一种手势控制机械臂的制作方法
1.本实用新型涉及机械臂技术领域,特别是涉及一种手势控制机械臂。
背景技术:
2.中国对机械臂的需求一直以飞快的速度在增长,目前来说,中国早已成为全球机械臂市场的一个不可或缺的组成部分,对于一些人机互动娱乐场所,也伴随着机械臂的投入使用;
3.现有的人机互动娱乐场所的机械臂在使用时,机械臂可以通过人类的手势实现互动,具有较高的灵敏性,为娱乐场所增加了科技感,但是现有的机械臂在乒乓球联系馆的内部投入使用时,机械臂的端部通常采用连接件连接固定的使用结构,使用者不能够根据实际使用地点调试和拆卸,因此机械臂的使用地点会受到限制。
4.因此,现有的手势控制机械臂,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种手势控制机械臂,通过设置连接片的前端连接有液压缸,液压缸的输出端连接有连接端,解决了现有的人机互动娱乐场所的机械臂端部,通常采用连接件连接固定的使用结构,使用者不能够根据实际使用地点调试和拆卸的问题。
6.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
7.本实用新型为一种手势控制机械臂,包括第一手臂,其特征在于,所述第一手臂的前端通过螺栓连接有连接片,所述连接片的前端可拆卸连接有液压缸,所述液压缸的输出端可拆卸连接有连接端;
8.所述连接端包括连接圈、夹片、套结圈和减震海绵,所述连接圈的内壁嵌入有减震海绵,所述连接圈的底壁焊接有夹片和套结圈,所述夹片等间距分布在套结圈的外围,所述夹片和套结圈之间夹持有收纳框,所述连接圈的内腔与收纳框的内腔连通;
9.所述夹片呈弧形结构,所述夹片的横截面呈l状,所述套结圈的内壁与减震海绵的内壁共面,所述连接圈的外壁与液压缸的输出轴固定。
10.进一步地,所述第一手臂的端部与第二手臂的上端转动连接,所述第二手臂的底端与转动底盘的输出轴固定;
11.具体的,第一手臂、第二手臂和转动底盘在同时工作时,可以对液压缸的使用位置调节,从而实现液压缸带动连接端的使用位置调节,便于连接端带动收纳框对乒乓球收纳。
12.进一步地,所述第二手臂上端的前部可拆卸连接有人机互动模块,所述人机互动模块与转动底盘、第二手臂、第一手臂和液压缸的输出端连接;
13.具体的,人机互动模块能够带动第一手臂、第二手臂和转动底盘工作,从而实现第一手臂、第二手臂和转动底盘控制收纳框的使用位置。
14.进一步地,所述收纳框的外壁等间距贯穿有圆孔,圆孔等间距分布有多组。
15.进一步地,所述收纳框具有弹性,所述收纳框可以折叠;
16.具体的,具有弹性的收纳框可以避免乒乓球反弹,同时可以折叠的收纳框能够便于使用者收纳。
17.进一步地,所述转动底盘呈圆片状结构,人机互动模块的底端的轴线与转动底盘的轴线共线。
18.本实用新型具有以下有益效果:
19.该机械臂上的液压缸通过连接片与第一手臂连接,液压缸的输出端与连接端固定,连接端的下部连接有收纳框,当使用者通过该机械臂练习乒乓球时,人机互动模块可以根据乒乓球的掉落位置带动第一手臂、第二手臂、转动底盘和液压缸通过连接端带动收纳框对乒乓球收纳,从而便于后续使用者对乒乓球使用,解决了现有的人机互动娱乐场所的机械臂端部,通常采用连接件连接固定的使用结构,使用者不能够根据实际使用地点调试和拆卸的问题。
20.该机械臂中的连接圈在使用时,套结圈与夹片之间的间隙卡接有收纳框,可以便于液压缸通过连接端带动收纳框对乒乓球收纳,同时夹片的横截面呈l状,能够便于夹片配合套结圈对收纳框夹持,液压缸能够对连接端的使用位置调节,实现液压缸带动连接端配合收纳框对乒乓球收纳。
21.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
22.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
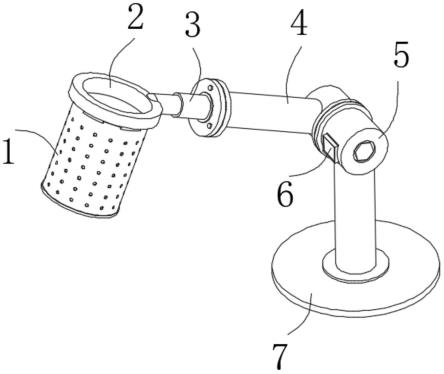
23.图1为本实用新型的整体结构图;
24.图2为本实用新型中液压缸与连接端和连接片的连接结构图;
25.图3为本实用新型中液压缸与连接端的拆解示意图。
26.附图中,各标号所代表的部件列表如下:
27.1、收纳框;2、连接端;21、连接圈;22、夹片;23、套结圈;24、减震海绵;3、液压缸;4、第一手臂;5、第二手臂;6、人机互动模块;7、转动底盘;8、连接片。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
29.实施例
30.请参阅图1-3所示,本实施例为一种手势控制机械臂,包括第一手臂4,第一手臂4的前端通过螺栓连接有连接片8,连接片8的前端可拆卸连接有液压缸3,液压缸3的输出端可拆卸连接有连接端2,第一手臂4的端部与第二手臂5的上端转动连接,第二手臂5的底端与转动底盘7的输出轴固定,第二手臂5上端的前部可拆卸连接有人机互动模块6,人机互动模块6与转动底盘7、第二手臂5、第一手臂4和液压缸3的输出端连接,收纳框1的外壁等间距
贯穿有圆孔,圆孔等间距分布有多组,收纳框1具有弹性,收纳框1可以折叠,转动底盘7呈圆片状结构,人机互动模块6的底端的轴线与转动底盘7的轴线共线;
31.该机械臂中的人机互动模块6为现有技术中结构,主要起到的作用是控制转动底盘7、第二手臂5、第一手臂4和液压缸3的输出端工作;
32.该机械臂在使用时,使用者预先将转动底盘7的底部固定在合适的部位,此时能够实现机械臂与合适的部位固定,当使用者在该机械臂的前部击打乒乓球,人机互动模块6能够精准捕捉乒乓球的位置,随后人机互动模块6能够控制转动底盘7、第二手臂5和第一手臂4工作,同时人机互动模块6还可以控制液压缸3工作,当转动底盘7、第二手臂5和第一手臂4工作时,能够通过液压缸3的位置改变,从而实现液压缸3带动连接端2对收纳框1的使用位置改变,从而便于收纳框1对使用者击打的乒乓球收纳;
33.当使用者将收纳框1与连接端2连接时,使用者将收纳框1的顶面嵌入在夹片22与套结圈23之间的间隙中,此时套结圈23能够配合夹片22对收纳框1的上部夹持,从而实现收纳框1固定在连接端2上。
34.其中如图2、3所示,连接端2包括连接圈21、夹片22、套结圈23和减震海绵24,连接圈21的内壁嵌入有减震海绵24,连接圈21的底壁焊接有夹片22和套结圈23,夹片22等间距分布在套结圈23的外围,夹片22和套结圈23之间夹持有收纳框1,连接圈21的内腔与收纳框1的内腔连通,夹片22呈弧形结构,夹片22的横截面呈l状,套结圈23的内壁与减震海绵24的内壁共面,连接圈21的外壁与液压缸3的输出轴固定;
35.该机械臂中的连接端2在使用时,使用者将连接圈21的外壁与液压缸3的输出端固定,此时液压缸3的输出端能够对连接圈21的使用位置调节,当使用者将收纳框1与连接端2连接时,使用者将收纳框1的顶面嵌入在夹片22与套结圈23之间的间隙中,此时套结圈23能够配合夹片22对收纳框1的上部夹持,从而实现收纳框1固定在连接端2上,从而实现连接端2带动收纳框1对乒乓球收纳;
36.当连接端2在使用时,夹片22的横截面呈l状,可以便于收纳框1的上部固定在夹片22与套结圈23之间,连接端2在对乒乓球收纳时,减震海绵24能够降低连接圈21对乒乓球的斥力,从而避免乒乓球在连接圈21的内部反弹。
37.以上仅为本使用新型的优选实施例,并不限制本使用新型,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本使用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1