一种码垛机的码垛机械手的制作方法
1.本实用新型涉及机械手技术领域,特别涉及一种码垛机的码垛机械手。
背景技术:
2.码垛机是将已装入容器的纸箱,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存,本设备采用plc+触摸屏控制,实现智能化操作管理,简便、易掌握,可大大地减少劳动力和降低劳动强度。
3.但是其在实际使用时,机械手一般定位在一个地方,进行原地360度旋转,小距离驱动机械臂使爪手抓取码垛料件,距离较远时,需要工作员将较远的货物搬运到机械手附近,不能满足对远距离不同的地方进行爪手抓取码垛料的功能,降低了机械手的使用性能,增加了工作员的劳动力。
技术实现要素:
4.本实用新型针对以上问题,提出一种码垛机的码垛机械手来解决上述机械手不能满足对远距离不同的地方进行爪手抓取码垛料的功能,降低了机械手的使用性能的问题。
5.本实用新型是这样实现的,一种码垛机的码垛机械手,包括操作控制面板、机械手本体和驱动架,所述机械手本体包括固定底座,所述固定底座通过螺栓固定安装在安装座的上端,所述固定底座的上方设置有旋转底座,所述旋转底座上方的后端通过轴杆活动连接有连接臂,所述连接臂另一端的上方设置有升降电缸,所述升降电缸的外侧壁固定连接有连接座,且连接座通过轴杆与连接臂活动连接,所述升降电缸的输出端固定连接有驱动臂,所述驱动臂另一端的内部部通过轴杆活动连接有取料架本体;
6.所述驱动架从下至上依次包括横滑动架、纵滑动架和安装座,所述横滑动架内部的左右两侧均活动连接有横丝杠,所述纵滑动架的下端固定连接有与横丝杠外侧壁螺纹连接的横驱动块,所述纵滑动架内部的前后两侧活动连接有纵丝杠,所述安装座的下端固定连接有与纵丝杠外侧壁螺纹连接的纵驱动块。
7.为了方便调整取料爪手的角度,作为本实用新型的一种码垛机的码垛机械手优选的,所述取料架本体包括爪手机座,所述爪手机座的内部安装有转动电机,所述转动电机的输出端固定连接有固定套,所述固定套的内部固定连接有微调电缸,所述微调电缸的输出端固定连接有取料爪手。
8.为了便于调整连接臂和取料架本体的方向,作为本实用新型的一种码垛机的码垛机械手优选的,所述固定底座的内部固定连接有旋转电机,所述旋转电机的输出端与旋转底座的下端固定连接。
9.为了提高纵滑动架滑动的稳定性能,作为本实用新型的一种码垛机的码垛机械手优选的,所述横丝杠下方的前后两侧均设置有与横滑动架左右两侧固定连接的横滑轨,所述纵滑动架下端的前后两侧均固定连接有与横滑轨相匹配的横滑块。
10.为了提高壳安装座滑动的稳定性能,作为本实用新型的一种码垛机的码垛机械手
优选的,所述纵丝杠的左右两侧均设置有与纵滑动架内部前后两侧均固定连接纵滑轨,所述安装座下端的左右两侧均固定连接有与纵滑轨相匹配的纵滑块。
11.为了使安装座实现左右与前后移动的目的,作为本实用新型的一种码垛机的码垛机械手优选的,所述横滑动架的右侧固定连接有与横丝杠右端固定连接的横正反转电机,所述纵滑动架的前端面固定连接有纵丝杠前端固定连接的纵正反转电机。
12.与现有技术相比,本实用新型的有益效果是:
13.该种码垛机的码垛机械手,启动横正反转电机,横丝杠进行旋转,使纵滑动架实现左右移动效果,进而使机械手本体实现左右调整目的,启动纵正反转电机,纵丝杠进行旋转,安装座进行前后移动,使机械手本体实现前后移动的目的,便于机械手本体对较远的货物进行爪手抓取码垛,启动固定底座内部的旋转电机,使旋转底座实现旋转的效果,方便调整连接臂和取料架本体的方向,使机械手本体可以多方位进行移动抓取货物,增强了机械手的使用性能,降低了工作员的劳动力。
附图说明
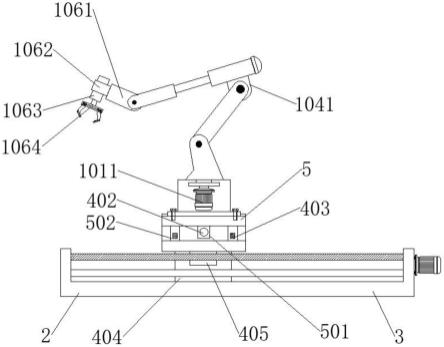
14.图1为本实用新型一种码垛机的码垛机械手的整体结构图;
15.图2为本实用新型纵滑动架剖视的结构图。
16.图中,1、机械手本体;101、固定底座;1011、旋转电机;102、旋转底座;103、连接臂;104、升降电缸;1041、连接座;105、驱动臂;106、取料架本体;1061、爪手机座;1062、固定套;1063、微调电缸;1064、取料爪手;2、驱动架;3、横滑动架;301、横正反转电机;302、横丝杠;303、横滑轨;4、纵滑动架;401、纵正反转电机;402、纵丝杠;403、纵滑轨;404、横驱动块;405、横滑块;5、安装座;501、纵驱动块;502、纵滑块。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
19.请参阅图1-2,一种码垛机的码垛机械手,包括操作控制面板、机械手本体1和驱动架2,机械手本体1包括固定底座101,固定底座101通过螺栓固定安装在安装座5的上端,固定底座101的上方设置有旋转底座102,旋转底座102上方的后端通过轴杆活动连接有连接臂103,连接臂103另一端的上方设置有升降电缸104,升降电缸104的外侧壁固定连接有连接座1041,且连接座1041通过轴杆与连接臂103活动连接,升降电缸104的输出端固定连接有驱动臂105,驱动臂105另一端的内部部通过轴杆活动连接有取料架本体106;
20.驱动架2从下至上依次包括横滑动架3、纵滑动架4和安装座5,横滑动架3内部的左
右两侧均活动连接有横丝杠302,纵滑动架4的下端固定连接有与横丝杠302外侧壁螺纹连接的横驱动块404,纵滑动架4内部的前后两侧活动连接有纵丝杠402,安装座5的下端固定连接有与纵丝杠402外侧壁螺纹连接的纵驱动块501。
21.本实施例中:连接臂103通过轴杆与旋转底座102的另一端活动连接(轴杆与微型伺服电机的输出端固定连接,内部所用到的电机全部采用伺服电机),升降电缸104通过连接座1041与连接臂103活动连接,进而调整旋转底座102、连接臂103及升降电缸104之间的角度与位置,启动升降电缸104,便于调整驱动臂105与升降电缸104的距离,便于取料架本体106爪手抓取较远距离的货物,且旋转底座102活动安装在固定底座101的上方,启动固定底座101内部的旋转电机1011,使旋转底座102实现旋转的效果,方便调整连接臂103和取料架本体106的方向,纵滑动架4下端的横驱动块404与横丝杠302的外侧壁螺纹连接,且安装座5下端纵驱动块501与纵丝杠402的外侧壁螺纹连接,机械手本体1通过固定底座101固定安装在安装座5的上端,横丝杠302进行旋转,纵滑动架4进行左右移动,进而使机械手本体1实现左右移动的目的,纵丝杠402进行旋转,安装座5进行前后移动,使机械手本体1实现前后移动的目的,使机械手本体1可以多方位进行移动抓取货物,使机械手本体1可以对较远的货物进行爪手抓取码垛,增强了机械手的使用性能,降低了工作员的劳动力。
22.作为本实用新型的一种技术优化方案,取料架本体106包括爪手机座1061,爪手机座1061的内部安装有转动电机,转动电机的输出端固定连接有固定套1062,固定套1062的内部固定连接有微调电缸1063,微调电缸1063的输出端固定连接有取料爪手1064。
23.本实施例中:启动爪手机座1061内部的转动电机,使固定套1062实现旋转的效果,进一步方便调整取料爪手1064的角度,启动微调电缸1063,便于调整取料爪手1064的长度,便于爪手抓取码垛料。
24.作为本实用新型的一种技术优化方案,固定底座101的内部固定连接有旋转电机1011,旋转电机1011的输出端与旋转底座102的下端固定连接。
25.本实施例中:启动旋转电机1011,使旋转底座102实现旋转的效果,进一步便于调整连接臂103和取料架本体106的方向。
26.作为本实用新型的一种技术优化方案,横丝杠302下方的前后两侧均设置有与横滑动架3左右两侧固定连接的横滑轨303,纵滑动架4下端的前后两侧均固定连接有与横滑轨303相匹配的横滑块405。
27.本实施例中:横滑块405与横滑轨303滑动连接,进一步提高纵滑动架4滑动的稳定性能。
28.作为本实用新型的一种技术优化方案,纵丝杠402的左右两侧均设置有与纵滑动架4内部前后两侧均固定连接纵滑轨403,安装座5下端的左右两侧均固定连接有与纵滑轨403相匹配的纵滑块502。
29.本实施例中:纵滑块502与纵滑轨403滑动连接,进一步提高壳安装座5滑动的稳定性能。
30.作为本实用新型的一种技术优化方案,横滑动架3的右侧固定连接有与横丝杠302右端固定连接的横正反转电机301,纵滑动架4的前端面固定连接有纵丝杠402前端固定连接的纵正反转电机401。
31.本实施例中:启动横正反转电机301和纵正反转电机401,进而使安装座5实现左右
与前后移动的目的,便于机械手爪手抓取较远距离的码垛料件。
32.本实用新型的工作原理及使用流程:首先,纵滑动架4下端的横驱动块404与横丝杠302的外侧壁螺纹连接,且安装座5下端纵驱动块501与纵丝杠402的外侧壁螺纹连接,机械手本体1通过固定底座101固定安装在安装座5的上端,启动横正反转电机301,横丝杠302进行旋转,使纵滑动架4实现左右移动效果,进而使机械手本体1实现左右调整目的,启动纵正反转电机401,纵丝杠402进行旋转,安装座5进行前后移动,使机械手本体1实现前后移动的目的,便于机械手本体1对较远的货物进行爪手抓取码垛,启动固定底座101内部的旋转电机1011,使旋转底座102实现旋转的效果,方便调整连接臂103和取料架本体106的方向,使机械手本体1可以多方位进行移动抓取货物,增强了机械手的使用性能,降低了工作员的劳动力。
33.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1