框架111、第二支承框架112和导轨12设置成:在对接面as处,第一支承框架111的端部111a和第二支承框架112的端部112a在x方向(相当于本实用新型中的第三方向)整体上分别与导轨在z方向上分离。
[0060]
此处,如图3至图5所示,第一支承框架111、第二支承框架112和导轨12分别呈沿y方向延伸的长条状。
[0061]
此外,如图3至图5所示,在第一支承框架111的端部111a和第二支承框架112的端部112a分别设置有避让部1111、1121,避让部1111、1121使第第一支承框架111的端部111a和第二支承框架112的端部112a在对接面as处分别与导轨12在z方向上分离。
[0062]
此外,如图3和图4所示,第一支承框架111的端部111a在x方向上位于避让部1111两侧的部分,分别与第二支承框架112的端部112a在x方向上位于避让部1121两侧的部分在y方向上对接。具体而言,在第一支承框架111的端部111a中,避让部1111是相对于该端部111a在x方向上位于该避让部1111两侧的部分沿z方向观察的凹陷部(在图示的例子中,沿z方向观察呈矩形,且凹陷部的底面与z方向垂直,但并不局限于此),在第二支承框架112的端部112a中,避让部1121是相对于该端部112a在x方向上位于该避让部1121两侧的部分沿z
方向贯穿的凹陷部(在图示的例子中,沿z方向观察呈矩形,且凹陷部的底面与z方向垂直,但并不局限于此)。
[0063]
此外,在一对导轨组件10中,图3中左侧的导轨组件10的第一支承框架111和第二支承框架112分别具有:从z方向支承导轨12的第一部分111a、112a;以及从第一部分111a、112a沿z方向立起且从x方向抵接导轨12的第二部分111b、112b。并且,在导轨12的面向第一部分111a、112a与第二部分111b、112b的相交部位的角部设有倒角,该倒角使导轨12的角部与第一支承框架111及第二支承框架112分离。
[0064]
此外,在一对导轨组件10中,图3中右侧的导轨组件10的第一支承框架111和第二支承框架112仅具有从z方向支承导轨12的第一部分,而不具有从第一部分沿z方向立起且从x方向抵接导轨12的第二部分。
[0065]
此外,如图2至图5所示,导轨组件10还具有基座13,该基座13在z方向上从与导轨12相反的一侧(在图示的例子中是z2方向侧)支承第一支承框架111和第二支承框架112。具体而言,基座13包括第一基座131和第二基座132,第一基座131和第二基座132在y方向上对接,第一基座131和第二基座132的对接面与第一支承框架111和第二支承框架112的对接面as一致。第一基座131从z2方向支承第一支承框架111,第二基座132从z2方向支承第二支承框架112。并且,第一基座131和第二基座132彼此通过螺钉等连接件14固定在一起。
[0066]
(机器人主体的结构)
[0067]
如图1所示,机器人主体20具有装载搬运对象(例如玻璃基板)的两个手21;两条臂22,两个手21分别连接于两条臂22的前端侧;以及支承两条臂22的立柱部23,立柱部23的z2方向侧的端部经由座部24以能沿y方向移动的方式支承于导轨组件10的导轨12,且使两条臂22能在z方向上升降。
[0068]
(本实施方式的主要效果)
[0069]
根据本实施方式的工业用机器人1,包括导轨组件10,在该导轨组件10中,第一支承框架111、第二支承框架112和导轨12设置成:在对接面as处,第一支承框架111的端部111a和第二支承框架112的端部112a在与x方向整体上分别与导轨12在z方向上分离,因此,即使第一支承框架111和第二支承框架112各自的在z方向上支承导轨12的面不齐平,也能抑制因导轨12在第一支承框架111的端部111a和第二支承框架112的端部112a的对接面as处急剧变化(弯曲或扭曲)而导致导轨12的安装精度变差,影响导轨组件10的寿命。
[0070]
上面结合附图对本实用新型进行了示例性描述,显然本实用新型的具体实现并不受上述实施方式的限制。
[0071]
例如,在上述实施方式中,导轨组件10应用于工业用机器人1,但并不局限于此,导轨组件10也可应用于其它装置。
[0072]
此外,在上述实施方式中,在第一支承框架111的端部111a中,避让部1111是相对于该端部111a在x方向上位于该避让部1111两侧的部分沿z方向贯穿的凹陷部,在第二支承框架112的端部112a中,避让部1121是相对于该端部112a在x方向上位于该避让部1121两侧的部分沿z方向z方向贯穿的凹陷部,但并不局限于此,避让部1111、避让部1121也可以是沿z方向贯穿的贯穿孔。
[0073]
此外,在上述实施方式中,在第一支承框架111的端部111a和第二支承框架112的端部112a分别设置有避让部1111、1121,但并不局限于此,也可在导轨12的与对接面as在z
方向上重叠的部分设置避让部。
[0074]
此外,在上述实施方式中,第一支承框架111的端部111a在x方向上位于避让部1111两侧的部分,分别与第二支承框架112的端部112a在x方向上位于避让部1121两侧的部分在y方向上对接,但并不局限于此,也可以是仅有第一支承框架111的端部111a在x方向上位于避让部1111一侧的部分与第二支承框架112的端部112a在x方向上位于避让部1121一侧的部分在y方向上对接。
[0075]
此外,在上述实施方式中,在一对导轨组件10中,图3中左侧的导轨组件10的第一支承框架111和第二支承框架112分别具有:从z方向支承导轨12的第一部分111a、112a;以及从第一部分111a、112a沿z方向立起且从x方向抵接导轨12的第二部分111b、112b,但并不局限于此,根据情况,也可省略第二部分111b、112b,在这种情况下,也可省略导轨12角部的倒角。
[0076]
应当理解,本实用新型在其范围内,能将实施方式中的各个部分自由组合,或是将实施方式中的各个部分适当变形、省略。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1