一种机器人手腕构造及机器人的制作方法
1.本实用新型属于工业机器人技术领域,尤其涉及一种机器人手腕构造及机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,工业机器人在自动化生产过程中,由基座以及多个关节组成,关节的摇摆程度相较于基座来说要小很多,基座承载整个手腕构造的大角度旋转任务,其保养维护相较于关节部位来说要更加频繁,现有的保养方式需将基座整体拆除,随后在活动的轴承位置涂抹润滑油,会损失手腕构造的工作时间,并且由于基座的组成零件多,拆装过程也极具复杂,保养周期长。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中基座承载整个手腕构造的大角度旋转任务,其保养维护相较于关节部位来说要更加频繁,现有的保养方式需将基座整体拆除,随后在活动的轴承位置涂抹润滑油,会损失手腕构造的工作时间,并且由于基座的组成零件多,拆装过程也极具复杂,保养周期长的问题,而提出的一种机器人手腕构造及机器人。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种机器人手腕构造及机器人,包括移动台、基座,所述移动台的上表面固定有基座,所述基座的上方设有相互转动连接的主力臂、摇摆臂;
6.所述基座包括固定座、旋转座,所述旋转座转动安装在固定座的上表面,所述固定座固定于移动台的上表面居中处,所述固定座的内部居中部固定安装有驱动电机,所述驱动电机与旋转座连接的传动轴外部固定有旋转盘,所述旋转盘的外壁上固定连接有摇摆杆;
7.所述固定座的内壁上沿口处固定有内撑环,所述旋转座的底端面对应内撑环处凸出固定有连接环,所述内撑环的上表面开设有供连接环嵌入的孔,所述内撑环的内壁上对应摇摆杆处开设有供摇摆杆伸入滑动的滑槽,所述内撑环的内部固定安装有内块,所述内块的内部设有吸收棉,所述内块的上表面与连接环的底端面对应。
8.得益于旋转座底部的连接环与固定座上沿口处的内撑环配合,使得基座在旋转作业时,具有自动润滑的效果。
9.优选的,所述固定座的外壁上开设有灌注孔,所述灌注孔处安装有密封头。
10.得益于灌注孔的设置便于对润滑剂进行添加。
11.优选的,所述内块远离摇摆杆的一端连通有导管,所述导管与灌注孔连通。
12.得益于导管的设置使得润滑剂可穿过灌注孔进入内块内部,方便润滑剂的精准添加。
13.优选的,所述内块与连接环同圆心分布,所述内块为圆环结构,且内块朝向摇摆杆的一端还设有与滑槽对应的移动槽,所述摇摆杆穿过内撑环、内块的一端固定有与吸收棉
接触的挤压块。
14.得益于吸收棉的设置可将润滑剂进行率先储存,在基座旋转工作时同步挤出。
15.优选的,所述连接环的底端面安装有多组滚珠,所述滚珠与内块的上表面接触。
16.得益于滚珠与内块的接触,使得内块内部的润滑剂被挤出时可以快速接触滚珠,使得滚珠的滑动效果更好。
17.优选的,所述内块的上表面对应滚珠处开设有多组通孔。
18.得益于通孔的设置,内块内部储存的润滑剂在旋转座旋转时同步被挤出与滚珠接触,使得滚珠具有润滑的效果。
19.一种机器人,机器人具备手腕构造。
20.综上所述,本实用新型的技术效果和优点:该机器人手腕构造及机器人,通过旋转座与固定座的转动配合使得机器人手腕具有大幅度转动的效果,并且通过旋转座底部的连接环与固定座上沿口处的内撑环配合,使得基座在旋转作业时,具有自动润滑的效果,进而无需对基座进行拆除上油,保证基座的工作流畅度,提升基座的工作质量,也避免停机拆装基座的工序,使得机器人手腕构造的工作效率更高。
附图说明
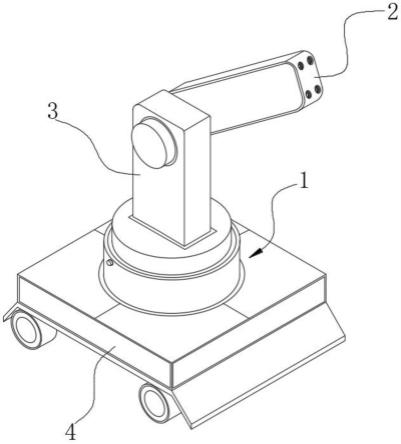
21.图1为本实用新型结构示意图;
22.图2为基座展开状态结构示意图;
23.图3为固定座主视图;
24.图4为图3中a处放大结构示意图。
25.图中:1、基座;2、摇摆臂;3、主力臂;4、移动台;101、旋转座;102、内撑环;103、摇摆杆;104、旋转盘;105、连接环;106、密封头;107、灌注孔;108、驱动电机;109、固定座;110、内块;111、挤压块;112、通孔;114、吸收棉;115、导管;116、滚珠。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.参照图1,一种机器人手腕构造及机器人,包括移动台4、基座1,移动台4的上表面固定有基座1,基座1的上方设有相互转动连接的主力臂3、摇摆臂2。
28.参照图2,基座1包括固定座109、旋转座101,旋转座101转动安装在固定座109的上表面,固定座109固定于移动台4的上表面居中处,固定座109的内部居中部固定安装有驱动电机108,驱动电机108与旋转座101连接的传动轴外部固定有旋转盘104,旋转盘104的外壁上固定连接有摇摆杆103。旋转盘104带动摇摆杆103同步转动。
29.参照图3、图4,固定座109的内壁上沿口处固定有内撑环102,旋转座101的底端面对应内撑环102处凸出固定有连接环105,内撑环102的上表面开设有供连接环105嵌入的孔,内撑环102的内壁上对应摇摆杆103处开设有供摇摆杆103伸入滑动的滑槽,内撑环102的内部固定安装有内块110,内块110的内部设有吸收棉114,内块110的上表面与连接环105的底端面对应。固定座109的外壁上开设有灌注孔107,灌注孔107处安装有密封头106。密封
头106螺纹连接灌注孔107,内块110远离摇摆杆103的一端连通有导管115,导管115与灌注孔107连通。内块110与连接环105同圆心分布,内块110为圆环结构,且内块110朝向摇摆杆103的一端还设有与滑槽对应的移动槽,摇摆杆103穿过内撑环102、内块110的一端固定有与吸收棉114接触的挤压块111。连接环105的底端面安装有多组滚珠116,滚珠116与内块110的上表面接触。通过滚珠116提升旋转座101与固定座109的连接流畅度,内块110的上表面对应滚珠116处开设有多组通孔112。润滑剂穿过通孔112接触滚珠116,进而旋转座101与固定座109之间的转动连接质量更高。
30.一种机器人,机器人具备手腕构造。
31.工作原理:在使用时,通过基座1的转动使得主力臂3与摇摆臂2具有旋转的动力,主力臂3将基座1的旋转力传出,而摇摆臂2的作用是根据作业需求带动头部的工件小幅度摆动,在基座1的旋转作业过程中,可同时进行自动润滑,润滑方式为;
32.首先在灌注孔107内加注润滑剂,润滑剂流过导管115进入吸收棉114内部,灌注孔107在固定座109的外壁开设有多组,多方向加注完成后将密封头106固定在灌注孔107内,当驱动电机108转动带动旋转座101转动时,位于旋转座101底部的连接环105在固定座109沿口处的内撑环102内部转动,而固定在驱动电机108与旋转座101之间传动轴上的旋转盘104随之转动,旋转盘104转动时通过摇摆杆103带动挤压块111转动,挤压块111在内块110的内部转动后,对吸收棉114形成挤压,使得吸收棉114内部的润滑剂被挤出,润滑剂穿过通孔112接触滚珠116,进而旋转座101与固定座109之间的转动连接质量更高,由于密封头106的设置,灌注孔107被封闭,润滑剂无法流出,达到基座1一遍旋转作业一遍自动润滑的效果。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1