一种物料箱夹取夹具的制作方法
1.本实用新型涉及仓储物流设备领域,尤其是涉及一种物料箱夹取夹具。
背景技术:
2.现有技术中原有夹具运用气缸只能夹取纸箱或者塑料箱,设备的兼容性不高,夹取的纸箱或者塑料箱的尺寸相对固定,并且只能夹取一种(要么纸箱,要么塑料箱)。夹取的物料箱材质变化时,需要手动更换夹具,影响夹取效率。因此,需要设计一种物料箱夹取夹具,提高的设备的兼容性,使一套夹具既能夹取纸箱,也可以夹取塑料箱。
3.中国专利申请公开号cn209023812u,公开日为2019年06月25日,名称为“一种纸箱生产用堆码设备”,公开了种纸箱生产用堆码设备,包括堆码机器人本体,还包括紧固机构和防护机构,所述堆码机器人本体包括夹取滑座、滑动夹板、夹取滑座支臂、中转支臂和机器人底座,所述紧固机构安装在滑动夹板的侧表面,所述紧固机构包括伸缩橡胶板和伸缩弹簧,所述夹取滑座的内部设置有夹取滑道,所述滑动夹板的内部设置有伸缩卡槽,所述伸缩弹簧位于伸缩卡槽的内部。但是该设备只适用于纸箱的夹取,仍未解决上述问题。
技术实现要素:
4.本实用新型为了克服现有技术中的不足,提供一种物料箱夹取夹具,提高的设备的兼容性,使一套夹具既能夹取纸箱,也可以夹取塑料箱。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.一种物料箱夹取夹具,包括:
7.连接法兰,其用于与机械臂连接;
8.固定架,连接法兰的一端与固定架固定;
9.塑料箱夹紧机构,其用于从两侧夹紧塑料箱,塑料箱夹紧机构设置在固定架的下方且与固定架固定;
10.纸箱夹紧机构,其用于从夹紧上端开口的纸箱的上沿,纸箱夹紧机构设置在固定架的下方且与固定架固定。
11.上述技术方案中,纸箱夹紧机构和塑料箱夹紧机构错开分布,分别用于夹取纸箱和塑料箱。夹取夹具通过连接法兰固定在机械臂上,通过机械臂进行整体移动。物料搬运作业过程:步骤1:输送线一上停靠着从托盘库出来的待拆包的物料。步骤2:机器人利用复合夹具上的纸箱夹具(如果物料是纸箱)或者塑料箱夹具(如果物料是塑料箱)对物料进行夹取。步骤3:通过机器人自身旋转将输送线一上的整托的物料夹取到输送线二上。步骤4:重复进行2,3步骤,直至将输送线一上的所有物料拆包到输送线二上。此机器人夹具既可以夹取纸箱也可以夹取塑料箱,做到一机两用,是机器人进行拆包堆叠物料的不可或缺的专用工具,尤其是解决了传统的只能夹取纸箱或者塑料箱的难题。从而实现了物料出库拆包,入库堆叠过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。采用铝合金机架,自重较轻且耐腐蚀。
12.作为优选,所述塑料箱夹紧机构的数量为两个,两个塑料箱夹紧机构分别设置在固定架的相对两侧。所述结构使塑料箱夹紧机构可以从两侧夹紧塑料箱。
13.作为优选,所述塑料箱夹紧机构包括伸缩气缸、夹紧板和导向轴,导向轴和伸缩气缸分别与固定架固定,夹紧板与导向轴横向滑动连接,伸缩气缸的伸缩轴与夹紧板固定。此夹具采用压缩空气作为动力源,清洁无污染,动力传递简单可靠。
14.作为优选,所述纸箱夹紧机构的数量为四个,四个纸箱夹紧机构分别设置在靠近固定架四个角的位置上。从四个方向夹紧,且夹紧纸箱靠近边角的位置,可以使夹紧关系更加稳定。
15.作为优选,所述纸箱夹紧机构包括平行型气动手指和两个夹持板,两个夹持板分别与平行型气动手指的两个移动臂固定。此夹具采用压缩空气作为动力源,清洁无污染,动力传递简单可靠。两个夹持板可以夹紧纸箱的侧壁。
16.作为优选,所述纸箱夹紧机构还包括滑动轴、伸缩弹簧、接近开关和金属感应片,滑动轴与固定架固定,平行型气动手指通过滑动轴与固定架沿竖直方向滑动连接,伸缩弹簧的两端分别连接固定架和平行型气动手指,接近开关与固定架固定,金属感应片与平行型气动手指固定且靠近接近开关。纸箱有形变时,可能导致纸箱夹紧机构无法对准纸箱的侧壁,纸箱上沿无法对准纸箱夹紧机构的中间位置,纸箱上与箱夹紧机构的其它位置接触,推动箱夹紧机构上移,使接近开关与金属感应片发生感应,并进行报警,避免意外情况发生。
17.作为优选,四个纸箱夹紧机构中的其中两个纸箱夹紧机构中的夹持板的夹紧方向与另外两个纸箱夹紧机构中的夹持板的夹紧方向垂直。所述结构可以使纸箱夹紧机构尽可能多夹紧几个边。
18.本实用新型的有益效果是:夹具既可以夹取纸箱也可以夹取塑料箱,做到一机两用,从而实现了物料出库拆包,入库堆叠过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。
附图说明
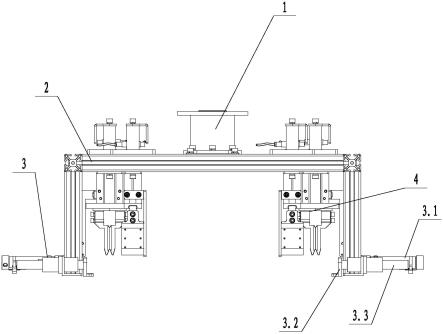
19.图1是本实用新型的主视图;
20.图2是本实用新型的仰视图;
21.图3是纸箱夹紧机构的结构示意图。
22.图中:连接法兰1、固定架2、塑料箱夹紧机构3、伸缩气缸3.1、夹紧板3.2、导向轴3.3、纸箱夹紧机构4、平行型气动手指4.1、夹持板4.2、滑动轴4.3、伸缩弹簧4.4、接近开关4.5、金属感应片4.6。
具体实施方式
23.下面结合附图和具体实施例对本实用新型做进一步的描述。
24.实施例1:
25.如图1和图2所示,一种物料箱夹取夹具,包括连接法兰1、固定架2、塑料箱夹紧机构3和塑料箱夹紧机构3,连接法兰1一端与机械臂连接,连接法兰1的另一端与固定架2固定;所述塑料箱夹紧机构3的数量为两个,两个塑料箱夹紧机构3分别设置在固定架2的相对
两侧。塑料箱夹紧机构3设置在固定架2的下方且与固定架2固定;所述塑料箱夹紧机构3包括伸缩气缸3.1、夹紧板3.2和导向轴3.3,导向轴3.3和伸缩气缸3.1分别与固定架2固定,夹紧板3.2与导向轴3.3横向滑动连接,伸缩气缸3.1的伸缩轴与夹紧板3.2固定。
26.如图1和图2所示,所述纸箱夹紧机构4的数量为四个,四个纸箱夹紧机构4分别设置在靠近固定架2四个角的位置上。纸箱夹紧机构4设置在固定架2的下方且与固定架2固定。如图3所示所述,纸箱夹紧机构4包括平行型气动手指4.1、两个夹持板4.2、滑动轴4.3、伸缩弹簧4.4、接近开关4.5和金属感应片4.6,两个夹持板4.2分别与平行型气动手指4.1的两个移动臂固定。滑动轴4.3与固定架2固定,平行型气动手指4.1通过滑动轴4.3与固定架2沿竖直方向滑动连接,伸缩弹簧4.4的两端分别连接固定架2和平行型气动手指4.1,接近开关4.5与固定架2固定,金属感应片4.6与平行型气动手指4.1固定且靠近接近开关4.5。四个纸箱夹紧机构4中的其中两个纸箱夹紧机构4中的夹持板的夹紧方向与另外两个纸箱夹紧机构4中的夹持板的夹紧方向垂直。
27.上述技术方案中,纸箱夹紧机构4和塑料箱夹紧机构3错开分布,分别用于夹取纸箱和塑料箱。夹取夹具通过连接法兰1固定在机械臂上,通过机械臂进行整体移动。物料搬运作业过程:步骤1:输送线一上停靠着从托盘库出来的待拆包的物料。步骤2:机器人利用复合夹具上的纸箱夹具(如果物料是纸箱)或者塑料箱夹具(如果物料是塑料箱)对物料进行夹取。步骤3:通过机器人自身旋转将输送线一上的整托的物料夹取到输送线二上。步骤4:重复进行2,3步骤,直至将输送线一上的所有物料拆包到输送线二上。此机器人夹具既可以夹取纸箱也可以夹取塑料箱,做到一机两用,是机器人进行拆包堆叠物料的不可或缺的专用工具,尤其是解决了传统的只能夹取纸箱或者塑料箱的难题。从而实现了物料出库拆包,入库堆叠过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。采用铝合金机架,自重较轻且耐腐蚀。纸箱有形变时,可能导致纸箱夹紧机构4无法对准纸箱的侧壁,纸箱上沿无法对准纸箱夹紧机构4的中间位置,纸箱上与箱夹紧机构的其它位置接触,推动箱夹紧机构上移,使接近开关4.5与金属感应片4.6发生感应,并进行报警,避免意外情况发生。
28.本实用新型的有益效果是:夹具既可以夹取纸箱也可以夹取塑料箱,做到一机两用,从而实现了物料出库拆包,入库堆叠过程的全自动化,大幅提高了工作效率,降低了企业的生产成本。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1