一种施工安全管控机器人的制作方法
1.本实用新型属于施工领域,特别涉及一种施工安全管控机器人。
背景技术:
2.高速公路运营一段时间后,在自然环境车辆荷载等因素的综合影响下,路侧设备和路基路面往往会出现质量缺陷,需要开展施工养护修复存在的质量问题,在施工养护作业中由于施工封闭作业时间较长、占道多、工期紧、施工人员多、往往存在较大的安全隐患。如果缺乏有效的安全管理措施和手段,容易引发安全事故,造成人民群众人身损害和财产损失。
3.目前高速公路现场施工的管控手段,主要采用路政巡检的方式,路政管理人员按班次周期性的对辖区内所有施工场地的异常状况进行人工巡检。但是人工巡检存在一定的问题,人工巡检时,管控手段较单一难以适应全面管控的施工场景。高速公路距离较长,人工巡检耗时较长,对于施工点的管控难以做到及时发现问题。人工巡检不能对现场施工界面的相关信息数字化,存档记录,对于异常事件的发生难以追溯。人工管控时施工现场不具备自主检测计算能力,无法对施工现场的异常状况主动上报、主动预警。
技术实现要素:
4.针对背景技术中提到的问题,本实用新型的目的是提供一种施工安全管控机器人,以解决人工巡检时管控手段较单一,不方便及时发现问题,且不能随时存档记录,对于异常事件的发生难以追溯的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种施工安全管控机器人,包括控制仓,所述控制仓的底部四个拐角处固定安装有脚轮,所述控制仓的正面下端开设有滑槽,所述滑槽的内部滑动连接有抽拉式拉手,所述控制仓的顶部左右两侧均固定连接有安装座,所述安装座的内部均固定安装有机械摇臂,所述机械摇臂的末端固定连接有指示旗,所述控制仓的顶部中端固定安装有气动升降杆,所述气动升降杆的输出端固定连接有安装板,所述安装板的顶部固定安装有蜗杆云台,所述蜗杆云台的顶部固定连接有安装仓,所述安装仓的内部固定安装有前置摄像机,所述安装仓的底部前端固定安装有毫米波雷达,所述安装仓的左右两侧均固定安装有播音喇叭,所述安装仓的顶部固定安装有爆闪指示灯。
7.通过采用上述技术方案,设置控制仓,控制仓内部用于安装控制组件,脚轮使得该机器人方便进行移动,控制仓正面的滑槽中安装有抽拉式拉手,当需要带动该机器人进行转移时,工作人员即可将抽拉式拉手抽出,以便拉拽移动该机器人,安装座的内部用于安装机械摇臂,机械摇臂进行工作,即可带动指示旗进行摇动,以便实现该机器人的摇旗功能,气动升降杆进行工作,即可带动安装板及其顶部组件进行升降,蜗杆云台进行工作,即可进行360度转动,以便带动安装仓上安装的各种组件进行转动,以便对各个方向进行检测,前置摄像机用于对施工场地周边的状况进行视频检测,同时对过往的车辆进行图像抓拍,毫
米波雷达用于对过往车辆的车速和距离进行检测,播音喇叭用于实现机器人的远程广播功能,爆闪指示灯安装在最上方,爆闪指示灯进行工作,即可起到交通警示的作用。
8.进一步地,作为优选技术方案,所述控制仓的底部四个拐角处均固定连接有底盘脚杯。
9.通过采用上述技术方案,设置底盘脚杯,底盘脚杯用于提高该机器人停下时的稳定性,以免该机器人停下时出现滑动的情况。
10.进一步地,作为优选技术方案,所述控制仓的顶部左右两侧均固定连接有握把。
11.通过采用上述技术方案,设置握把,握把用于为工作人员提供施力点,以便工作人员平时移动该机器人。
12.进一步地,作为优选技术方案,所述控制仓的正面设有封闭门,所述封闭门的正面设有锁孔,所述封闭门的正面上端开设有抽拉槽。
13.通过采用上述技术方案,设置封闭门,工作人员使用钥匙通过锁孔即可打开封闭门,以便对控制仓内部的组件进行维修调整,抽拉槽用于为工作人员提供施力点,以便更轻松的打开封闭门。
14.进一步地,作为优选技术方案,所述蜗杆云台的左右两侧均通过螺栓安装有连接板,所述连接板的另一端均与安装仓的底部相连接。
15.通过采用上述技术方案,设置连接板,连接板通过螺栓安装在蜗杆云台的两侧,使得连接板具备方便拆装的功能,连接板的另一端与安装仓的底部相连接,以便对安装仓与蜗杆云台之间进行加固。
16.进一步地,作为优选技术方案,所述控制仓的内部中端固定连接有隔板,所述控制仓的内部底部固定安装有蓄电池,所述隔板的顶部固定安装有嵌入式控制器。
17.通过采用上述技术方案,设置隔板,隔板用于对控制仓的内部空间进行分割,以便有序的安装不同设备,蓄电池用于为该机器人的正常运行进行供电,嵌入式控制器用于对机器人的供能、运算处理、存储、通信进行控制。
18.进一步地,作为优选技术方案,所述控制仓的顶部后端两侧均固定安装有信号天线。
19.通过采用上述技术方案,设置信号天线,信号天线用于提高该机器人的信号强度,以便其可以更好的与外界设备进行无线连接。
20.综上所述,本实用新型主要具有以下有益效果:
21.第一、通过设置气动升降杆,气动升降杆进行工作,即可带动安装板及其顶部组件进行升降,蜗杆云台进行工作,即可进行360度转动,以便带动安装仓上安装的各种组件进行转动,以便实现360度无死角对各个方向进行检测的作用,以便提高检测的全面性;
22.第二、通过设置前置摄像机,前置摄像机用于对施工场地周边的状况进行视频检测,同时对过往的车辆进行图像抓拍,毫米波雷达用于对过往车辆的车速和距离进行检测,通过前置摄像机与毫米波雷达进行检测,使其具备存档记录的功能,以便在异常事件发生之后,可以进行记录追溯;
23.第三、通过设置播音喇叭,播音喇叭使得该机器人具备远程广播的功能,以便对来往车辆与人员进行警示播报,爆闪指示灯安装在最上方,爆闪指示灯进行工作,即可起到交通警示的作用,机械摇臂进行工作,即可带动指示旗进行摇动,以便使得该机器人具备摇旗
指示的功能。
附图说明
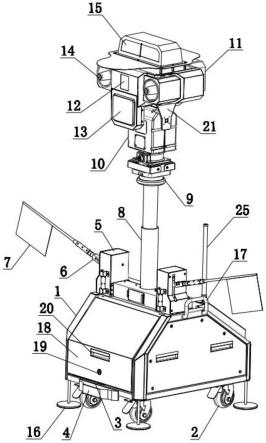
24.图1是本实用新型的立体图;
25.图2是本实用新型的正面示意图;
26.图3是本实用新型的侧视图;
27.图4是本实用新型的底部示意图;
28.图5是本实用新型的控制仓内部结构示意图。
29.附图标记:1、控制仓,2、脚轮,3、滑槽,4、抽拉式拉手,5、安装座,6、机械摇臂,7、指示旗,8、气动升降杆,9、安装板,10、蜗杆云台,11、安装仓,12、前置摄像机,13、毫米波雷达,14、播音喇叭,15、爆闪指示灯,16、底盘脚杯,17、握把,18、封闭门,19、锁孔,20、抽拉槽,21、连接板,22、隔板,23、蓄电池,24、嵌入式控制器,25、信号天线。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.实施例1
32.参考图1-5,本实施例所述的一种施工安全管控机器人,包括控制仓1,控制仓1的底部四个拐角处固定安装有脚轮2,控制仓1的正面下端开设有滑槽3,滑槽3的内部滑动连接有抽拉式拉手4,控制仓1的顶部左右两侧均固定连接有安装座5,安装座5的内部均固定安装有机械摇臂6,机械摇臂6的末端固定连接有指示旗7,控制仓1的顶部中端固定安装有气动升降杆8,气动升降杆8的输出端固定连接有安装板9,安装板9的顶部固定安装有蜗杆云台10,蜗杆云台10的顶部固定连接有安装仓11,安装仓11的内部固定安装有前置摄像机12,安装仓11的底部前端固定安装有毫米波雷达13,安装仓11的左右两侧均固定安装有播音喇叭14,安装仓11的顶部固定安装有爆闪指示灯15。
33.为了达到使得该机器人具备全方位检测,对来往车辆信息、施工周边环境进行记录的目的,安装座5的内部用于安装机械摇臂6,机械摇臂6进行工作,即可带动指示旗7进行摇动,以便实现该机器人的摇旗功能,气动升降杆8进行工作,即可带动安装板9及其顶部组件进行升降,蜗杆云台10进行工作,即可进行360度转动,以便带动安装仓11上安装的各种组件进行转动,以便对各个方向进行检测,前置摄像机12用于对施工场地周边的状况进行视频检测,同时对过往的车辆进行图像抓拍,毫米波雷达13用于对过往车辆的车速和距离进行检测,播音喇叭14用于实现机器人的远程广播功能,爆闪指示灯15安装在最上方,爆闪指示灯15进行工作,即可起到交通警示的作用。
34.实施例2
35.参考图1-4,在实施例1的基础上,为了达到提高该机器人放置时稳定性的目的,本实施例对稳定方式进行了创新设计,具体地,控制仓1的底部四个拐角处均固定连接有底盘脚杯16,设置底盘脚杯16,底盘脚杯16用于提高该机器人停下时的稳定性,以免该机器人停
下时出现滑动的情况。
36.参考图1-4,为了达到方便工作人员拉动该机器人的目的,本实施例控制仓1的顶部左右两侧均固定连接有握把17,设置握把17,握把17用于为工作人员提供施力点,以便工作人员平时移动该机器人。
37.参考图1-2,为了达到方便对控制仓1内部组件进行维修的目的,本实施例控制仓1的正面设有封闭门18,封闭门18的正面设有锁孔19,封闭门18的正面上端开设有抽拉槽20,设置封闭门18,工作人员使用钥匙通过锁孔19即可打开封闭门18,以便对控制仓1内部的组件进行维修调整,抽拉槽20用于为工作人员提供施力点,以便更轻松的打开封闭门18。
38.实施例3
39.参考图1-3,本实施例在实施例2的基础上,为了达到对安装仓11连接处进行加固的目的,本实施例对加固方式进行了创新设计,具体地,蜗杆云台10的左右两侧均通过螺栓安装有连接板21,连接板21的另一端均与安装仓11的底部相连接,设置连接板21,连接板21通过螺栓安装在蜗杆云台10的两侧,使得连接板21具备方便拆装的功能,连接板21的另一端与安装仓11的底部相连接,以便对安装仓11与蜗杆云台10之间进行加固。
40.参考图5,为了达到方便对机器人的运行进行控制的目的,本实施例控制仓1的内部中端固定连接有隔板22,控制仓1的内部底部固定安装有蓄电池23,隔板22的顶部固定安装有嵌入式控制器24,设置隔板22,隔板22用于对控制仓1的内部空间进行分割,以便有序的安装不同设备,蓄电池23用于为该机器人的正常运行进行供电,嵌入式控制器24用于对机器人的供能、运算处理、存储、通信进行控制。
41.参考图1-3,为了达到提高机器人信号强度的目的,本实施例控制仓1的顶部后端两侧均固定安装有信号天线25,设置信号天线25,信号天线25用于提高该机器人的信号强度,以便其可以更好的与外界设备进行无线连接。
42.使用原理及优点:在使用该机器人时,工作人员将抽拉式拉手4抽出,即可拉拽移动该机器人,脚轮2使得该机器人方便进行移动,底盘脚杯16用于提高该机器人停下时的稳定性,以免该机器人停下时出现滑动的情况,控制仓1内部空间通过隔板22进行分割,蓄电池23用于为该机器人的正常运行进行供电,嵌入式控制器24用于对机器人的供能、运算处理、存储、通信进行控制,信号天线25用于提高该机器人的信号强度,以便其可以更好的与外界设备进行无线连接,气动升降杆8进行工作,即可带动安装板9及其顶部组件进行升降,蜗杆云台10进行工作,即可进行360度转动,以便带动安装仓11上安装的各种组件进行转动,以便实现360度无死角对各个方向进行检测的作用,以便提高检测的全面性,前置摄像机12用于对施工场地周边的状况进行视频检测,同时对过往的车辆进行图像抓拍,毫米波雷达13用于对过往车辆的车速和距离进行检测,通过前置摄像机12与毫米波雷达13进行检测,使其具备存档记录的功能,以便在异常事件发生之后,可以进行记录追溯,播音喇叭14使得该机器人具备远程广播的功能,以便对来往车辆与人员进行警示播报,爆闪指示灯15安装在最上方,爆闪指示灯15进行工作,即可起到交通警示的作用,机械摇臂6进行工作,即可带动指示旗7进行摇动,以便使得该机器人具备摇旗指示的功能。
43.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1