一种智能互动机器人
1.本实用新型涉及机器人领域,特别是涉及一种智能互动机器人。
背景技术:
2.随着科技的发展,机器人的使用越来越普遍。目前市场的一些智能互动机器人只能进行语音交流,无法自行移动,功能比较单一,无法满足多种交互需求。
技术实现要素:
3.基于此,本实用新型的目的在于提供一种能够自行移动的智能互动机器人。
4.本实用新型的智能互动机器人包括运动单元和语音交互单元,所述语音交互单元设在所述运动单元上;所述运动单元包括基座、主控制器、驱动电机和驱动轮,所述主控制器和驱动电机设置在所述基座上,所述驱动轮套设在所述驱动电机的轴上,所述驱动电机与所述主控制器电连接;所述主控制器用于控制所述驱动电机的转动;所述语音交互单元包括设在所述基座上的esp32模块、麦克风和扬声器,所述麦克风和扬声器与所述esp32模块电连接;所述麦克风用于接收用户发出的语音,并传输至所述esp32模块,所述esp32模块用于将语音答复信号传输至所述扬声器,所述扬声器用于将语音答复信号转换成声音。
5.与现有技术相比,本实用新型的智能互动机器人包括运动单元,本实用新型可通过运动单元进行移动,使用更方便。
6.进一步地,所述驱动电机为两个,分别设在所述基座的两侧;所述驱动轮为两个,分别设在两个所述驱动电机的轴上。
7.进一步地,所述运动单元还包括牛眼轮,所述牛眼轮设在所述基座前侧的下方。
8.进一步地,所述esp32模块与所述主控制器电连接,所述esp32模块用于发送控制指令至所述主控制器,所述主控制器根据接收到的控制指令控制所述驱动电机的转动。
9.进一步地,所述主控制器为stm32模块。
10.进一步地,所述运动单元还包括红外寻迹模块和引导图案,所述红外寻迹模块设在所述基座的底部,所述引导图案设在地面上,所述红外寻迹模块与所述主控制器电连接;所述红外寻迹模块用于对设在地面上的所述引导图案进行检测,并将图案检测信号传输至所述主控制器,所述主控制器根据接收到的图案检测信号控制所述驱动电机的转动。
11.进一步地,所述运动单元还包括超声波模块,所述超声波模块设在所述基座的上方,所述超声波模块与所述主控制器电连接;所述超声波模块用于对周围物体的距离进行检测,并将距离检测信号传输至所述主控制器,所述主控制器根据接收到的距离检测信号控制所述驱动电机的转动。
12.进一步地,所述运动单元还包括舵机,所述舵机设在所述基座上,所述超声波模块与所述舵机的轴连接,所述舵机与所述主控制器电连接;所述主控制器用于控制所述舵机旋转,从而调整所述超声波模块的探测方向。
13.进一步地,还包括文字识别单元,所述文字识别单元包括设在所述基座上的
openmv模块和显示器,所述openmv模块和显示器分别与所述主控制器电连接;所述openmv模块用于获取图像并对图像中的文字进行识别,再将文字识别结果传输至所述主控制器,所述主控制器用于控制显示器显示文字识别结果。
14.进一步地,所述显示器为点阵显示模块。
附图说明
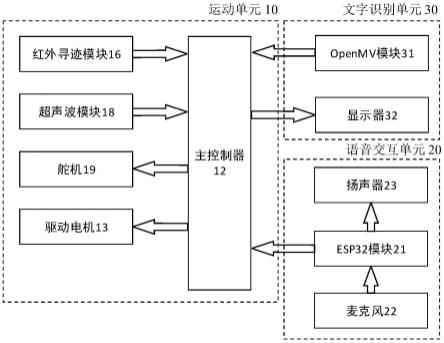
15.图1为本实用新型的智能互动机器人的电路结构示意图;
16.图2为本实用新型的智能互动机器人的外部结构图;
17.图3为本实用新型的智能互动机器人的爆炸图。
18.图中:10、运动单元;11、基座;12、主控制器;13、驱动电机;14、驱动轮;15、牛眼轮;16、红外寻迹模块;18、超声波模块;19、舵机;20、语音交互单元;21、esp32模块;22、麦克风;23、扬声器;30、文字识别单元;31、openmv模块;32、显示器;40、电池。
具体实施方式
19.以下是本实用新型的具体实施例,并结合附图对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
20.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.需要说明的是,当元件被称为“固定于”另一个元件,它可以是直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
22.如图1-3所示,本实用新型的智能互动机器人包括运动单元10和语音交互单元20,语音交互单元20设在运动单元10上,可随运动单元10进行移动。
23.运动单元10包括基座11、主控制器12、驱动电机13和驱动轮14,主控制器12和驱动电机13设置在基座11上,驱动轮14套设在驱动电机13的轴上,驱动电机13与主控制器12电连接;主控制器12用于控制驱动电机13的转动,从而使基座11能够移动。在一个具体的实施例中,主控制器12为stm32模块。
24.语音交互单元20包括设在基座11上的esp32模块21、麦克风22和扬声器23,麦克风22和扬声器23分别与esp32模块21电连接;麦克风22用于接收用户发出的语音,并转换成语音信号传输至esp32模块21,esp32模块21用于将接收到的语音信号转换成语音答复信号,并将语音答复信号传输至扬声器23,扬声器23用于将语音答复信号转换成声音,以此实现用户和本实用新型的智能互动机器人之间的语音对话。
25.为了使运动单元10能够实现转向,在一个具体实施例中,驱动电机13为两个,分别设在基座11的两侧;驱动轮14为两个,分别套设在两个驱动电机13的轴上,主控制器12控制两个驱动电机13以不同速度或方向进行转动即可实现转向。
26.为了使运动单元10的移动更顺畅,在一个优选实施例中,运动单元10还包括牛眼
轮15,牛眼轮15设在基座11前侧的下方;在其他实施例中,也可以使用万向轮替代牛眼轮15。
27.为了使运动单元10能够按照用户的语音指令进行移动,在一个优选实施例中,esp32模块21与主控制器21电连接,esp32模块21用于将语音信号转换成控制指令,并将控制指令发送至主控制器12,主控制器12根据接收到的控制指令控制驱动电机13的转动,以实现语音控制本实用新型进行前进、后退、转弯和旋转等运动。
28.为了使运动单元10能够沿着设定的路径移动,在一个优选的实施例中,运动单元10还包括红外寻迹模块16和引导图案,红外寻迹模块16设在基座11的底部,引导图案设在地面上,红外寻迹模块16与主控制器12电连接;红外寻迹模块16用于对设在地面上的引导图案进行检测,并将图案检测信号传输至主控制器12,主控制器12根据接收到的图案检测信号控制驱动电机13的转动。具体的,红外寻迹模块16包括红外发射器和红外接收器,引导图案包括与设定的路径一致的黑色线条,红外发射器发出的红外光照射到黑色线条,红外接收器接收黑色线条的反射光,并将接收到的反射光的强度转换成图案检测信号传输至主控制器12,主控制器12根据接收到的图案检测信号的强度变化来判断运动单元10的偏离程度,并根据偏离程度控制驱动电机13的转动,以修正运动单元10的位置偏差,使运动单元10能够跟随引导图案的黑色线条运动。
29.运动单元10在移动的过程中可能会遇到障碍物,与障碍物发生碰撞容易导致各零部件的损坏,影响本实用新型的智能互动机器人的正常运行;在一个优选实施例中,运动单元10还包括超声波模块18,超声波模块18设在基座11的上方,并与主控制器12电连接;超声波模块18用于对周围物体的距离进行检测,并将距离检测信号传输至主控制器12,主控制器12根据接收到的距离检测信号控制驱动电机13的运动,使运动单元10能够避开障碍物。具体的,超声波模块18包括超声波发射器和超声波接收器,超声波发射器将超声波发射到被检测物体上,然后超声波被反射到超声波接收器,主控制器12根据超声波发射和接收的时间差即可计算出被检测物体的距离。
30.为了增大超声波模块18的检测范围,在一个优选实施例中,运动单元10还包括舵机19,舵机19设置在基座11上,超声波模块18与舵机19的轴连接,舵机19与主控制器12电连接;主控制器12用于控制舵机19的旋转,从而调整超声波模块18的探测方向。在其他实施例中,运动单元10包括设在基座11上的步进电机,超声波模块18与步进电机的轴连接,步进电机与主控制器12电连接,主控制器12用于控制步进电机的旋转,从而调整超声波模块的探测方向。
31.为了进一步增加交互方式,实现文字识别与显示的功能,在一个优选实施例中,还包括文字识别单元30,文字识别单元30包括设在基座上的openmv模块31和显示器32,openmv模块31和显示器32分别与主控制器12电连接;openmv模块31用于获取文字图像,并对文字图像进行识别,再将文字识别结果传输至主控制器12,主控制器12用于控制显示器32显示文字识别结果。在一个具体的实施例中,显示器32为点阵显示模块。
32.为了让本实用新型摆脱供电线的约束,能够进行更大范围的移动,在一个优选实施例中,本实用新型还包括电池40,电池40用于为主控制器12、驱动电机13、红外寻迹模块16、超声波模块18、舵机19、esp32模块21、麦克风22、扬声器23、openmv模块31以及显示器32供电。
33.与现有技术相比,本实用新型的有益效果如下:
34.1、包括运动单元,可通过运动单元进行移动,使用更方便;
35.2、设置了超声波模块,防止与障碍物发生碰撞;
36.3、还包括文字识别单元,增加了文字识别与显示的互动方式,提升用户的互动体验。
37.以上各实施例涉及的文字识别方法、语音交互方法、语音控制方法、红外寻迹方法和超声波测距方法均为现有技术,本实用新型不涉及方法的改进。
38.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1