一种基于协作机器人视觉识别检测系统的制作方法
1.本实用新型涉及视觉检测识别技术领域,具体为一种基于协作机器人视觉识别检测系统。
背景技术:
2.协作机器人,顾名思义,就是在机器人与人可以在生产线上协同作战,充分发挥机器人的效率及人类的智能;同时在生产时协作机器人常需要安装视觉识别设备对产品进行入库前需要对产品的信息进行记录,传统使用人眼对产品信息进行检测和识别,效率低下且准确率难以得到保障,随着技术的发展,出现了视觉检测识别装置,用工业识别器代替人眼去完成识别的功能,可以代替人工准确、高效识别出产品信息。
3.市面上常见的基于协作机器人视觉识别检测系统,其调节效果欠佳,视觉识别器难以根据产品的高度进行调节,降低了装置的实用性,且视觉识别器大多是固定的,在调整时较为不便。
技术实现要素:
4.本实用新型的目的在于提供一种基于协作机器人视觉识别检测系统,通过升降机构对视觉识别器的高度进行调节,从而提高适用范围,通过转动机构可调节视觉识别器的角度,省时省力,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于协作机器人视觉识别检测系统,包括箱体和转动箱,所述箱体的内腔设置有升降机构,所述转动箱位于箱体的顶部,所述转动箱的内腔设置有转动机构,所述箱体的底部栓接有设备箱,所述设备箱的底部栓接有安装板,所述箱体的正面通过合页铰接有箱门。
6.优选的,所述升降机构包括第一电机、蜗杆、蜗轮、丝杆、活动板、支撑腿、滑块和滑杆,所述设备箱的一侧装配有第一电机,所述第一电机的输出轴栓接有蜗杆,所述蜗杆的一侧贯穿设备箱并通过轴承转动连接于设备箱内腔的一侧。
7.优选的,所述蜗杆的正面传动连接有蜗轮,所述蜗轮的内腔平键连接有丝杆,所述丝杆的底部通过轴承转动连接于设备箱内腔的下壁,所述丝杆的顶部依次贯穿设备箱和箱体并通过轴承转动连接于箱体内腔的上壁。
8.优选的,所述丝杆的表面通过螺纹套螺纹连接有活动板,所述活动板顶部的四周均栓接有支撑腿,所述支撑腿的顶部均贯穿箱体并分别栓接于转动箱底部的四周,所述活动板的两侧均栓接有滑块,所述滑块的内腔均滑动连接有滑杆,所述滑杆的顶部和底部分别栓接于箱体内腔的上壁和下壁。
9.优选的,所述转动机构包括第二电机、主动锥齿轮、从动锥齿轮、第二旋转轴和限位块,所述转动箱内腔的一侧装配有第二电机,所述第二电机的输出轴栓接有第一旋转轴,所述第一旋转轴的一侧平键连接有主动锥齿轮,所述主动锥齿轮的一侧啮合有从动锥齿轮,所述从动锥齿轮的内腔平键连接有第二旋转轴,所述第二旋转轴的底部通过轴承转动
连接于转动箱内腔的下壁。
10.优选的,所述第二旋转轴的顶部贯穿转动箱并栓接有视觉识别器,所述视觉识别器底部的两侧均栓接有限位块,所述转动箱的顶部呈环形开设有与限位块配合使用的限位槽。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型提供一种基于协作机器人视觉识别检测系统,通过第一电机、蜗杆、蜗轮、丝杆、活动板、支撑腿、滑块和滑杆的配合,便于对视觉识别器的高度进行调节,使其处于不同的位置;利用第一电机带动蜗杆、蜗轮和丝杆进行转动,从而使活动板和支撑腿进行移动,进而使视觉识别器进行升降,由此满足视觉识别器的使用需求,极大的提高了视觉识别器的适用范围,适合推广使用。
13.2、本实用新型提供一种基于协作机器人视觉识别检测系统,通过第二电机、主动锥齿轮、从动锥齿轮、第二旋转轴和限位块的配合,便于使视觉识别器转动,并实现角度调节;利用第二电机带动主动锥齿轮、从动锥齿轮和第二旋转轴进行转动,从而改变视觉识别器的角度,调节便捷,使用方便,大大提高了装置的实用性。
附图说明
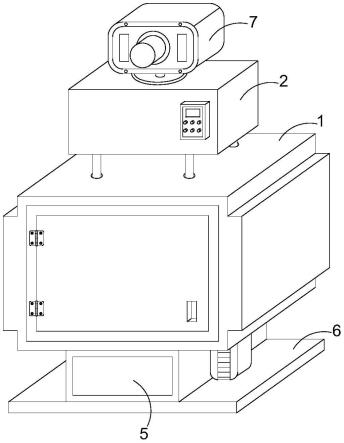
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的箱体剖视结构示意图;
16.图3为本实用新型的设备箱剖视结构示意图;
17.图4为本实用新型的转动箱剖视结构示意图。
18.图中标号:1、箱体;2、转动箱;3、升降机构;31、第一电机;32、蜗杆;33、蜗轮;34、丝杆;35、活动板;36、支撑腿;37、滑块;38、滑杆;4、转动机构;41、第二电机;42、主动锥齿轮;43、从动锥齿轮;44、第二旋转轴;45、限位块;5、设备箱;6、安装板;7、视觉识别器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.本实用新型提供了如图1~4所示的一种基于协作机器人视觉识别检测系统,包括箱体1和转动箱2,箱体1的内腔设置有升降机构3,转动箱2位于箱体1的顶部,转动箱2的内腔设置有转动机构4,箱体1的底部栓接有设备箱5,设备箱5的底部栓接有安装板6,通过安装板6可便于安装,箱体1的正面通过合页铰接有箱门,通过箱门便于操作人员进行检修。
21.升降机构3包括第一电机31、蜗杆32、蜗轮33、丝杆34、活动板35、支撑腿36、滑块37和滑杆38,设备箱5的一侧装配有第一电机31,第一电机31的输出轴栓接有蜗杆32,蜗杆32的一侧贯穿设备箱5并通过轴承转动连接于设备箱5内腔的一侧,通过第一电机31带动蜗杆32进行转动。
22.蜗杆32的正面传动连接有蜗轮33,蜗轮33的内腔平键连接有丝杆34,丝杆34的底部通过轴承转动连接于设备箱5内腔的下壁,丝杆34的顶部依次贯穿设备箱5和箱体1并通
过轴承转动连接于箱体1内腔的上壁,通过蜗杆32的转动带动蜗轮33和丝杆34进行转动。
23.丝杆34的表面通过螺纹套螺纹连接有活动板35,活动板35顶部的四周均栓接有支撑腿36,通过丝杆34的转动带动活动板35和支撑腿36进行移动,支撑腿36的顶部均贯穿箱体1并分别栓接于转动箱2底部的四周,活动板35的两侧均栓接有滑块37,滑块37的内腔均滑动连接有滑杆38,滑杆38的顶部和底部分别栓接于箱体1内腔的上壁和下壁,通过滑块37和滑杆38对活动板35起到限位和支撑的作用。
24.转动机构4包括第二电机41、主动锥齿轮42、从动锥齿轮43、第二旋转轴44和限位块45,转动箱2内腔的一侧装配有第二电机41,第二电机41的输出轴栓接有第一旋转轴,第一旋转轴的一侧平键连接有主动锥齿轮42,主动锥齿轮42的一侧啮合有从动锥齿轮43,从动锥齿轮43的内腔平键连接有第二旋转轴44,第二旋转轴44的底部通过轴承转动连接于转动箱2内腔的下壁,通过第二电机41带动主动锥齿轮42、从动锥齿轮43和第二旋转轴44转动,从而使视觉识别器7进行转动。
25.第二旋转轴44的顶部贯穿转动箱2并栓接有视觉识别器7,视觉识别器7为现有技术,在此不做多余地叙述,视觉识别器7底部的两侧均栓接有限位块45,转动箱2的顶部呈环形开设有与限位块45配合使用的限位槽,通过限位块45和限位槽对视觉识别器7进行限位和支撑,使其转动更加稳定。
26.具体使用时,使用者通过开启第一电机31,使蜗杆32转动,并依次带动蜗轮33和丝杆34进行转动,从而使活动板35带动支撑腿36移动,进而实现对视觉识别器7的高度调节,极大的提高了视觉识别器7适用范围;使用者通过开启第二电机41,使主动锥齿轮42转动,并依次带动从动锥齿轮43和第二旋转轴44进行转动,从而使视觉识别器7转动并实现角度调节,结构简单,使用方便,大大提高了装置的实用性。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1