一种自动化搬运机械臂的制作方法
1.本实用新型涉及机械臂技术领域,尤其是涉及一种自动化搬运机械臂。
背景技术:
2.机器人手臂通常指一种可编程的,具有与人类手臂相似功能的机械臂;该臂可以是一个完整的机械装置,也可以是更复杂的机器人的一部分,在各大加工制作行业中,为了较好的提高生产效率,通常需要使用自动化机械臂对货物或材料的搬运,现有自动化搬运机械臂在对玻璃搬运过程中,由于玻璃表面存在污渍,且自动化搬运机械臂上缺乏对污渍进行清扫的结构,因此,易影响自动化搬运机械臂对玻璃搬运的稳定性和安全性,此外,现有自动化搬运机械臂难以根据玻璃的尺寸大小调整真空吸附罩对玻璃的吸附位置,灵活性不足,不利于对自动化搬运机械臂对玻璃的搬运,其次,现有自动化搬运机械臂在使用时,内部的电力元件一般是直接的与外界电源进行连接,在突然断电的情况下将会导致内部的电力元件无法进行运行,导致自动化机械臂难以对玻璃进行搬运。
技术实现要素:
3.本实用新型的目的是提供一种自动化搬运机械臂,以解决现有自动化搬运机械臂存在的问题。
4.一种自动化搬运机械臂,包括机座和转台,所述转台转动连接于机座上表面;
5.所述机座左上端设置有支撑台,所述支撑台上设有调节组件,所述调节组件包括调节座、真空吸附罩和真空管,所述调节座设有多个并分别分布于支撑台上下两侧表面,所述真空吸附罩设有多个并分别固定于所述调节座左侧,所述真空管设有多根并分别与所述真空吸附罩连接;
6.所述支撑台左端设有清洁板,所述清洁板右端固定有固定杆,所述支撑台内部中间设置有传动杆,所述机座内底部左侧设置有备用电源。
7.优选的,所述机座内部转动连接有两个前后分布的传动齿轮,两个所述传动齿轮相互齿合,前端所述传动齿轮与外部驱动装置连接,后端所述传动齿轮上端与转台上表面固定。
8.优选的,所述转台上端活动连接有第一机械臂,所述第一机械臂活动连接有固定座,所述固定座左端固定有第二机械臂,所述支撑台固定于第二机械臂左端。
9.优选的,所述支撑台内部右侧固定有电机,所述电机输出端与传动杆固定。
10.优选的,所述固定杆右端贯穿支撑台并嵌入传动杆内,所述传动杆内部固定有与所述固定杆连接的弹簧,所述传动杆内壁前后侧均开设有滑动槽,所述固定杆外表面前后侧均固定有滑动嵌入滑动槽内的凸块。
11.优选的,所述支撑台前后两侧表面均固定有真空泵,所述真空管内端与真空泵固定,所述支撑台内部上下端分别设有多个电动缸,所述电动缸输出端与调节座下表面固定。
12.有益效果是:
13.通过在机座内设置的备用电源,且备用电源在正常通电的情况处于充电状态,当出现断电的情况时,备用电源能够为整个机械臂进行供电,防止在机械臂对玻璃搬运过程中因断电而出现难以对玻璃进行搬运的问题,实用性较高。
14.通过固定杆、传动杆和清洁板的结合,能较快的实现对玻璃表面污渍的清扫,便于真空吸附罩更好的对玻璃进行吸附固定,防止玻璃在搬运过程中出现玻璃脱离影响搬运的情况,通过固定杆与传动杆的伸缩设置,便于真空吸附罩对玻璃表面进行吸附固定。
15.通过设置调节座、真空吸附罩、真空管和电动缸,通过让电动缸带动调节座上下移动,并同时让真空吸附罩随调节座移动,便于使用者根据玻璃的尺寸大小调整真空吸附罩在玻璃上的吸附位置,以便于提高真空吸附罩对玻璃吸附的稳定性和对玻璃搬运的安全性,实用性较高。
附图说明
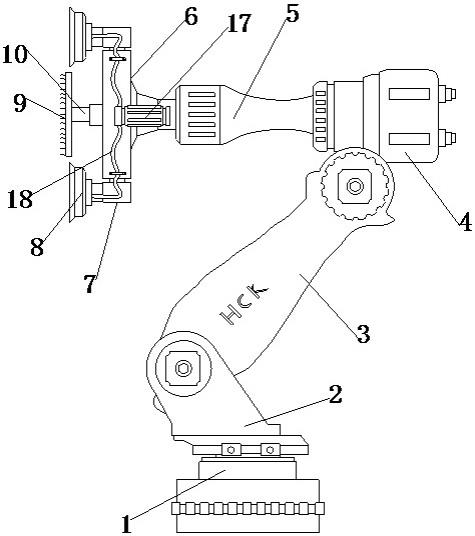
16.图1为本实用新型的整体主视平面结构示意图;
17.图2为本实用新型的机座与转台主视剖面结构示意图;
18.图3为本实用新型的支撑台主视剖面结构示意图;
19.图4为本实用新型传动杆与固定杆俯视剖面结构示意图。
20.图中标记:机座1、转台2、第一机械臂3、固定座4、第二机械臂5、支撑台6、调节座7、真空吸附罩8、清洁板9、固定杆10、备用电源11、传动齿轮12、电动缸13、电机14、传动杆15、弹簧16、真空泵17、真空管18、凸块19。
具体实施方式
21.参见图1至图4,本技术是一种自动化搬运机械臂,包括机座1和转台2,所述转台2转动连接于机座1上表面,所述机座1内部转动连接有两个前后分布的传动齿轮12,两个所述传动齿轮12相互齿合,前端所述传动齿轮12与外部驱动装置连接,后端所述传动齿轮12上端与转台2上表面固定,所述转台2上端活动连接有第一机械臂3,所述第一机械臂3活动连接有固定座4,所述固定座4左端固定有第二机械臂5,所述机座1左上端设置有支撑台6,所述支撑台6固定于第二机械臂5左端,所述机座1内底部左侧设置有备用电源11;
22.在对本实用新型进使用时,通过让外部驱动装置带动前端传动齿轮12转动,由于两个传动齿轮12相互齿合,而后端传动齿轮12上端与转台2固定,因此,在两个传动齿轮12的齿合下转台2会进行转动,随后转台2便会调整第一机械臂3、第二机械臂5、固定座4和支撑台4的方向,便于后续对玻璃进行搬运操作,同时,通过在机座1内设置的备用电源11,且备用电源11在正常通电的情况处于充电状态,当出现断电的情况时,备用电源11能够为整个机械臂进行供电,防止在机械臂对玻璃搬运过程中因断电而出现难以对玻璃进行搬运的问题,实用性较高;
23.所述支撑台6左端设有清洁板9,所述清洁板9右端固定有固定杆10,所述支撑台6内部中间设置有传动杆15,所述支撑台6内部右侧固定有电机14,所述电机14输出端与传动杆15固定,所述固定杆10右端贯穿支撑板6并嵌入传动杆15内,所述传动杆15内部固定有与所述固定杆10连接的弹簧16,所述传动杆15内壁前后侧均开设有滑动槽,所述固定杆10外表面前后侧均固定有滑动嵌入滑动槽内的凸块19,所述支撑台6上设有调节组件,所述调节
组件包括调节座7、真空吸附罩8和真空管18;
24.在对玻璃进行搬运时,通过让第二机械臂5带动支撑台6移动至玻璃所在位置,之后,支撑台6上的清洁板9会与玻璃表面接触,随后,通过接通电机14的电源并使其带动传动杆15转动,之后,在传动杆15的转动下固定杆10会带动清洁板9转动,之后转动的清洁板9便会对玻璃表面存在的污渍进行清扫,在此过程中,由于固定杆10右端嵌入传动杆15内,且凸块19与滑动槽滑动连接,而固定杆10与弹簧16固定,因此,在清洁板9抵在玻璃表面时,固定杆10会深入传动杆15内,且弹簧16受到固定杆10的挤压产生清扫收缩,而凸块19沿滑动槽滑动,以此,通过固定杆10、传动杆15和清洁板9的结合,能较快的实现对玻璃表面污渍的清扫,便于真空吸附罩8更好的对玻璃进行吸附固定,防止玻璃在搬运过程中出现玻璃脱离影响搬运的情况,通过固定杆10与传动杆15的伸缩设置,便于真空吸附罩8对玻璃表面进行吸附固定;
25.所述调节座7设有多个并分别分布于支撑台6上下两侧表面,所述真空吸附罩8设有多个并分别固定于所述调节座7左侧,所述真空管18设有多根并分别与所述真空吸附罩8连接,所述支撑台6前后两侧表面均固定有真空泵17,所述真空管18内端与真空泵17固定,所述支撑台6内部上下端分别设有多个电动缸13,所述电动缸13输出端与调节座7下表面固定;
26.进一步的,在完成对玻璃表面污渍的清扫后,通过让真空吸附罩8与玻璃表面接触,之后让真空泵17通过真空管18抽空真空吸附罩8与玻璃之间的空气,能让真空吸附罩8与玻璃之间的连接更为稳定,之后便可对玻璃进行搬运操作,在此过程中,通过让电动缸13通电并使其推动调节座7上下移动,由于真空吸附罩8固定于调节座7左侧,因此,在调节座7上下移动的同时真空吸附罩8也会一同移动,当调节座7带动真空吸附罩8移动至合适的位置后关闭电动缸13,之后重复上述操作并让真空吸附罩8与玻璃表面接触,之后通过真空泵17与真空管18的结合便可对玻璃进行吸附固定,最后便可对玻璃进行搬运操作,因此,通过让电动缸13带动调节座7上下移动,并同时让真空吸附罩8随调节座7移动,便于使用者根据玻璃的尺寸大小调整真空吸附罩8在玻璃上的吸附位置,以便于提高真空吸附罩8对玻璃吸附的稳定性和对玻璃搬运的安全性,实用性较高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1