一种机器人底座和机器人
1.本实用新型属于机器人技术领域,具体涉及一种机器人底座和机器人。
背景技术:
2.机器人,通常包含底座和功能部分,功能部分位于底座的上方,底座包括座体和行走组件,行走组件可以采用行走轮、履带轮等构造,行走组件设置于底座上,能够带动底座行走。功能部分多种多样,例如可以为机械手、摄影组件、点餐组件等。
3.机器人的底座,行走机构的位置通常是固定的,例如,申请号为2021223055019,专利名称为“一种基于物联网的安防巡检智能机器人”的专利中,行走轮的位置及间距等固定。若行走轮之间的间距过大,会使机器人更加稳定,不容易倾倒,但是会占用较大的面积,不适用于窄小的地形;若行走轮之间的间距较小,会使机器人不稳定,机器人重心较高或受到外力推动时容易倾倒,存在一定的安全隐患。
技术实现要素:
4.鉴于此,本实用新型实施例的目的在于提供一种机器人底座和机器人,可以通过调整第二行走组件伸展或收缩折叠,控制机器人底座的不同状态,适用于不同的地形。第二行走组件伸展时,能够接触地面行走,机器人较为稳定,不容易倾倒,当第二行走组件收缩折叠时,第二行走组件接触地面行走,占地面积更小,适用于窄小的地形。
5.本实用新型的实施例是这样实现的:
6.本实用新型实施例提供了一种机器人底座,包括座体、第一行走组件和第二行走组件,所述第一行走组件设置于所述座体的底部,所述第二行走组件设置于所述座体的中部且能够伸展及收缩折叠;所述机器人底座具有所述第二行走组件收缩折叠至所述座体中部且所述第一行走组件与地面接触的第一状态,以及所述第二行走组件向外向下伸展至所述座体两侧且与地面接触的第二状态。
7.作为上述实施例的可选方案,所述机器人底座处于所述第二状态时,所述行走组件位于所述第一行走组件的外侧。
8.作为上述实施例的可选方案,所述机器人底座设置有四个所述第一行走组件,所述第一行走组件包括行走架、行走轮和缓冲组件,所述行走架横向设置且可转动的设置于所述座体底部,所述行走轮转动设置于所述行走架上,所述缓冲组件的两端分别与所述座体和所述行走架铰接。
9.作为上述实施例的可选方案,所述缓冲组件包括伸缩臂和缓冲弹簧,所述伸缩臂的两端分别与所述座体和所述行走架铰接,所述缓冲弹簧套设于所述伸缩臂上。
10.作为上述实施例的可选方案,所述行走架设置有顶端开口的容纳腔,所述容纳腔内设置有用于驱动所述行走轮的驱动电机,所述行走架的两侧分别设置有所述缓冲组件。
11.作为上述实施例的可选方案,所述行走轮采用麦克纳姆轮。
12.作为上述实施例的可选方案,所述机器人底座包括两个左右设置的所述第二行走
组件,所述第二行走组件包括履带轮和两个伸缩架,两个所述伸缩架间隔设置,所述伸缩架包括多个相互铰接的伸缩臂,所述伸缩架的一端与所述座体铰接且另一端与所述履带轮铰接。
13.作为上述实施例的可选方案,相邻的两根所述伸缩臂之间、所述伸缩臂与所述座体之间、以及所述伸缩臂与所述履带轮之间均通过马达驱动旋转。
14.作为上述实施例的可选方案,所述履带轮的表面间隔设置有多个防滑块,所述防滑块沿所述履带轮的宽度方向延伸。
15.作为上述实施例的可选方案,所述座体的中部设置有搁置台,所述搁置台沿水平方向设置,所述机器人底座处于所述第一状态时,所述第二行走组件支撑于所述搁置台上。
16.作为上述实施例的可选方案,所述座体上还设置有遮挡板,所述遮挡板位于所述搁置台的上方,所述遮挡板与所述搁置台间隔设置且中间形成临时存放区,所述机器人底座处于所述第一状态时,所述第二行走组件收缩于所述临时存放区内。
17.本实用新型实施例还提供了一种机器人,包括功能部件和上述的机器人底座,所述功能部件设置于所述机器人底座的上方。
18.本实用新型的有益效果是:
19.本实用新型提供的机器人,功能部件用于实现机器人的主要功能,机器人底座用于带动功能部件到达指定的工作位置。第一行走组件的位置及间隔基本不变,间隔较小,第二行走组件能够伸展和收缩折叠,用户可以根据通道的宽窄选择性地使用第一行走组件或第二行走组件进行驱动。第二行走组伸展时,能够接触地面行走,机器人较为稳定,不容易倾倒,当第二行走组件收缩折叠时,第二行走组件接触地面行走,占地面积更小,可以在狭窄的通道内行走。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。通过附图所示,本实用新型的上述及其它目的、特征和优势将更加清晰。在全部附图中相同的附图标记指示相同的部分。并未刻意按实际尺寸等比例缩放绘制附图,重点在于示出本实用新型的主旨。
21.图1为本实用新型实施例提供的机器人的结构示意图一;
22.图2为本实用新型实施例提供的机器人的结构示意图二;
23.图3为本实用新型实施例提供的机器人的结构示意图三;
24.图4为本实用新型实施例提供的机器人底座的结构示意图一;
25.图5为本实用新型实施例提供的机器人底座的结构示意图二;
26.图6为本实用新型实施例提供的机器人底座的结构示意图三;
27.图7为本实用新型实施例提供的机器人底座的结构示意图四;
28.图8为本实用新型实施例提供的机器人底座的结构示意图五;
29.图9为本实用新型实施例提供的机器人底座的结构示意图(去除遮挡板)。
30.图标:
31.10-机器人;
32.11-功能部件;12-机器人底座;
33.110-主体;111-药物分装器;112-摄像头;113-机械臂;
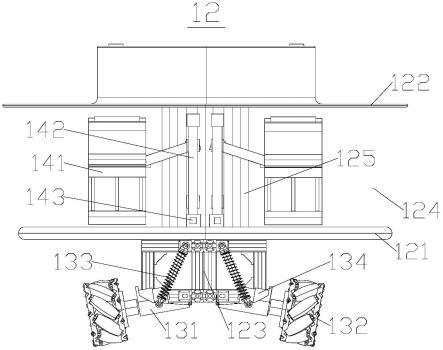
34.120-座体;121-搁置台;122-遮挡板;123-安装架;124-临时存放区;125-立柱;
35.130-第一行走组件;131-行走架;132-行走轮;133-缓冲组件;134-驱动电机;
36.140-第二行走组件;141-履带轮;142-伸缩架;143-马达;144-防滑块。
具体实施方式
37.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
38.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
40.此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
41.请参照图1-图3所示,本实用新型的实施例提供了一种机器人10,该机器人10能够代替部分人工实现某些特定功能,可以适用于不同领域。
42.其中,机器人10包括功能部件11和机器人底座12,功能部件11设置于机器人底座12的上方。
43.功能部件11的结构及功能不限,例如,功能部件11可以为机械手、摄影机、点餐组件等。
44.在本实施例中,以医疗机器人10为例:功能部件11包括主体110、药物分装器111、摄像头112、机械臂113等。
45.其中,主体110可转动地设置于机器人底座12上,主体110的转动轴线沿竖向设置,主体110的转动由电机驱动,主体110与机器人底座12的转动结构,可以参照现有技术。
46.药物分装器111位于主体110的中部,形成不同的格子,格子内可以放置药物,同时,每个格子内可以配备重力感应装置。
47.摄像头112位于主体110的顶部,主要用于观察周围的环境,便于控制机器人10。
48.机械臂113用于取放物品,机械臂113的数量可以为两个,两个机械臂113位于主体110的两侧,机械臂113可以采用四轴机械臂113,当然,机械臂113也可以采用现有技术中其他结构的机械臂113,在此不再赘述。
49.此外,主体110上还可以设置血压计、扬声器、显示屏等。
50.需要说明的是,上述功能部件11的结构仅用于作为举例说明,并不会对机器人底座12的结构产生影响。在其他实施例中,功能部件11可以实现其他功能,一般而言,绝大部
分功能的功能部件11都可以安装在本实施例提供的机器人底座12上,在此不再一一赘述。
51.机器人底座12用于带动功能部件11到达指定位置进行工作,具体的,请参照图4-图9所示,机器人底座12包括座体120、第一行走组件130和第二行走组件140。
52.底座的结构不限,在本实施例中,底座包括搁置台121、遮挡板122和安装架123。
53.搁置台121与遮挡板122之间可以间隔设置,遮挡板122位于搁置台121的上方,搁置台121和遮挡板122均可以沿水平方向设置,在本实施例中,搁置台121和遮挡板122均可以采用圆形板状结构。
54.搁置台121与遮挡板122之间通过立柱125连接,立柱125的数量及尺寸等不限。搁置台121与遮挡板122之间形成临时存放区124。
55.此外,在搁置台121上或遮挡板122上还可以设置其他结构,例如,遮挡板122上方设置有用于与主体110转动配合的环形挡板等。
56.安装架123位于搁置台121的底部,第一行走组件130可以与安装架123连接,安装架123的结构不限,在本实施例中,安装架123采用框架结构,例如矩形框架结构,在安装架123的两端可以设置安装部等,安装部与第一行走组件130配合。
57.安装架123与搁置台121之间的连接方式不限,例如,二者之间焊接、一体成型、螺栓连接等。
58.第一行走组件130位于安装架123上,第一行走组件130的数量不限,例如一个、两个、三个等,在本实施例中,第一行走组件130的数量为四个。
59.具体的,第一行走组件130包括行走架131、行走轮132和缓冲组件133。
60.行走架131沿横向设置,并且行走架131与座体120底部之间铰接,行走架131的转动轴线沿水平延伸,行走架131能够上下摆动。
61.行走架131的形状不限,在本实施例中,行走架131设置有顶端开口的容纳腔,容纳腔内设置有驱动电机134,驱动电机134用于驱动行走轮132转动。
62.行走轮132转动设置于行走架131上,行走轮132可以为万向轮、滚轮等,在本实施例中,行走轮132采用麦克纳姆轮,行走轮132与驱动电机134的输出轴连接,二者的轴线重合。
63.四个行走轮132均采用麦克纳姆轮,并且每个行走轮132均通过一个独立的驱动电机134驱动,通过控制不同的驱动电机134转速不同,实现多方位行走。
64.行走架131上下摆动时,能够带动行走轮132上下活动,起到缓冲的作用,并且,由于行走架131横向设置,在崎岖路面上行走时,可以尽可能减小对机器人10的冲击。
65.行走架131的两侧分别设置有缓冲组件133,缓冲组件133可以为弹簧、伸缩气缸等。在本实施例中,缓冲组件133包括伸缩臂和缓冲弹簧,伸缩臂的两端分别与座体120和行走架131铰接,缓冲弹簧套设于伸缩臂上。
66.伸缩臂位于行走架131的上方,伸缩臂能够伸缩,伸缩臂、行走架131、座体120形成一条边的边长可变的三角形,即随着行走架131的上下摆动,伸缩臂的长度能够变化,缓冲弹簧使伸缩臂具有伸长的趋势。
67.第一行走组件130的位置及间距不会发生明显变化,由于第一行走组件130位于座体120的正下方,间距较小,能够在较为狭窄的路段行走,但是这种行走方式,容易倾倒,因此,本实施例增设了第二行走组件140,使得机器人10在较宽的路段行走时更加稳定。
68.具体的,第二行走组件140设置于座体120的中部,第二行走组件140能够伸展及收缩折叠。
69.第二行走组件140的结构不限,当第二行走组件140伸展时,请参照图8所示,机器人底座12处于第一状态,第二行走组件140能够伸展至座体120的两侧,并且,第二行走组件140与地面抵触,此时,第一行走组件130可以与地面接触,也可以不与地面接触。此时,第二行走组件140行走时,能够带动机器人10前进;当第二行走组件140收缩折叠时,请参照图6所示,机器人底座12处于第二状态,第二行走组件140能够收缩至座体120中部,第二行走组件140脱离地面,并且,第二行走组件140与机器人10中心的间距减小,不会影响机器人10的正常行走,此时,第二行走组件140与地面接触,并且,第二行走组件140带动机器人10前进,第一行走组件130不工作。
70.在本实施例中,当第二行走组件140收缩折叠时,能够完全收缩至临时存放区124内,此时,临时存放区124可以保护第二行走组件140,第二行走组件140不容易磕碰外物,并且,第二行走组件140与搁置台121接触,搁置台121对第二行走组件140形成支撑。
71.第二行走组件140的数量不限,例如,一个、两个、四个等,当第二行走组件140的数量为一个时,伸展时最好配合第一行走组件130共同前进。
72.在本实施例中,第二行走组件140的数量为两个,两个第二行走组件140沿机器人底座12的左右方向设置。机器人底座12处于第二状态时,行走组件位于第一行走组件130的外侧,即两个第二行走组件140分别位于座体120的两侧,并且,第一行走组件130位于两个第二行走组件140之间。
73.第二行走组件140的结构可以采用但不限于下列方案:第二行走组件140包括履带轮141和伸缩架142。
74.履带轮141的结构可以参照现有技术,主要由电机驱动的主动轮、从动轮和履带等组成。
75.在本实施例中,履带轮141的表面设置有多个防滑块144,防滑块144沿履带轮141的宽度方向延伸,多个防滑块144间隔设置。
76.伸缩架142的数量为两个,两个伸缩架142间隔设置,伸缩架142包括多个相互铰接的伸缩臂,伸缩架142的一端与座体120铰接且另一端与履带轮141铰接。
77.在本实施例中,履带轮141沿机器人10的左右方向伸展或收缩,伸缩臂的轴线需要沿机器人10的前后方向延伸,即伸缩臂的转动轴线与履带轮141的伸展方向垂直。
78.相邻的两根伸缩臂之间、伸缩臂与座体120之间、以及伸缩臂与履带轮141之间均通过马达143驱动旋转。马达143可以采用现有技术中的微型马达143,马达143的体积较小,马达143转动时,能够带动两根伸缩臂相对转动,或者带动伸缩臂与与座体120之间、以及伸缩臂与履带轮141之间相对转动。当然,同一个第二行走组件140的两个伸缩架142中,可以仅在其中一个伸缩架142上设置马达143,也可以同时在两个伸缩架142上设置马达143。
79.在其他实施例中,第二行走组件140还可以采用下列方案:第二行走组件140的数量为四个,第二行走组件140包括伸缩架142和麦克纳姆轮,并且,四个第二行走组件140呈矩形分布。
80.本实施例提供的机器人10的使用方法如下(假定机器人10的初始状态为第二行走组件140收缩折叠至临时存放区124内):
81.此时,第一行走组件130与地面接触,此时,机器人10的占地面积较小,可以在较窄的路段行走,也可以在较宽的路段行走;
82.需要对机器人10形成稳定支撑时,控制多个马达143独立转动,伸缩架142逐渐展开,履带轮141向外、向下运动,直至履带轮141与地面接触,此时,第一行走轮132也可以与地面接触;
83.第一行走组件130和第二行走组件140共同驱动机器人10前进(在其他实施例中,第一行走组件130可以脱离地面,此时,第二行走组件140驱动机器人10前进),机器人10可以在较宽的路面行走,并且,机器人10更加稳定,不容易倾倒;
84.当机器人10遇到较窄路段时,控制多个马达143独立转动,伸缩架142逐渐折叠,履带轮141向上、向内运动,直至履带轮141被完全收纳至临时存放区124内,第一行走组件130支撑机器人10;
85.第一行走组件130驱动机器人10前进;
86.机器人10到达指定位置后,功能部件11根据预设程序或远程控制指令,实现相应的功能。
87.上述步骤可以根据需要增加、删除、修改、调整顺序等。
88.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1