一种可缩壳的机械仿生乌龟
1.本实用新型涉及仿生动物机器人领域,更具体地说,涉及一种可缩壳的机械仿生乌龟。
背景技术:
2.随着科技的进步,人们会将仿生学与机器人领域各种先进技术有机结合,利用各种机、电、液、光等无机元器件和有机功能体所构建的机器人系统,以及其在运动机理和行为方式、感知模式和信息处理、控制协调和计算推理、能量代谢和材料结构等方面具有高级生命的形态特征,使其能够在未知的非结构化环境中精确、灵活、可靠且高效地完成各种复杂任务。已有的技术主要均为仿生海龟,特征有:1.龟壳:设有机舱;2.控制器:与驱动装置电连接;3.四肢:四个鳍状足,每个鳍状足通过舵机及其支架等驱动装置实现运动过程;4.探测装置。
3.但是现有的仿生两栖龟缺少了乌龟在遇袭时相应的缩壳保护动作,且现有的技术结构较为简单,功能较单一。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的在于提供一种可缩壳的机械仿生乌龟,它可以实现机械仿生乌龟的结构优化和机械仿生乌龟可以爬行、缩壳的功能。该技术提高了移动机械对环境的适应性,同时填补了仿生机器人在生物种类及模仿动作上的缺失,为仿生机器人的发展提供了经验和基础。
5.为解决上述问题,本实用新型采用如下的技术方案。
6.一种可缩壳的机械仿生乌龟,包括龟壳、四个鳍状足和乌龟头,还包括连杆机构、四个旋转机构、前进机构和伸缩机构,连杆机构的上端固定连接着龟壳的下端,连杆机构的左右两端分别转动连接着两个旋转机构,前进机构的前后两端均转动连接着连杆机构,前进机构的左右两端均与连杆机构转动连接,前进机构的左右两端分别啮合传动着两个旋转机构,伸缩机构的左右两端分别啮合传动着两个旋转机构,伸缩机构位于前进机构的下侧,伸缩机构与连杆机构滑动连接,伸缩机构的前端固定连接着乌龟头;可以实现机械仿生乌龟的结构优化和机械仿生乌龟可以爬行、缩壳的功能。
7.进一步的,连杆机构包括背部前端连接板、背部后端连接板、腹部前端连接板、腹部后端连接板和尾部连接板,背部前端连接板的后端固定连接着背部后端连接板的前端,尾部连接板的上下两端分布固定连接着背部后端连接板和腹部后端连接板,腹部后端连接板的前端固定连接着腹部前端连接板的后端,腹部前端连接板开设有贯穿前后的滑道,伸缩机构的两端滑动连接在滑道中;可以实现稳定乌龟身体的主体结构。
8.进一步的,旋转机构包括转动连接器、连接轴、外侧锥齿轮和内侧锥齿轮,连接轴的上端转定连接着连杆机构,连接轴转动连接着转动连接器的上下两端,外侧锥齿轮的上端齿轮固定连接着连接轴,内侧锥齿轮的下端齿轮固定连接着连接轴,外侧锥齿轮位于内
侧锥齿轮的上侧,外侧锥齿轮中的外侧齿轮固定连接着的转动杆与转动连接器转动连接,内侧锥齿轮的内侧齿轮与前进机构啮合传动,转动连接器的下端与伸缩机构啮合传动;可以通过旋转机构的转动带动乌龟的的整个足部运动,乌龟的前进。
9.进一步的,前进机构包括连接转动杆、两个蜗轮、两个蜗杆和电机,连接转动杆的前后端分别与连杆机构和电机转动连接,电机固定连接在连杆机构的后端,连接转动杆固定连接着两个蜗杆,两个蜗杆均位于连杆机构和电机之间,每个蜗杆均啮合传动着一个涡轮,每个涡轮固定连接着的轴的左右两端分别键连接着一个旋转机构,涡轮均位于伸缩机构的上侧;可以通过前进机构的蜗杆进行转动,带动了下方的涡轮进行转动,从而使得与之相连的锥齿轮带动中间的连接轴旋转,再通过一个锥齿轮的转动使得爬行机构进行转动,带动了足部的转动,可以实现乌龟的迈步。
10.进一步的,伸缩机构包括齿条、三个驱动齿轮和舵机,齿条与连杆机构滑动连接,且位于前进机构的下侧,三个驱动齿轮均转动连接在连杆机构的内侧上端面,且均与齿条的一侧啮合传动,位于齿条前侧的一个驱动齿轮与靠近齿条前侧的一个旋转机构啮合传动,位于齿条后侧的两个驱动齿轮均与靠近齿条后侧的一个旋转机构啮合传动,舵机固定连接在连杆机构的内侧上端面,且与位于齿条前侧的驱动齿轮转动连接;可以通过驱动齿轮的转动,从而带动了下方的圆盘齿轮转动,进而带动锥齿轮中间的连接轴转动,圆盘齿轮的转动带动与之啮合的圆盘齿轮转动,可以实现乌龟的足部向后转动,并且使与该圆盘齿轮啮合的齿条向后运动,可以实现乌龟头部的缩壳功能。
11.进一步的,还包括四个爬行机构,每个爬行机构包括两个转动棒和一个连接棒,两个转动杆的一端均转动连接着同一个旋转机构,两个转动杆的另一端均转动连接着一个连接棒,连接棒的中端固定连接着一个鳍状足,可以通过旋转机构的转动带动四个爬行机构的运动,实现乌龟的爬行前进。
12.进一步的,相邻两个转动连接器的下端通过圆盘齿轮互相啮合传动,可以使得左右连个爬行机构相互关联,使得乌龟的爬行动作更加协调。
13.进一步的,位于连杆机构后端的两个旋转机构均固定连接着一个防护盔甲;可以使得乌龟的两个前足向后转动后,被防护盔甲罩住,达到保护乌龟的目的。
14.进一步的,防护盔甲采用合金材质;材质坚硬可以使得防护效果好,且使得龟身轻盈,运动起来不会笨重。
15.进一步的,背部前端连接板和背部后端连接板的下端均固定连接有一对安装片,与前进机构转动连接;可以使得前进机构的涡轮安装在一对安装片中间,使得涡轮的转动更加稳定。
16.相比于现有技术,本实用新型的优点在于:
17.(1)本方案利用了两个旋转机构与连杆组成了简易的旋转器,通过旋转机构的旋转带动爬行机构做平行于连杆机构的圆周运动,从而带动整个足部的运动,可以实现乌龟的前进。
18.(2)本方案通过电机驱动前进机构的蜗轮蜗杆进行转动,带动了下方的涡轮进行转动,从而使得与之相连的锥齿轮带动中间的连接轴旋转,再通过一个锥齿轮的转动使得爬行机构进行转动,带动了足部的转动,可以实现乌龟的迈步。
19.(3)本方案通过舵机转动带动了驱动齿轮转动,从而带动了下方的圆盘齿轮转动,
进而带动锥齿轮中间的连接轴转动,圆盘齿轮的转动带动与之啮合的圆盘齿轮转动,可以实现乌龟的足部向后转动,并且使与该圆盘齿轮啮合的齿条向后运动,可以实现乌龟头部的缩壳功能,从而实现了对乌龟缩足缩头姿态的模仿。
20.(4)本方案可以使得乌龟的两个前足向后转动后,被防护盔甲罩住,达到保护乌龟的目的,符合乌龟遇险缩壳时对自身保护的状态。
21.(5)本方案可以连杆机构、伸缩机构、旋转机构、前进机构和爬行机构的相互作用,实现一系列连续的模仿乌龟的动作。
附图说明
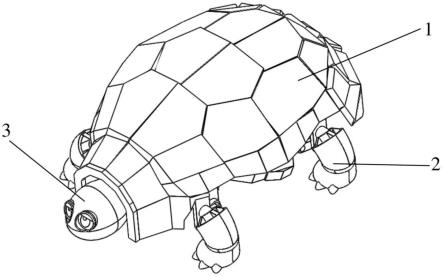
22.图1为本实用新型的外部结构示意图;
23.图2为本实用新型的内部结构示意图;
24.图3为本实用新型伸缩机构、旋转机构和前进机构的配合关系结构示意图;
25.图4为本实用新型旋转机构和前进机构的配合关系的结构示意图;
26.图5为本实用新型防护盔甲的结构安装示意图。
27.图中标号说明:
28.1龟壳、2鳍状足、3乌龟头、4转动连接器、5转动棒、6外侧锥齿轮、7连接棒、8连接轴、9齿条、10内侧锥齿轮、11安装片、12腹部前端连接板、13连接转动杆、14驱动齿轮、15腹部后端连接板、16尾部连接板、17背部后端连接板、18电机、19背部前端连接板、20转动杆、21外侧齿轮、22滑道、23蜗轮、24蜗杆、25防护盔甲。
具体实施方式
29.实施例1:
30.请参阅图1-5,一种可缩壳的机械仿生乌龟,包括龟壳1、四个鳍状足2和乌龟头3,还包括连杆机构、四个旋转机构、前进机构和伸缩机构,连杆机构的上端固定连接着龟壳1的下端,连杆机构的左右两端分别转动连接着两个旋转机构,前进机构的前后两端均转动连接着连杆机构,前进机构的左右两端均与连杆机构转动连接,前进机构的左右两端分别啮合传动着两个旋转机构,伸缩机构的左右两端分别啮合传动着两个旋转机构,伸缩机构位于前进机构的下侧,伸缩机构与连杆机构滑动连接,伸缩机构的前端固定连接着乌龟头3;可以实现仿生机械乌龟的结构优化和仿生机械乌龟可以爬行、缩壳的功能。
31.连杆机构包括背部前端连接板19、背部后端连接板17、腹部前端连接板12、腹部后端连接板15和尾部连接板16,背部前端连接板19的后端固定连接着背部后端连接板17的前端,尾部连接板16的上下两端分布固定连接着背部后端连接板17和腹部后端连接板15,腹部后端连接板15的前端固定连接着腹部前端连接板12的后端,腹部前端连接板12开设有贯穿前后的滑道22,伸缩机构的两端滑动连接在滑道22中;可以实现稳定乌龟身体的主体结构。
32.旋转机构包括转动连接器4、连接轴8、外侧锥齿轮6和内侧锥齿轮10,连接轴8的上端转定连接着连杆机构,连接轴8转动连接着转动连接器4的上下两端,外侧锥齿轮6的上端齿轮固定连接着连接轴8,内侧锥齿轮10的下端齿轮固定连接着连接轴8,外侧锥齿轮6位于内侧锥齿轮10的上侧,外侧锥齿轮6中的外侧齿轮21固定连接着的转动杆20与转动连接器4
转动连接,内侧锥齿轮10的内侧齿轮与前进机构啮合传动,转动连接器4的下端与伸缩机构啮合传动;可以通过旋转机构的转动带动乌龟的的整个足部运动,乌龟的前进。
33.前进机构包括连接转动杆13、两个蜗轮23、两个蜗杆24和电机18,连接转动杆13的前后端分别与连杆机构和电机18转动连接,电机18固定连接在连杆机构的后端,连接转动杆13固定连接着两个蜗杆24,两个蜗杆24均位于连杆机构和电机18之间,每个蜗杆24均啮合传动着一个涡轮23,每个涡轮23固定连接着的轴的左右两端分别键连接着一个旋转机构,涡轮23均位于伸缩机构的上侧;可以通过前进机构的蜗杆24进行转动,带动了下方的涡轮23进行转动,从而使得与之相连的锥齿轮带动中间的连接轴8旋转,再通过一个锥齿轮的转动使得爬行机构进行转动,带动了足部的转动,可以实现乌龟的迈步。
34.伸缩机构包括齿条9、三个驱动齿轮14和舵机,齿条9与连杆机构滑动连接,且位于前进机构的下侧,三个驱动齿轮14均转动连接在连杆机构的内侧上端面,且均与齿条9的一侧啮合传动,位于齿条9前侧的一个驱动齿轮14与靠近齿条9前侧的一个旋转机构啮合传动,位于齿条9后侧的两个驱动齿轮14均与靠近齿条9后侧的一个旋转机构啮合传动,舵机固定连接在连杆机构的内侧上端面,且与位于齿条9前侧的驱动齿轮14转动连接;可以通过驱动齿轮14的转动,从而带动了下方的圆盘齿轮转动,进而带动锥齿轮中间的连接轴8转动,圆盘齿轮的转动带动与之啮合的圆盘齿轮转动,可以实现乌龟的足部向后转动,并且使与该圆盘齿轮啮合的齿条9向后运动,可以实现乌龟头部的缩壳功能。
35.还包括四个爬行机构,每个爬行机构包括两个转动棒5和一个连接棒7,两个转动杆5的一端均转动连接着同一个旋转机构,两个转动杆5的另一端均转动连接着一个连接棒7,连接棒7的中端固定连接着一个鳍状足2,可以通过旋转机构的转动带动四个爬行机构的运动,实现乌龟的爬行前进。
36.相邻两个转动连接器4的下端通过圆盘齿轮互相啮合传动;可以使得左右连个爬行机构相互关联,使得乌龟的爬行动作更加协调。
37.位于连杆机构后端的两个旋转机构均固定连接着一个防护盔甲25;可以使得乌龟的两个前足向后转动后,被防护盔甲25罩住,达到保护乌龟的目的。
38.背部前端连接板19和背部后端连接板17的下端均固定连接有一对安装片11,与前进机构转动连接;可以使得前进机构的涡轮23安装在一对安装片11中间,使得涡轮23的转动更加稳定。
39.工作原理:当人们需要机械仿生乌龟爬行去做一些探测活动时,通过现有的与驱动装置电连接的控制器控制电机18转动,电机18的转动,带动了连接转动杆13,从而带动了固定连接在连接转动杆13上两端的两个蜗杆24转动,两个蜗杆24的转动带动了与之相啮合的涡轮23转动,涡轮23的转动带动了与之相连的内侧锥齿轮10转动,内侧锥齿轮10的转动带动了连接轴8转动,连接轴8的转动带动了与之相连的外侧锥齿轮6转动,外侧锥齿轮6是转动带动了与之固定连接的转动棒5转动,转动棒5的转动带动了固定连接在连接棒7上的鳍状足2做圆周运动,可以实现机械仿生乌龟的爬行,从而在陆地上用现有的探测装置进行探测活动。
40.当机械仿生乌龟运动的过程中遇险或者遇袭时,现有的感知装置就会将遇袭的信号发送给机械仿生乌龟中的控制器,控制器就会通过控制舵机转动,舵机的转动会带动驱动齿轮14转动,驱动齿轮14的转动会带动与之啮合的前端圆盘齿轮转动,前端圆盘齿轮的
转动会带动与之啮合的另一个前端圆盘齿轮转动,圆盘齿轮为旋转机构的一部分,从而带动前端的两个旋转机构转动,从而带动机械仿生乌龟的前足向后转动;同时,驱动齿轮14的转动会带动与之啮合的齿条9的向后滑动,使得与齿条9前端固定连接的乌龟头3向后运动,缩进龟壳1,齿条9的向后滑动会带动与之啮合的后端的两个驱动齿轮14转动,后端的两个驱动齿轮14的转动带动与它们同时啮合的后端圆盘齿轮,同理,从而带动机械仿生乌龟的后足向后转动,同时,使得位于连杆机构后端的两个旋转机构均固定连接着的一个防护盔甲25也会向外转动,对机械仿生乌龟进行保护,可以实现机械仿生乌龟遇险时,乌龟的足部向后转动和乌龟头部的缩壳功能,还可以通过防护盔甲25对机械仿生乌龟进行保护。
41.实施例2:
42.与实施例1的不同的是:防护盔甲25采用合金材质;材质坚硬可以使得防护效果好,且使得龟身轻盈,运动起来不会笨重。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1