一种无人机高空施工作业检测的机械手的制作方法
1.本实用新型涉及机械手技术领域,具体为一种无人机高空施工作业检测的机械手。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机加行业应用,是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途。
3.无人机在铁塔外壁进行施工作业检测时,需要一直保持悬停,其扇叶始终处于转动状态,即很大部分电量需要用在悬停上,导致其检测时间较短,为此本实用新型提出一种新型的解决方案。
技术实现要素:
4.本实用新型的目的在于提供一种无人机高空施工作业检测的机械手,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种无人机高空施工作业检测的机械手,包括固定底板,固定底板顶部固定连接有第一支撑柱和支撑结构,第一支撑柱和支撑结构顶部通过第一转动结构转动连接有第一转动块,第一转动块底部固定连接有电动推杆,电动推杆底部固定连接有连接块,连接块底部固定连接有第二转动块,第二转动块底部通过第二转动结构转动连接有电磁铁。
6.更进一步地,所述固定底板顶部贯穿开设有固定孔,通过穿过固定孔的螺栓将本设备安装于无人机的顶部。
7.更进一步地,所述第一支撑柱前后贯穿开设有第一转动孔,所述支撑结构包括第二支撑柱,第二支撑柱固定连接于所述固定底板顶部,第二支撑柱后侧顶部固定连接有第三支撑柱,第三支撑柱前侧顶部固定连接有第四支撑柱,第四支撑柱前后贯穿开设有第二转动孔。
8.更进一步地,所述第一转动结构包括第一电机,第一电机固定连接于所述第一支撑柱正面,第一电机输出端固定连接有第一转动轴,第一转动轴贯穿于所述第一转动孔和第二转动孔,并与二者转动连接,第一转动轴外壁固定连接有转动限位块。
9.更进一步地,所述第一转动块前后贯穿开设有穿孔,所述第一转动轴贯穿于穿孔,穿孔内壁开设有限位槽,所述转动限位块与限位槽相适配。
10.更进一步地,所述第二转动结构包括第二电机,第二电机固定连接于所述第二转
动块背面,第二电机位置与所述支撑结构相适配,第二电机输出端固定连接有第二转动轴,第二转动块前后贯穿开设有第三转动孔,第三转动孔与第二转动轴转动连接,第二转动轴外壁固定连接有第三转动块,第三转动块底部固定连接有固定块,所述电磁铁固定连接于固定块底部。
11.与现有技术相比,本实用新型的有益效果是:
12.该无人机高空施工作业检测的机械手,通过第一转动结构、电动推杆、第二转动结构和电磁铁的设置,当无人机在铁塔外壁进行施工作业检测时,第一转动结构和第二转动结构转动,电动推杆伸长,使得电磁铁吸附于塔壁上,此时无人机可以降低转速或临时关闭以节约电能,使得其检测时间更长,检测效率更高。
附图说明
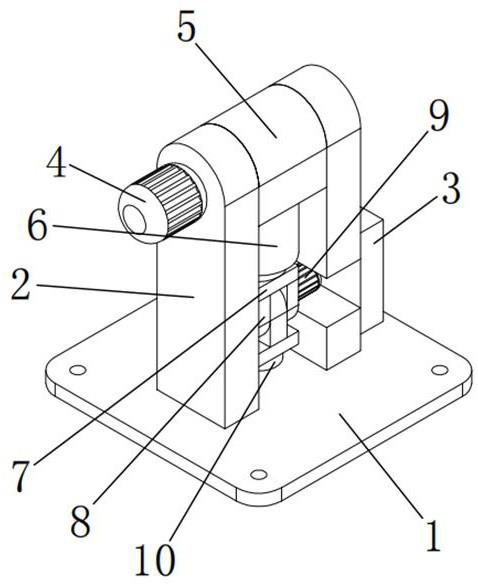
13.图1为本实用新型的正面顶部轴测结构示意图;
14.图2为本实用新型的背面底部轴测结构示意图;
15.图3为本实用新型的支撑结构结构示意图;
16.图4为本实用新型的第一转动结构示意图;
17.图5为本实用新型的电动推杆结构示意图;
18.图6为本实用新型的第二转动结构示意图。
19.图中:1、固定底板;101、固定孔;2、第一支撑柱;201、第一转动孔;3、支撑结构;301、第二支撑柱;302、第三支撑柱;303、第四支撑柱;304、第二转动孔;4、第一转动结构;401、第一电机;402、第一转动轴;403、转动限位块;5、第一转动块;501、穿孔;502、限位槽;6、电动推杆;7、连接块;8、第二转动块;801、第三转动孔;9、第二转动结构;901、第二电机;902、第二转动轴;903、第三转动块;904、固定块;10、电磁铁。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
22.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
23.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
24.如图1-6所示,本实用新型提供一种技术方案:一种无人机高空施工作业检测的机
械手,包括固定底板1,固定底板1顶部贯穿开设有固定孔101,通过穿过固定孔101的螺栓将本设备安装于无人机的顶部,固定底板1顶部固定连接有第一支撑柱2和支撑结构3,第一支撑柱2和支撑结构3顶部通过第一转动结构4转动连接有第一转动块5,第一转动块5前后贯穿开设有穿孔501,穿孔501内壁开设有限位槽502,第一转动块5底部固定连接有电动推杆6,电动推杆6底部固定连接有连接块7,连接块7底部固定连接有第二转动块8,第二转动块8底部通过第二转动结构9转动连接有电磁铁10,需要说明的是,使用无人机进行高空施工作业检测时,先将无人机飞到对应高度,然后启动第一转动结构4将第一转动块5、电动推杆6、连接块7、第二转动块8、第二转动结构9和电磁铁10转动出来,然后伸长电动推杆6,最后转动第二转动结构9,使得电磁铁10能够贴合于铁塔外壁,电磁铁10通电后对塔壁进行吸附,之后即可降低无人机的转速。
25.作为一种具体的实施例,第一支撑柱2前后贯穿开设有第一转动孔201,支撑结构3包括第二支撑柱301,第二支撑柱301固定连接于固定底板1顶部,第二支撑柱301后侧顶部固定连接有第三支撑柱302,第三支撑柱302前侧顶部固定连接有第四支撑柱303,第四支撑柱303前后贯穿开设有第二转动孔304,需要说明的是,通过第二支撑柱301、第三支撑柱302和第四支撑柱303的设置,第二支撑柱301和第四支撑柱303呈现出一端凹槽,这样在第一转动结构4进行转动时,第二转动结构9就不会与之相碰撞。
26.作为一种具体的实施例,第一转动结构4包括第一电机401,第一电机401固定连接于第一支撑柱2正面,第一电机401输出端固定连接有第一转动轴402,第一转动轴402贯穿于穿孔501,第一转动轴402贯穿于第一转动孔201和第二转动孔304,并与二者转动连接,第一转动轴402外壁固定连接有转动限位块403,转动限位块403与限位槽502相适配,需要说明的是,第一电机401的转动带动第一转动轴402转动,第一转动轴402通过转动限位块403和限位槽502的适配带动第一转动块5转动,从而通过电动推杆6、连接块7和第二转动块8带动第二转动结构9和电磁铁10进行转动。
27.作为一种具体的实施例,第二转动结构9包括第二电机901,第二电机901固定连接于第二转动块8背面,第二电机901位置与支撑结构3相适配,第二电机901输出端固定连接有第二转动轴902,第二转动块8前后贯穿开设有第三转动孔801,第三转动孔801与第二转动轴902转动连接,第二转动轴902外壁固定连接有第三转动块903,第三转动块903底部固定连接有固定块904,电磁铁10固定连接于固定块904底部,需要说明的是,第二电机901的转动能够带动第二转动轴902转动,而第二转动轴902能够带动第三转动块903进行转动,第三转动块903能够带动固定块904进行转动,固定块904带动电磁铁10进行转动,以改变电磁铁10的角度,使其贴合于铁塔外壁。
28.需要说明的是,通过第一转动结构4、电动推杆6、第二转动结构9和电磁铁10的设置,当无人机在铁塔外壁进行施工作业检测时,第一转动结构4和第二转动结构9转动,电动推杆6伸长,使得电磁铁10吸附于塔壁上,此时无人机可以降低转速或临时关闭以节约电能,使得其检测时间更长,检测效率更高。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1