一种用于车轴搬运桁架机器人的支撑结构的制作方法
1.本实用新型涉及桁架机器人技术领域,尤其是一种用于车轴搬运衔桁架机器人的支撑结构。
背景技术:
2.桁架机器人属于线性移动机器人或者设备,是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。
3.针对汽车车轴搬运的桁架机器人,尤其是配备了多个机械夹爪,由集成了plc及电机驱动器的控制柜控制系统进行自动化协同搬运的桁架机器人,其在调试使用中存在如下缺陷:
4.1.运输缺陷,由于汽车底盘的车轴轴向长度较长,重量也极大,因此搭建能够配备多机械手在各轴范围内线性运动的桁架机器人,首要基础即搭建由多组支撑结构与地面地基进行连接的支撑框架,以此为基础,在支撑框架上再搭建x轴导轨;而现有的支撑结构,为满足强度需要,多为型材、钢构一体成形,其在加工后运输困难,无法灵活适配购买厂商的运输需要。
5.2.存在干涉,由于桁架机器人的搬运为在plc集成的控制柜控制的多自由度、线性搬运作业模式,桁架支撑结构的前侧或者后侧需要预留作业空间,因此需要一种新的桁架支撑结构,在满足强度保证下,其一侧作业端能够留有足够的车轴线性搬运的作业空间。
技术实现要素:
6.本技术针对上述现有生产技术中的缺点,提供一种结构合理的用于车轴搬运桁架机器人的支撑结构,从而通过分段式支撑柱、加强筋以及相关结构件的子单元进行先运输后装配,从而满足运输需要;通过单侧侧拉接地,为另一侧的线性搬运工作留出预留空间。
7.本实用新型所采用的技术方案如下:
8.一种用于车轴搬运桁架机器人的支撑结构的支撑结构,其包括第一支撑立柱,所述第一支撑立柱的底部通过设置第一高度调节地脚架设于地面,所述第一支撑立柱的顶部水平设置第二支撑立柱;所述第二支撑立柱的一端与第一支撑立柱固定连接,其另一端通过倾斜设置的第三支撑立柱与第一支撑立柱固定连接;第一支撑立柱相较于第三支撑立柱的对立侧通过倾斜设置的第四支撑立柱与地面建立连接,所述第二支撑立柱的向外延伸端设置承载结构。
9.进一步的,所述承载结构包括固设于第二支撑立柱端部的型板以及固设于第二支撑立柱立柱下方的承力板;其中,型板以及承力板的两端均向外延伸,且型板的轴向长度大于承力板的轴向长度。
10.进一步的,所述承载结构还包括对称设置于承力板与型板两侧之间的多个连接板,所述连接板的顶部边沿与型板的下表面固定连接,连接板的侧边边沿与第二支撑立柱的侧表面固定连接,连接板的底部边沿与承力板的上表面固定连接。
11.进一步的,所述第四支撑立柱的底部设置第二高度调节地脚架设于地面。
12.进一步的,所述第一支撑立柱与第二支撑立柱之间形成的夹角内通过设置第一加强筋提高连接强度。
13.进一步的,所述第一支撑立柱的下部与第一高度调节地脚间通过设置多个第二加强筋提高结构强度。
14.本实用新型的有益效果如下:
15.1.本技术的第一支撑立柱、第二支撑立柱、第二支撑立柱和第四支撑立柱由碳钢板矩形管组成,以及其他结构件的固定连接方式均为焊接;采用各部件独立运输,后组装焊接,使得整体桁架机器人所需的支撑结构散化,能够轻量化、集中运输,降低了物流便捷性和提高了空间利用率。
16.2.本技术提供的独立的支撑结构,能够在承载结构的下部留有轴向线性搬运工作的行走、搬运空间,避免了因为支撑结构空闲的限制引起的干涉问题且每个独立的支撑结构结构强度高,承载力强,能够满足大负载的需求,如对ms车轴的搬运需求。
附图说明:
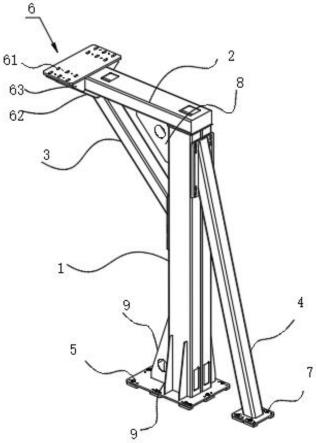
17.图1为本实用新型的第一视角立体示意图;
18.图2为本实用新型的俯视图;
19.图3为本实用新型的第二视角立体示意图;
20.图4为本实用新型中承载结构的立体示意图。
21.其中:1、第一支撑立柱;2、第二支撑立柱;3、第三支撑立柱;4、第四支撑立柱;5、第一高度调节地脚;6、承载结构;61、型板;62、承力板;63、连接板;7、第二高度调节地脚;8、第一加强筋;9、第二加强筋。
具体实施方式
22.下面结合附图,说明本实用新型的具体实施方式。
23.请参阅图1、图2、图3和图4,本实施例提供一种用于车轴搬运桁架机器人的支撑结构的实施方式:
24.本实用新型包括第一支撑立柱1,较佳地,本实施例优选矩形管碳钢板结构作为第一支撑立柱1,以获得较佳的承载强度。
25.其中,第一支撑立柱1的底部通过设置第一高度调节地脚5架设于地面,高度调节地脚的能够适用于平整光滑面的混凝土地面,其在具体使用时参照如下步骤,将固定及调节螺栓按照装配图纸插入立柱垫板,将立柱垫板按照预设的布局图在混凝土地基上校正,检查各底板是否整面紧贴在地面上,如有必要,使用补整砂浆使底板区域内的地面平整,其次,在混凝土地基上标记底板的位置,借助水准仪检查所有底板相互间的高度差。当高度差小于10mm时,无需采取其它措施。当高度差在10mm至20mm之间时,应使用平衡环。在六角螺栓上仅可插上一个平衡环,最后按照地基要求将底板焊固在地面上。
26.作为桁架机器人线性导轨部件的安装支撑平台,第一支撑立柱1的顶部水平设置第二支撑立柱2;第二支撑立柱2的一端与第一支撑立柱1固定连接,其另一端通过倾斜设置的第三支撑立柱3与第一支撑立柱1固定连接;第一支撑立柱1相较于第三支撑立柱3的对立
侧通过倾斜设置的第四支撑立柱4与地面建立连接,第二支撑立柱2的向外延伸端设置承载结构6;
27.承载结构6包括固设于第二支撑立柱2端部的型板61以及固设于第二支撑立柱立柱下方的承力板62;其中,型板61以及承力板62的两端均向外延伸,且型板61的轴向长度大于承力板62的轴向长度,以使得连接板63、型板61、承力板62之间形成稳固的三角强度结构,连接强度更高,结构件更少。
28.承载结构6还包括对称设置于承力板62与型板61两侧之间的4个连接板63,单侧各设置两个,分别位于承力板62与型材的边沿侧。连接板63的顶部边沿与型板61的下表面固定连接,连接板63的侧边边沿与第二支撑立柱2的侧表面固定连接,连接板63的底部边沿与承力板62的上表面固定连接。
29.第四支撑立柱4的底部设置第二高度调节地脚7架设于地面,以使得第四支撑立柱4能够同步与第一支撑立住进行高度调节,且与地基建立稳固连接。
30.第一支撑立柱1与第二支撑立柱2之间形成的夹角内通过设置第一加强筋8提高连接强度。
31.第一支撑立柱1的下部与第一高度调节地脚5间通过设置至少3个第二加强筋9提高结构强度,本实施例中第一支撑立柱1的四面,其前侧以及左右侧分别设置第二加强筋9提高结构强度。
32.本实用新型的应用:本技术提供的支撑结构为独立的一组地基支撑结构,由多个本技术提供的支撑结构平行并列设置,组成用于轴向设置导轨组件的桁架机架,从而完成对多个机械夹爪线性移动的平台搭建需求。
33.其中,如图1所示,本技术提供的独立的支撑结构,能够在承载结构6的下部留有轴向线性搬运工作的行走、搬运空间,且每个独立的支撑结构结构强度高,承载力强,能够满足大负载的需求,如对ms车轴的搬运需求。
34.同时,本技术的第一支撑立柱1、第二支撑立柱2、第三支撑立柱3和第四支撑立柱4由碳钢板矩形管组成,以及其他结构件的固定连接方式均为焊接;采用各部件独立运输,后组装焊接,使得整体桁架机器人所需的支撑结构散化,能够轻量化、集中运输,降低了物流便捷性和提高了空间利用率。安装时,连接处采用加装扁钢,焊接完成后进行热处理回火,喷砂处理,龙门数控加工,打磨毛刺飞边缺陷,最后进行表面处理。
35.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1