一种末端接触感测装置、机器人末端结构及机器人的制作方法
1.本技术涉及机器人技术领域,尤其涉及一种末端接触感测装置、机器人末端结构及机器人。
背景技术:
2.目前机器人模块比如足端、机械臂末端等末端结构中通常设置有接触感测装置。相关技术中,有一些机器人末端结构中通过设置气体腔室,并通过气压传感的方式实现接触的感测,这种方式,其对气体腔室的要求较高,且可能设置较为复杂的气路,一旦气体腔室出现漏气的情况,会严重影响接触感测的感测能力。也有一些机器人采用应变桥原理通过在机器人末端结构中贴设应变片的方式实现接触的感测。这种方式,需要对应变片进行校正,制造工艺复杂,且应变片贴设的区域或角度容易受到具体结构的限制,容易造成一些方向上的接触感测不到,从而影响接触感测的感测能力。
技术实现要素:
3.本技术提供一种末端接触感测装置、机器人末端结构及机器人,以提高末端接触的感测能力。
4.根据本技术实施例的第一方面,提供一种末端接触感测装置,包括支撑结构及传感器,所述支撑结构的外表面为外凸的曲面,所述传感器布设于所述支撑结构的外表面上。
5.在一些实施例中,所述传感器为薄膜压力传感器。
6.在一些实施例中,所述传感器呈螺旋状排布于所述支撑结构的外表面上。
7.在一些实施例中,所述支撑结构的外表面为球冠状表面。
8.在一些实施例中,所述支撑结构的材料为硬质材料。
9.根据本技术实施例的第二方面,提供一种机器人末端结构,所述机器人末端结构包括末端连接杆及如上所述的末端接触感测装置,所述末端接触感测装置组装于所述末端连接杆的外端,所述支撑结构的外表面位于背离所述末端连接杆的一侧。
10.在一些实施例中,所述机器人末端结构包括组装于所述末端连接杆外端的末端外壳,所述末端外壳内形成有一容设腔,所述支撑结构设于所述容设腔,且所述传感器与所述末端外壳之间间隔设置。
11.在一些实施例中,所述容设腔的至少部分具有与所述支撑结构的外表面相匹配的形状。
12.在一些实施例中,所述末端外壳的材料为高回弹材料。
13.在一些实施例中,所述机器人末端结构包括模数转换装置,所述模数转换装置中设有模数转换电路,所述模数转换装置设于所述支撑结构与所述末端连接杆的端部之间,并与所述传感器电连接。
14.根据本技术实施例的第三方面,提供一种机器人,其包括如上所述的机器人末端,其中,所述机器人末端为机器人足端或机器人的机械臂末端。
15.由上述实施例可知,本技术所述的末端接触感测装置、机器人末端结构及机器人,通过在支撑结构的具有曲面状外表面上布设传感器,使得末端接触感测装置能够通过布设于支撑结构的曲面状外表面的传感器感测到来自与支撑结构外表面相对的多个方向的接触,从而有利于提高末端接触的感测能力,且末端接触感测装置整体结构简单,方便加工生产。
附图说明
16.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是根据一示例性实施例示出的一种机器人末端结构的部分结构示意图;
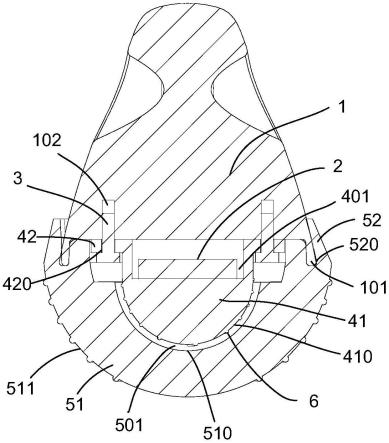
18.图2是根据一示例性实施例示出的一种机器人末端结构的部分结构的剖视图;
19.图3是根据一示例性实施例示出的一种机器人末端结构的部分结构的分解示意图。
具体实施方式
20.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
21.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
22.应当理解,取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
23.本技术提供一种末端接触感测装置、机器人末端结构及机器人。其中,所述末端接触感测装置包括支撑结构及传感器,所述支撑结构的外表面为外凸的曲面,所述传感器布设于所述支撑结构的外表面上。上述末端接触感测装置,通过在支撑结构的具有曲面状外表面上布设传感器,使得末端接触感测装置能够通过布设于支撑结构的曲面状外表面的传感器感测到来自与支撑结构外表面相对的多个方向的接触,从而有利于提高末端接触的感测能力,且末端接触感测装置整体结构简单,方便加工生产。
24.这里所说的末端接触感测装置,可应用于机器人中,作为机器人末端结构的接触感测装置,用于识别机器人末端结构是否接触到其他物体或结构。相应地,机器人中设有能够与末端接触感测装置电连接的控制电路板、电源等结构,以便通过电源向末端接触感测装置供电,以及通过控制电路板控制末端接触感测装置工作及向末端接触感测装置获取相应的接触信号。
25.下面结合图1至图3对所述末端接触感测装置及相应地机器人末端结构进行详述
描述。
26.请参照图1,并在必要时结合图2和图3所示,机器人末端结构100包括末端连接杆1及组装于所述末端连接杆1的外端的末端接触感测装置。所述末端接触感测装置包括支撑结构4及传感器6。所述支撑结构4的外表面410为外凸的曲面。所述支撑结构4的外表面410位于背离所述末端连接杆的一侧。所述传感器6布设于所述支撑结构4的外表面410上,使得该传感器6能够感测曲面状外表面410相对的多个方向的接触。
27.请结合图2所示,在一些实施例中,这里支撑结构4可以通过螺钉3等固定件固定组装于末端连接杆1上。该支撑结构4具有像侧有外凸曲面的支撑主体41及位于支撑主体41外围的安装部42。该安装部设有第一安装孔420,末端连接杆1上对应设有与第一安装孔420对应的第二安装孔102。在支撑结构4组装于末端连接杆1时,螺钉3可穿过对应的第一安装孔420和第二安装孔102,而将二者固定于一起。
28.需要说明的是,在一些实施例中,支撑结构4的支撑主体41可以是实心结构,以很好地保证支撑结构的支撑强度。当然,在其它一些实施例中,支撑主体也可以是空心结构。
29.在一些实施例中,这里所说的传感器6为薄膜压力传感器,使得传感器整体占用空间小,并且感应能力较好。该薄膜压力传感器在接触到外界结构时,通过传感器6的连接端接入电路的电阻值会产生变化,使得末端接触感测装置的能够获得变化的电压信号,从而使得控制电路板能够该变化的电压信号判断出该传感器6接触到其他结构或物体。
30.这里传感器6可以通过打印、粘贴等方式布设于支撑结构4的外表面410上。
31.在一些实施例中,所述传感器6呈螺旋状排布于所述支撑结构4的外表面410上,使得传感器6的整体结构简单。
32.在一些实施例中,所述支撑结构4的外表面410为球冠状表面,使得支撑结构4的外表面410较为圆润,没有棱角,便于传感器6的排布设置,且能够更好地感测外界的接触。
33.在一些实施例中,所述支撑结构4的材料为硬质材料,以为传感器6提供较好的支撑,避免由于支撑结构4变形而带来的传感器6的感测结果不准确的情况的发生。
34.这里的硬质材料可以为金属或非金属硬质材料。当支撑结构4由金属材料形成时,其外表面410上可设置一层绝缘层,进而在所述绝缘层背离支撑结构4的外表面上设置所述传感器。
35.请结合图2所示,在一些实施例中,所述机器人末端结构100包括组装于所述末端连接杆1外端的末端外壳5,所述末端外壳5内形成有一容设腔501。所述支撑结构4设于所述容设腔501中,且所述传感器6与所述末端外壳5之间间隔设置,以保证在该机器人末端结构100未接触外接结构时,传感器6不受干扰。
36.在一些实施例中,具体的,该末端外壳5具有围设成容设腔501的内壁510及与内壁510相背离的外壁511。所述传感器6与末端外壳5的内壁510之间具有一间隙,从而防止在未受到外界接触力时,由于末端外壳5的内壁510接触到传感器6而带来的感测结果不准确的情况发生。
37.在一些实施例中,末端外壳5为整体与支撑结构4的外表面适配的弯曲状壳体,比如球冠状弯曲结构。所述容设腔501的至少部分具有与所述支撑结构4的外表面410相匹配的形状。比如,容设腔501中用于容设支撑结构4外表面410对应的部分可以呈相应的弯曲状,比如球冠状曲面,以使得传感器6与末端外壳5各部位的接触一致,且使得末端外壳5与
支撑结构4以及传感器6更好地适配,使得末端外壳5与支撑结构4以及传感器6能够更好地配合,从而使得机器人末端结构100具有更好地耐用性。
38.请结合图2所示,末端外壳5具有外壳主体51及位于外壳主体51朝向末端连接杆1一侧边缘的安装部52。所述末端连接杆1外端的边缘具有朝向末端外壳5一侧延伸的安装插接部101。该末端外壳5的安装部52中形成有开口朝向所述末端连接杆1所在一侧的配合插槽520。末端外壳5通过安装插接部101和配合插槽520的配合,组装于所述末端连接杆1的外端。
39.需要说明的是,在一些实施例中,所述末端外壳的材料为高回弹材料,比如橡胶、硅胶等。
40.请结合图2和图3所示,所述机器人末端结构100包括模数转换装置2。所述模数转换装置中设有模数转换电路。所述模数转换装置2设于所述支撑结构4与所述末端连接杆1的端部之间,并与所述传感器6电连接。
41.这里所说的模数转换装置2可以设于支撑结构4与所述末端连接杆1中的一个之上,也可以夹设于二者之间。比如请结合图2所示,支撑结构4朝向末端连接杆1的一侧中部设有安装腔401,模数转换装置2设于该安装腔401中。
42.这里传感器6具体可以通过模数转换装置2与相应的控制电路板连接。该模数转换装置2能够将通过传感器6所获取的电压信号(模拟信号)转换成数字信号,进而将该电压信号对应的数字信号传输给控制电路板,以便控制电路板可根据该电压信号对应的数字信号判断出机器人末端结构100是否与外界其他结构接触。
43.基于机器人末端结构100的上述结构,其整体结构简单轻便,能够感测多个方向的接触,有利于提高接触感测能力,且整体结构简单,有利于成本控制,并且有利于大规模加工及生产。
44.此外,本技术所提供的机器人,其可以包括上述的机器人末端。所述机器人末端为机器人足端或机器人的机械臂末端。
45.本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由下面的权利要求指出。
46.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1