一种地下通道检测机器人的制作方法
1.本实用新型涉及存放装置技术领域,尤其涉及一种地下通道检测机器人。
背景技术:
2.随着地下综合管廊陆续投入运营,对安全巡检的要求也越来越高,因地下综合管廊内空间狭长,内部环境未知因素多,尤其对地下深度大的管廊来说,采用机器人巡检成为相对可靠、安全的手段,同时,也提高了巡检效率。
3.检测机器人上一般设置有用于记录地下通道内情况的摄像装置,由于地下环境比较潮湿,所以摄像装置的镜头上容易附着一层水雾,影响拍摄画面的清晰度,使工作人员无法清楚的看清摄像装置的拍摄画面,现有的检测机器人不具有自动清理摄像镜头的功能,导致检测机器人的实用性受到限制,所以,需要设计一种地下通道检测机器人来解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种地下通道检测机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种地下通道检测机器人,包括检测机器人本体,检测机器人本体上装配有摄像记录装置,所述检测机器人本体上固定套接有两个安装环,两个所述安装环上共同固定连接有安装筒,所述安装筒内设置有清理组件与密封件。
7.作为本实用新型的一种优选技术方案,所述清理组件包括气缸、安装板、清洁马达、清洁壳与清洁块,所述气缸安装在安装筒的内顶面,所述安装板固定连接在气缸的伸缩端末端,所述清洁马达安装在安装板的底面,所述清洁壳与清洁马达的输出轴末端相连接,所述清洁块设置在清洁壳的内面;
8.所述清洁壳与清洁块之间通过连接组件相互连接。
9.作为本实用新型的一种优选技术方案,所述密封件包括密封盖板、密封圈、两个铰链与两个拉簧,所述密封盖板安装在安装筒的底面,所述安装筒的底面开设有与密封盖板相适配的通口,所述密封圈粘接在密封盖板的侧面,两个所述铰链均安装在安装筒的底面与密封盖板上,两个所述拉簧的一端均与安装筒的底面相连接,两个所述拉簧的另一端均与密封盖板的侧面相连接。
10.作为本实用新型的一种优选技术方案,所述连接组件包括魔术贴子面与魔术贴母面,所述魔术贴子面粘接在清洁壳的内面,所述魔术贴母面粘接在清洁块的侧面。
11.作为本实用新型的一种优选技术方案,所述清洁壳与清洁块的形状均与摄像记录装置的形状相适配。
12.作为本实用新型的一种优选技术方案,所述清洁块由海面材料制成。
13.本实用新型具有以下有益效果:
14.1、通过设置安装筒、清理组件与密封件,在安装筒、清理组件与密封件的配合作用下,海面材料制成的清洁块能够摄像记录装置镜片上的水雾吸收擦拭干净,能够对摄像记录装置起到清理作用,保证摄像记录装置拍摄画面的清晰度,方便工作人员清楚的观察地下通道内的情况;
15.2、通过设置连接组件,清洁块通过魔术贴子面与魔术贴母面粘接在清洁壳的内面,方便工作人员对清洁块进行更换,提高了装置的实用性。
附图说明
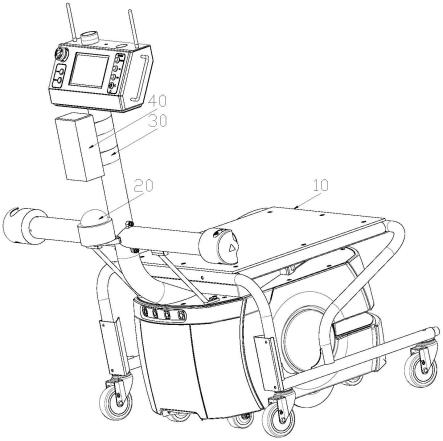
16.图1为本实用新型提出的一种地下通道检测机器人的结构示意图;
17.图2为本实用新型提出的一种地下通道检测机器人中安装筒内部的结构示意图。
18.图中:10检测机器人本体、20摄像记录装置、30安装环、40安装筒、50清理组件、501气缸、502安装板、503清洁马达、504清洁壳、505清洁块、60密封件、601密封盖板、602密封圈、602铰链、604拉簧、70连接组件、701魔术贴子面、702魔术贴母面。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1-2,一种地下通道检测机器人,包括检测机器人本体10,检测机器人本体10上装配有摄像记录装置20,具体的,摄像记录装置20可为360
°
全景摄像头,检测机器人本体10上固定套接有两个安装环30,两个安装环30上共同固定连接有安装筒40,安装筒40内设置有清理组件50与密封件60。
21.参照图1-2,清理组件50包括气缸501、安装板502、清洁马达503、清洁壳504与清洁块505,气缸501安装在安装筒40的内顶面,安装板502固定连接在气缸501的伸缩端末端,清洁马达503安装在安装板502的底面,清洁壳504与清洁马达503的输出轴末端相连接,清洁块505设置在清洁壳504的内面,具体的,气缸501与清洁马达503的控制方式为成熟的现有技术,并不作为本技术方案的创新点,图中并未示出,在此也不做过多赘述;
22.清洁壳504与清洁块505之间通过连接组件70相互连接。
23.参照图1-2,密封件60包括密封盖板601、密封圈602、两个铰链603与两个拉簧604,密封盖板601安装在安装筒40的底面,安装筒40的底面开设有与密封盖板601相适配的通口,密封圈602粘接在密封盖板601的侧面,两个铰链603均安装在安装筒40的底面与密封盖板601上,两个拉簧604的一端均与安装筒40的底面相连接,两个拉簧604的另一端均与密封盖板601的侧面相连接,无需对摄像记录装置20进行清理时,在两个拉簧604的弹力作用下,密封盖板601能够与安装筒40的底面紧密贴合,如此设置使得气缸501与清洁马达503能够处于相对密封的环境中,对气缸501与清洁马达503起到保护作用。
24.参照图1-2,连接组件70包括魔术贴子面701与魔术贴母面702,魔术贴子面701粘接在清洁壳504的内面,魔术贴母面702粘接在清洁块505的侧面,方便工作人员对清洁块505进行更换。
25.参照图1-2,清洁壳504与清洁块505的形状均与摄像记录装置20的形状相适配。
26.参照图1-2,清洁块505由海面材料制成,便于清洁块505吸收附着在摄像记录装置20镜头上的水分。
27.本实用新型的具体工作原理如下:
28.本实用新型所提出的检测机器人本体10在使用时,初始状态下,在两个拉簧604的弹力作用下,密封盖板601能够与安装筒40的底面紧密贴合,并把通口堵住,需要对摄像记录装置20进行清理时,工作人员可使气缸501通电运转,气缸501运转时能够带动安装板502、清洁马达503与清洁壳504向下移动,清洁壳504能够对密封盖板601进行挤压,使得密封盖板601发生转动,接着,清洁壳504与清洁块505能够移动到安装筒40的外部,并与摄像记录装置20的镜片相互贴合,接着,工作人员使清洁马达503通电运转,清洁马达503运转时能够带动清洁壳504发生转动,清洁壳504转动时能够带动清洁块505发生转动,海面材料制成的清洁块505能够摄像记录装置20镜片上的水雾吸收擦拭干净,能够对摄像记录装置20起到清理作用。
29.清洁块505通过魔术贴子面701与魔术贴母面702粘接在清洁壳504的内面,方便工作人员对清洁块505进行更换。
30.需要说明的是,气缸501与清洁马达503的控制方式为成熟的现有技术,并不作为本技术方案的创新点,图中并未示出,在此也不做过多赘述。
31.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1