一种仿生尺蠖电缆巡检机器人的制作方法
1.本实用新型涉及电缆检测装置领域,具体涉及的是一种仿生尺蠖电缆巡检机器人。
背景技术:
2.随着我国城市化进程不断推进,各行各业对电力需求量日益增大,这在某种程度上,提高了我国架空输电线路的维护工作难度和工作量。在架空输电线路检修方面,绝大部分地区仍然采用比较传统的人工巡检方式,随着架空输电线路大幅度增加,巡检工作人员的工作量也随之大幅度增加,其日常巡检工作质量也就无法保证;同时由于高压电线电压过高,对人和动物造成一定威胁,为了防止触电事故,高压电线往往离地面有一定距离,这也是导致高压电线巡检困难的因素之一。
3.传统人工巡线需要人工到达现场,但很多时候没有公路,需要翻山越岭、风餐露宿,而且即使到达塔下,一般铁塔三五十米高,像特高压塔上百米高,通常还会有遮挡,人在地面很难看清楚,所以有的时候需要爬塔走线去巡查缺陷,但因为某些时刻需要带电作业,所以巡检过程十分危险。
4.无人机在电力巡检领域中的具体应用主要为精细巡检、定点巡检、范围巡检及其他巡检,一般精细巡检需要全面细致地搜集数据和检查,单次巡检速度较慢,定点巡检速度适中,而范围巡检速度较快;假设平均而言,无人机电力巡检速度为每小时20千米。根据调研电力巡检工作人员了解到,巡检线路基本是以月为单位,一般各级别线路每月安排一次常规巡检,如果线路属于保电线路或者特殊巡视维护线路就要按相关规定增加巡视的次数,除了日常巡视检查,还有遇故障需要排查的临时巡检,用电高峰期的特殊巡检等,据此估算,电力线路每年巡检次数在24次左右。但是目前市面上大多数无人机都存在航时短的问题,也是目前无人机电力巡检不能完全普及最根本的原因。
技术实现要素:
5.本实用新型要解决的技术问题是针对以上问题和要求,提供一种仿生尺蠖电缆巡检机器人。
6.为解决以上技术问题,本实用新型采用以下技术方案:
7.一种仿生尺蠖电缆巡检机器人,包括多关节机构、抱紧机构、检测机构和电源,所述多关节机构两端设置有抱紧机构,所述多关节机构包括顺次相连的多个连接结构,所有连接结构的轴线位于同一直线上,所述连接结构两端通过转动机构与相邻的抱紧机构或相邻的连接结构铰接,所述转动机构用于通过带动连接结构转动改变相邻两个连接结构或连接结构与相邻抱紧机构的夹角,所述抱紧机构包括两个卡爪,两个卡爪连接抱紧驱动机构,所述抱紧驱动机构用于驱动两个卡爪在竖直平面内转动进而相互靠近或远离,所述卡爪的转动方向与多关节机构的轴线垂直,所述检测机构设置在多关节机构上,所述检测机构包括无线收发装置和摄像头,所述摄像头的数据线与无线收发装置连接,所述电源与抱紧驱
动机构、摄像头和所有转动机构的电源输入端连接。
8.进一步的,所述多关节机构两端下表面设置有无动力滚轮,所述无动力滚轮的转轴两端通过轴承设置在多关节机构上且转轴与多关节机构的轴线垂直。
9.进一步的,所述卡爪为v形板且左右两侧边上均设置有两个侧翼滚轴,每个侧翼滚轴的轴线所在的竖直平面均与多关节机构的轴线垂直,位于上端的侧翼滚轴分别与一个侧翼驱动电机连接,所述侧翼驱动电机用于驱动相连的翼滚轴转动,所述电源与所有侧翼驱动电机的电源输入端连接。
10.进一步的,所述转动机构为舵机。
11.进一步的,所述抱紧驱动机构包括主动齿轮、从动齿轮和抱紧驱动舵机,所述主动齿轮和从动齿轮相互啮合且分别固定在两个卡爪上,所述主动齿轮和从动齿轮的转轴与多关节机构的轴线平行,所述抱紧驱动舵机与主动齿轮连接且用于驱动主动齿轮绕转轴转动进而带动两个卡爪同时转动,所述电源与抱紧驱动舵机的电源输入端连接。
12.进一步的,所述多关节机构包括顺次相连的第一连接结构、第二连接结构和第三连接结构,所述第一连接结构的长度大于第二连接结构和第三连接结构的长度。
13.本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
14.当正常巡线,没有障碍物时,本实用新型的两端抱紧机构均抱紧电线,通过侧翼滚轴转动带动机器人可快速移动,本实用新型的仿生尺蠖机器人的两端抱紧机构采用环抱式设计,能高度保证用于巡线检修的机器人按照预定轨迹巡线、不脱离高压电缆掉落;中间多关节机构采用了多关节结构,借此结构模仿尺蠖的运动特点,来完成越障或是巡线,这种类连接结构的多关节结构为仿生尺蠖机器人提供了滚动前进巡线以外的另一种运动模式——跨越式前进。跨越式前进同时可用于仿生尺蠖机器人的越障,且对障碍物的形态有较大包容性,因此本实用新型能在高空高压输电线上行进完成监测任务,每个卡爪上设有四个侧翼滚轴,每个抱紧机构上有八个侧翼滚轴,每个抱紧机构由一个抱紧驱动舵机控制闭合抱紧和外张松开,相邻两个侧翼滚轴的夹角约为98
°
,每个侧翼滚轴与高压线横截面圆相切,抱紧机构环抱住高压电线时,抱紧机构上面的侧翼滚轴在侧翼驱动电机下转动,让巡线机器人稳固地在高压电线上前进工作,不至于因为自身重量或者高压电线晃动脱离高压电线。两个无动力轮位于高压电线的正上方,无动力轮的弧形凹槽设计,增大了其与高压电线的接触面,无动力滚轮用于支撑机器人主体,并对机器人主体起到一定的固定作用,一定程度上防止机器人左右偏移,并减少机器人在前进后退中的阻力。
15.下面结合附图和实施例对本实用新型进行详细说明。
附图说明
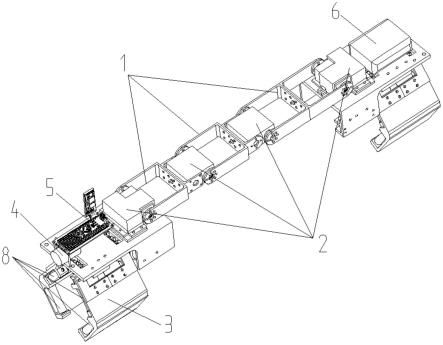
16.图1为本实用新型总体结构示意图;
17.图2为本实用新型仰视结构示意图;
18.图3为抱紧机构结构示意图。
19.1、连接结构;2、转动机构;3、卡爪;4、摄像头;5、无线收发装置;6、电源;7、无动力滚轮;8、侧翼滚轴;9、主动齿轮;10、从动齿轮
具体实施方式
20.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
21.如图1-3所示,一种仿生尺蠖电缆巡检机器人,包括多关节机构、抱紧机构、检测机构和电源6,所述多关节机构两端设置有抱紧机构,所述多关节机构包括顺次相连的多个连接结构1,所有连接结构1的轴线位于同一直线上,所述连接结构1两端通过转动机构2与相邻的抱紧机构或相邻的连接结构1铰接,所述转动机构2用于通过带动连接结构转动改变相邻两个连接结构1或连接结构1与相邻抱紧机构的夹角,所述抱紧机构包括两个卡爪3,两个卡爪3连接抱紧驱动机构,所述抱紧驱动机构用于驱动两个卡爪3在竖直平面内转动进而相互靠近或远离,所述卡爪3的转动方向与多关节机构的轴线垂直,所述检测机构设置在多关节机构上,所述检测机构包括无线收发装置5和摄像头4,所述摄像头4的数据线与无线收发装置5连接,所述电源6与抱紧驱动机构、摄像头4和所有转动机构2的电源输入端连接。
22.作为一种实施方式,所述多关节机构两端下表面设置有无动力滚轮7,所述无动力滚轮7的转轴两端通过轴承设置在多关节机构上且转轴与多关节机构的轴线垂直。
23.作为一种实施方式,所述卡爪3为v形板且左右两侧边上均设置有两个侧翼滚轴8,每个侧翼滚轴8的轴线所在的竖直平面均与多关节机构的轴线垂直,位于上端的侧翼滚轴8分别与一个侧翼驱动电机连接,所述侧翼驱动电机用于驱动相连的翼滚轴8转动,所述电源6与所有侧翼驱动电机的电源输入端连接。
24.作为一种实施方式,所述转动机构2为舵机。
25.作为一种实施方式,所述抱紧驱动机构包括主动齿轮9、从动齿轮10和抱紧驱动舵机,所述主动齿轮9和从动齿轮10相互啮合且分别固定在两个卡爪3上,所述主动齿轮9和从动齿轮10的转轴与多关节机构的轴线平行,所述抱紧驱动舵机与主动齿轮9连接且用于驱动主动齿轮9绕转轴转动进而带动两个卡爪3同时转动,所述电源6与抱紧驱动舵机的电源输入端连接。
26.作为一种实施方式,所述多关节机构包括顺次相连的第一连接结构、第二连接结构和第三连接结构,所述第一连接结构的长度大于第二连接结构和第三连接结构的长度。
27.本实施例中,无线收发装置为艾莫迅rs232/485/422-lora无线收发模块,电源可采用充电电池和/或太阳能电池。摄像头用于拍摄电缆图像,通过无线收发装置可将摄像头采集的电缆图像发送到地面主机。
28.本实用新型参考了尺蠖的运动特点,利用这一特点来完成本实用新型在高压电线的前行和越障。为了完成尺蠖运动特点的仿生,本实用新型在2个无动力轮之间设计了类似连接结构的多关节结构,用于连接一号连接结构和二号连接结构。该结构是由4个舵机控制的4自由度关节型多关节机构构成。
29.当正常巡线,没有障碍物时,巡线机器人的两端抱紧机构均抱紧电线,通过侧翼滚轴转动可带动机器人快速移动,当巡线机器人在前进过程中遇到需要跨越的障碍物时,本实用新型用多关节机构结构部分来模仿尺蠖的运动,首先前面一号抱紧机构外张松开高压电线,多关节机构前部抬起,后面二号抱紧机构仍然处于闭合抱紧状态,环抱高压电线,且后面二号抱紧机构在侧翼滚轴的带动下继续前进,直至抬起的前面一号抱紧机构完全越过障碍物,则放下一号抱紧机构,让前面一号抱紧机构恢复为闭合抱紧高压电线的状态,至此
巡线机器人的一号抱紧机构完成越障。巡线机器人二号抱紧机构的越障与一号抱紧机构的越障同理,此时需要后面二号抱紧机构外张松开高压电线,多关节机构抬起二号抱紧机构,同时前面一号抱紧机构继续在舵机的驱动下闭合抱紧高压电线,且前面一号抱紧机构在侧翼滚轴的带动下继续前进,直至抬起的巡线机器人二号抱紧机构完全越过障碍物,则放下多关节机构抬起的巡线机器人的二号抱紧机构,让二号抱紧机构在舵机的控制下恢复为闭合抱紧高压电线的状态,完成这一过程则巡线机器人的整个越障完成。
30.以上所述为本实用新型最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本实用新型的保护范围以权利要求的内容为准,任何基于本实用新型的技术启示而进行的等效变换,也在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1