一种液压机械手的回转机构的制作方法
1.本实用新型涉及机械技术领域,具体为一种液压机械手的回转机构。
背景技术:
2.铝锭是电解铝厂的一种主要产品,浇铸后的铝锭需要堆垛打捆以利运输,所以就有了铝锭堆垛,而铝锭堆垛一般是将铝锭从冷却槽里面提起,然后通过导轨和驱动机械装置将铝锭排列整齐的放置在工作台上,抓取装置将排好的铝锭根据堆垛中的层次、要求,在堆垛前旋转90
°
,然后铝锭再被放下,而为了方便铝锭堆垛,我们通过对铝锭堆垛机械手的创新进行改进,从而来提高使用效率,使之发挥出最大的价值。
3.经检索(申请号:cn202020169761.0),可得知,一种铝锭堆垛机械手的回转机构,包括底座、回转电机、转轴、主体柱、螺销、第一液压杆、大臂、连接块、连接座、机械手、弹性防滑块和定轴帽,所述底座上方设置有主体柱,所述底座内部安装有回转电机,所述第一液压杆一侧安装有大臂,所述大臂与所述小臂通过定轴连接,所述定轴上设置有定轴帽。
4.在实现本实用新型过程中,发明人发现现有技术中存在如下问题没有得到解决:该装置虽然具备良好的回转功能,可将物料吊运,但是在液压机械手的回转机构使用过程中,并不具备相应的转动位置辅助判断功能,多为工作人员凭借工作经验进行启停正反电机,该方式存在一定偏差,需物料旁的工作人员指挥操控人员进行正反微度调节,直至机械手与待吊运物料对位,每次回转调节至终点或起点时,需多次微调机械手的点位,间接影响点位调节效率,亟需进行改进,因此,我们提出一种液压机械手的回转机构。
技术实现要素:
5.本实用新型的目的在于提供一种液压机械手的回转机构,解决了背景技术中所提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种液压机械手的回转机构,包括底座,所述底座顶部固定安装有正反电机,所述正反电机的传动轴顶部传动连接有撑台,所述撑台顶部固定安装有套筒,且套筒内固定安装有横臂,所述横臂底部一侧固定安装有推杆电机,所述推杆电机的传动轴底部传动连接有机械手,且机械手内两侧底部均固定安装有弹性防滑块;所述撑台一侧底部固定安装有凸条,所述撑台前壁底部固定安装有处理器和指示灯,且撑台靠近指示灯的下侧固定安装有电控器,且电控器的信号输出端分别与正反电机和推杆电机的信号输入端连接;所述底座顶部靠近正反电机的外侧放置有环形滑轨,所述环形滑轨内活动安装有滑块,且滑块共有两组,两组所述滑块顶部均固定安装有测距传感器;所述测距传感器的数据输出端与处理器的数据输入端连接,所述处理器的信号输出端与指示灯的信号输入端连接。
7.作为本技术技术方案的一可选方案,所述环形滑轨两侧均固定安装有延伸架,且延伸架共有四组,所述延伸架延伸至底座外侧,所述延伸架底端固定安装有支块;所述滑块下端面中部开设有凹槽,所述凹槽内插接有活动杆,所述活动杆底端固定安装有限位板,且
限位板下表面固定安装有防滑垫,所述活动杆靠近限位板的上侧套设有弹簧;所述环形滑轨内靠近滑道的下侧连通开设有凹台,且限位板抵触在凹台内。
8.作为本技术技术方案的一可选方案,所述套筒前壁两侧均贯穿有螺栓,所述横臂前壁一侧开设有若干组均匀阵列的螺孔,且螺栓通过螺纹与同侧的螺孔旋接。
9.作为本技术技术方案的一可选方案,所述底座两侧均固定安装有耳板,且耳板内中部开设有定位孔。
10.作为本技术技术方案的一可选方案,所述延伸架的转角处和推杆电机的传动轴与机械手连接处两侧均固定安装有加强筋,且加强筋为三角形结构。
11.与现有技术相比,本实用新型的有益效果如下:
12.1.本实用新型一种液压机械手的回转机构,通过设置有指示灯和凸条,每当回转调节到位时,可通过测距传感器检测间距,当间距处于设定阈值,即为凸条位于测距传感器上侧,则撑台和机械手转动到设定起点或终点点位,指示灯亮起,工作人员在操控电控器过程中,可依据指示灯是否亮起准确判断转动是否到位,可规避多次调整角度问题,间接提升机械手点位调节效率。
13.2.本实用新型一种液压机械手的回转机构,通过设置有延伸架和限位板,由于环形滑轨架空在底座上,且四组延伸架均远离底座设置,非接触设计可规避机械共振导致滑块自动移位,同时弹簧给予限位板作用力,起到滑块限位效果,进一步提升滑块临时限位的稳定程度。
附图说明
14.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
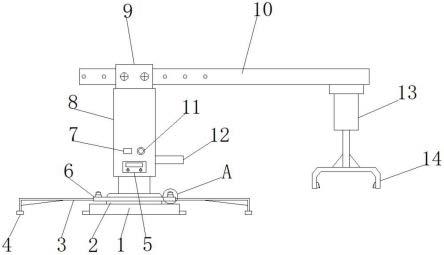
15.图1为本实用新型一种液压机械手的回转机构的整体主视结构示意图;
16.图2为本实用新型一种液压机械手的回转机构的环形滑轨与滑块连接部分主视截面结构示意图。
17.图中:1、底座;2、正反电机;3、延伸架;4、支块;5、电控器;6、环形滑轨;7、处理器;8、撑台;9、套筒;10、横臂;11、指示灯;12、凸条;13、推杆电机;14、机械手;15、滑块;16、测距传感器;17、凹槽;18、活动杆;19、弹簧;20、限位板;21、凹台。
具体实施方式
18.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
19.请参阅图1-2,本实用新型提供一种技术方案:一种液压机械手的回转机构,包括底座1,底座1顶部固定安装有正反电机2,正反电机2的传动轴顶部传动连接有撑台8,撑台8顶部固定安装有套筒9,且套筒9内固定安装有横臂10,横臂10底部一侧固定安装有推杆电机13,推杆电机13的传动轴底部传动连接有机械手14,且机械手14内两侧底部均固定安装有弹性防滑块;撑台8一侧底部固定安装有凸条12,撑台8前壁底部固定安装有处理器7和指示灯11,且撑台8靠近指示灯11的下侧固定安装有电控器5,且电控器5的信号输出端分别与正反电机2和推杆电机13的信号输入端连接;底座1顶部靠近正反电机2的外侧放置有环形
滑轨6,环形滑轨6内活动安装有滑块15,且滑块15共有两组,两组滑块15顶部均固定安装有测距传感器16;测距传感器16的数据输出端与处理器7的数据输入端连接,处理器7的信号输出端与指示灯11的信号输入端连接。
20.在这种技术方案中,通过设置有指示灯11和凸条12,在液压机械手的回转机构使用过程中,根据机械手14回转调节的起终点位,将两组滑块15置于适当位置,每当回转调节到位时,可通过测距传感器16检测间距,当间距处于设定阈值,即为凸条12位于测距传感器16上侧,则撑台8和机械手14转动到设定起点或终点点位,处理器7下达指令,指示灯11亮起,工作人员在操控电控器5过程中,可依据指示灯11是否亮起准确判断转动是否到位,相较于凭借工作经验,可规避多次调整角度问题,间接提升机械手14点位调节效率。
21.在有的技术方案中参阅图1和图2,环形滑轨6两侧均固定安装有延伸架3,且延伸架3共有四组,延伸架3延伸至底座1外侧,延伸架3底端固定安装有支块4;滑块15下端面中部开设有凹槽17,凹槽17内插接有活动杆18,活动杆18底端固定安装有限位板20,且限位板20下表面固定安装有防滑垫,活动杆18靠近限位板20的上侧套设有弹簧19;环形滑轨6内靠近滑道的下侧连通开设有凹台,且限位板20抵触在凹台21内。
22.在这种技术方案中,通过设置有延伸架3和限位板20,由于环形滑轨6架空在底座1上,且四组延伸架3均远离底座1设置,非接触设计可规避机械共振导致滑块15自动移位,同时弹簧19给予限位板20作用力,起到滑块15限位效果,进一步提升滑块15临时限位的稳定程度。
23.在有的技术方案中参阅图1,套筒9前壁两侧均贯穿有螺栓,横臂10前壁一侧开设有若干组均匀阵列的螺孔,且螺栓通过螺纹与同侧的螺孔旋接。
24.在这种技术方案中,可通过螺栓与多组螺孔的配合使用,可对横臂10的位置进行调节,适用于复杂环境。
25.在有的技术方案中参阅图1,底座1两侧均固定安装有耳板,且耳板内中部开设有定位孔。
26.在这种技术方案中,可通过耳板及定位孔可拆式固定底座1,保证吊运的稳定运行,同时符合后期转移使用需求。
27.在有的技术方案中参阅图1,延伸架3的转角处和推杆电机13的传动轴与机械手14连接处两侧均固定安装有加强筋,且加强筋为三角形结构。
28.在这种技术方案中,可通过加强筋提升组件的连接刚度,以防出现撕裂形变状况。
29.工作原理:需要说明的是,本实用新型为一种液压机械手的回转机构,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规试验方法获知。
30.在一种液压机械手的回转机构使用的时候,经耳板将底座1固定在指定工位,并经正反电机2和推杆电机13分别外接电源,工作人员通过电控器5进行控制,由正反电机2的传动轴带动机械手14回转运动,并配合推杆电机13带动机械手14上下移动,进行物料的短途吊运;
31.通过设置有指示灯11和凸条12,在液压机械手的回转机构使用过程中,根据机械手14回转调节的起终点位,将两组滑块15置于适当位置,每当回转调节到位时,可通过测距传感器16检测间距,当间距处于设定阈值,即为凸条12位于测距传感器16上侧,则撑台8和
机械手14转动到设定起点或终点点位,处理器7下达指令,指示灯11亮起,工作人员在操控电控器5过程中,可依据指示灯11是否亮起准确判断转动是否到位,相较于凭借工作经验,可规避多次调整角度问题,间接提升机械手14点位调节效率,通过设置有延伸架3和限位板20,由于环形滑轨6架空在底座1上,且四组延伸架3均远离底座1设置,非接触设计可规避机械共振导致滑块15自动移位,同时弹簧19给予限位板20作用力,起到滑块15限位效果,进一步提升滑块15临时限位的稳定程度,使用效果较为理想。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1