一种送物机器人储柜的制作方法
1.本实用新型涉及机械人领域,尤其涉及一种送物机器人储柜。
背景技术:
2.现有的送餐机器人送餐过程中仅仅能够将物品运送至指定位置,然后通过取餐人员自己取餐,但很多场景需要机器人自己将物品放置在指定的桌台或者凳子等物体上而实现完全自动化,这时候就需要机器人不仅需要将物品运送至指定位置,而且还需要通过机械手将物品放置在送至指定对象上,从而避免要求取物人员必须在场或者适配一些取物人员无法到场的场景,例如:针对隔离酒店使用场景,就需要避免取物人员与送餐机器人接触。
3.中国专利文献公开号cn107283436a公开了一种桁架式自主移动送餐机器人,从上到下依次包括用于运送餐饮的桁架机械手、装有升降式托盘架和主控制箱的车体框架和用于行走的全向行走底盘;所述桁架机械手包括桁架,所述桁架包括两相对设置的桁架支撑外壳,两所述桁架支撑外壳之间活动设置有用于托起所述升降式托盘架上的餐盘的升降机构,两所述桁架支撑外壳内均活动设置有用于使所述升降机构水平向送餐的伸缩导轨。上述专利可以通过桁架机械手进行取物,但难以将物品放置在位于送餐机器人侧面的桌子或凳子上。
技术实现要素:
4.为了克服现有技术的缺陷,本实用新型所要解决的技术问题在于提出一种送物机器人储柜,能够将储物仓餐食等待取物品取出并放置在位于送物机器人储柜一侧的桌子或凳子等指定对象上,且无需限定待取物品的大小及类别。
5.为达此目的,本实用新型采用以下技术方案:
6.本实用新型提供的送物机器人储柜,包括具有柜门的柜壳体、储物仓以及位于所述柜壳体内的取物机械手,所述储物仓位于所述柜壳体内,所述取物机械手设于储物仓的一侧,所述取物机械手靠近所述柜门,所述储物仓远离所述柜门,所述柜壳体的侧面设置有出物口,且其位于所述取物机械手的一侧。
7.本实用新型进一步地技术方案在于,所述出物口处设置有与所述出物口的形状相适配的自动门。
8.本实用新型进一步地技术方案在于,所述柜壳体包括位于所述取物机械手一侧的侧封板,所述自动门包括活动门板、门同步带、行程轮及驱动电机,所述驱动电机固定在所述侧封板的顶部,所述驱动电机的输出轮与所述门同步带的一端相啮合,所述门同步带的另一端与所述行程轮相啮合,所述行程轮通过轮转轴及所述轮转轴两个端部的轴承固定在所述侧封板的两侧边中部,所述门同步带上设置有与活动门板相连的固定卡。
9.本实用新型进一步地技术方案在于,所述自动门还包括第一限位开关及第二限位开关,所述第一限位开关及所述第二限位开关沿所述侧封板的高度方向固定在所述侧封板
的一侧边上,所述第一限位开关位于所述第二限位开关的上方,所述活动门板的顶部设置有极限位置板,所述极限位置板位于所述第一限位开关与所述第二限位开关之间。
10.本实用新型进一步地技术方案在于,所述储物仓内设置有多个储物隔层,相邻的两个所述储物隔层之间的间距相等。
11.本实用新型进一步地技术方案在于,所述储物隔层包括至少一条的输送轨道及固定支架,所述输送轨道包括输送带及位于所述输送带两侧的隔板,所述输送带位于所述固定支架上,所述隔板位于输送带的两侧且所述隔板的底部固定在所述固定支架上。
12.本实用新型进一步地技术方案在于,还包括y轴升降器,所述y轴升降器的运动方向与所述储物仓的高度方向一致,所述取物机械手固定在所述y轴升降器上。
13.本实用新型进一步地技术方案在于,所述取物机械手包括由辊轴组成的置物云台及云梯托座,所述云梯托座与所述置物云台滑动配合,所述置物云台的端部位于所述出物口的一侧。
14.本实用新型进一步地技术方案在于,还包括底座,所述柜壳体固定在所述底座上。
15.本实用新型进一步地技术方案在于,所述柜门上设置有透明窗户,所述柜门的一侧边处设置有锁具。
16.本实用新型的有益效果为:
17.本实用新型提供的送物机器人储柜,在储物仓的一侧设置有取物机械手,可以通过取物机械手将待取物品送出位于柜壳体的出物口,从而达到将储物仓餐食等待取物品取出并放置在位于送物机器人储柜一侧的桌子或凳子等指定对象上的目的。此外,本技术提供的送物机器人储柜设置有与出物口相匹配的自动门,当出物口需要出物时自动门才打开,从而保证上述储柜内封闭无尘。
附图说明
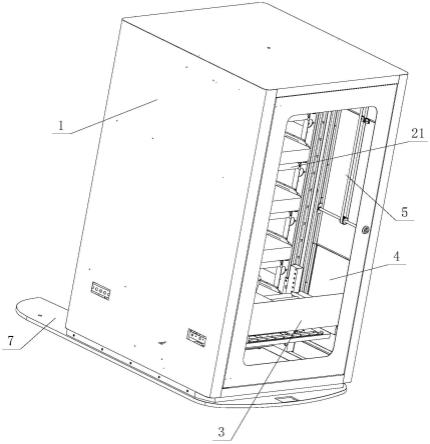
18.图1是本实用新型具体实施方式中提供的送物机器人储柜的立体图;
19.图2是本实用新型具体实施方式中提供的送物机器人储柜的正视图;
20.图3是本实用新型具体实施方式中提供的送物机器人储柜的立体图,去掉柜壳体;
21.图4是本实用新型具体实施方式中提供的图3的a局部示意图;
22.图5是本实用新型具体实施方式中提供的自动门的第一立体图;
23.图6是本实用新型具体实施方式中提供的自动门的第二立体图;
24.图7是本实用新型具体实施方式中提供的置物云台的局部立体图。
25.图中:
26.11、柜门;1、柜壳体;2、储物仓;3、取物机械手;4、出物口;5、自动门;12、侧封板;51、活动门板;52、门同步带;53、行程轮;54、驱动电机;541、输出轮;531、轮转轴;532、轴承;55、固定卡;56、第一限位开关;57、第二限位开关;58、极限位置板;21、储物隔层;22、输送轨道;23、固定支架;221、输送带;222、隔板;6、y轴升降器;31、置物云台;32、云梯托座;7、底座;111、透明窗户;112、锁具;311、辊轴;33、推物器;331、推板;332、推物同步带;333、推板电机;8、待取物品。
具体实施方式
27.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
28.如图1至图7所示,本实施例中提供的送物机器人储柜包括具有柜门11的柜壳体1、储物仓2、位于柜壳体1内的取物机械手3,其中,储物仓2中可以放置多层待取物品,取物机械手3可以将单个待取物品取出,储物仓2位于柜壳体1内,取物机械手3设于储物仓2的一侧,取物机械手3靠近柜门11,储物仓2远离柜门11,柜壳体1的侧面设置有出物口4,出物口4位于取物机械手3的一侧,具体工作时,取物机械手3先沿y轴运动将目标待取物品从储物仓2取出,然后在继续沿y轴运动运动使得取物机械手3的高度与出物口4的高度一致,接着取物机械手3水平运动将待取物品从出物口4送出,因此取物机械手3可将待取物品从位于柜壳体1的侧面的出物口4送出,从而将餐食等待取物品运送至送物机器人储柜一侧的桌子或凳子等指定对象上。
29.为了保证送物机器人储柜内封闭无尘,进一步地,出物口4处设置有与出物口4的形状相适配的自动门5,自动门5设置使得只有当自动门5打开才能够通过出物口4送出待取物品,从而避免外界灰尘等进入至送物机器人储柜内,从而保护及维持送物机器人储柜的无尘环境。进一步优选地,柜壳体1包括位于取物机械手3一侧的侧封板12,自动门5包括活动门板51、门同步带52、行程轮53及驱动电机54,驱动电机54固定在侧封板12的顶部,驱动电机54的输出轮541与门同步带52的一端相啮合,门同步带52的另一端与行程轮53相啮合,行程轮53通过轮转轴531及轮转轴531两个端部的轴承532固定在侧封板12两侧边的中部,门同步带52上设置有与活动门板51相连的固定卡55,活动门板51可相对于侧封板12上下移动的,具体工作时,驱动电机54驱动输出轮541旋转,输出轮541则带动门同步带52进行旋转,同步带52旋转时会带动与其相连的固定卡55进行上下升降,又由于活动门板51与同步带52通过固定卡55连接在一起,因此可带动活动门板51相对于侧封板12进行上下升降。
30.在进一步的实施例中,自动门5还包括第一限位开关56及第二限位开关57,第一限位开关56及第二限位开关57沿侧封板12的高度方向固定在侧封板12的一侧边上,第一限位开关56位于第二限位开关57的上方,活动门板51的顶部设置有极限位置板58,极限位置板58位于第一限位开关56与第二限位开关57之间,当极限位置板58跟随活动门板51上升碰到第一限位开关56时,则驱动电机54停止工作,活动门板51不再向上运动,同理,当极限位置板58跟随活动门板51下降碰到第二限位开关57,驱动电机54同样停止驱动活动门板51。
31.为了进一步增强储物仓2的储物能力,进一步地,储物仓2内设置有多个储物隔层21,相邻的两个储物隔层21之间的间距相等,储物隔层21可放置一个或者多个待取物品,而且无需限制待取物品的大小及类别。进一步优选地,储物隔层21包括至少一条的输送轨道22及固定支架23,输送轨道22包括输送带221及位于输送带221两侧的隔板222,多条输送带221通过隔板222隔开,并通过隔板222实现待取物品输送过程中的导向,输送带221位于固定支架23上,隔板222位于输送带221的两侧且隔板222的底部固定在固定支架23上。由于储物隔层21采用输送带221输送,取物机械手3也采用辊轴311及推物器33组成的输送结构,由于这些输送结构都不需要夹持待取物品,故其对待取物品的大小及类别的要求就大幅降低,这样就极大提升了送物机器人储柜适配多种待取物品的能力,例如:本技术提供的送物机器人储柜应用于送餐时,能够运送有袋包装的餐盒、无袋包装的餐盒、以及不同商家的不同形状餐盒。
32.本实施例中提供的送物机器人储柜还包括y轴升降器6,y轴升降器6的运动方向与储物仓2的高度方向一致,取物机械手3固定在y轴升降器6上,y轴升降器6能够驱动取物机械手3沿储物仓2的高度方向进行上下运动,从而使得取物机械手3能够在不同的储物隔层21拿取待取物品。
33.取物机械手3包括由辊轴311组成的置物云台31及云梯托座32,云梯托座32与置物云台31滑动配合,也即置物云台31可相对于云梯托座32进行水平运动,置物云台31的端部位于出物口4的一侧,置物云台31与云梯托座32进行水平运动并配合y轴升降器6,就能够取到送物机器人储柜中任意的待取物品,取到待取物品后通过辊轴311将待取物品进行运送到推物器33的工作位置,也即推物器33可推到的位置,然后通过推物器33可以将待取物品推到的出物口4,并通过出物口4送出至位于送物机器人储柜一侧的桌子或凳子等指定对象上。也即置物云台31还设置有推物器33,推物器33包括至少一个的推板331、推物同步带332以及推板电机333,推板电机333驱动推物同步带332旋转,至少一个的推板331固定在推物同步带332上,推物同步带332转动时,就会带动其上的推板331推动待取物品从置物云台31卸到桌子或凳子等指定对象上。
34.本实施例中提供的送物机器人储柜还包括底座7,柜壳体1固定在底座7上,底座7能够方便将送物机器人储柜固定在移动餐车上。此外,柜门11上设置有透明窗户111,柜门11的一侧边处设置有锁具112,其中,透明窗户111可以便于用户观察到送物机器人储柜内的工作情况,锁具112用于对柜门11上锁。
35.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1