一种膝关节减负装置
1.本实用新型属于运动辅助器械领域,具体涉及一种膝关节减负装置。
背景技术:
2.在日常生活中坐站转移和行走是最常见的运动,也是进行其它各项生活的前提,对于下肢肌肉力量、前庭控制能力会出现明显减退;在完成站起动作时,膝关节与髋关节的角度变化较小,站起动作的初始阶段上身前倾幅度较小,并且在站起结束阶段,下肢无法完全伸展,由于关节角度变化的特点对膝关节的负担加重。在完成由站到坐过程时对下肢力量也存在一定要求。此外在行走、爬楼梯等过程中,下肢力量薄弱会出现打弯的现象,因此引发摔倒。目前针对以上问题,部分采用外骨骼机器人解决,但由于外骨骼机器人结构复杂,设备体积较大,一般适用于丧失下肢活动能力的人群;部分采用弹簧等来减轻膝关节的负担,但在屈腿过程中,会增加膝关节弯曲的力量,此外在坐下过程中会不断增加膝关节弯曲的力量,在完成之后需要释放弹簧所存储的能量;采用弹簧助力,弹簧的作用只和膝关节的姿态有关,可能会对步态产生不良的影响;此外目前对膝关节助力多采用电机助力的形式,帮助膝关节按照预定轨迹进行助力,在膝关节活动过程中对膝关节提供相同运动趋势的助力,以此起到膝关节助力的作用,在控制方面,部分装置通过一侧腿的运动控制另一侧腿的运动,需要对另一侧腿的运动进行预测。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种膝关节减负装置,能够帮助使用者站立或屈膝时提供支撑力,以避免膝盖关节打弯。
4.为实现上述目的及其他相关目的,本实用新型提供一种膝关节减负装置,包括:大腿固定部,用于附于在大腿上;小腿固定部,与所述大腿固定部转动配合,用于附于在小腿上;减负装置,包括:膝关节制动装置和/或膝关节助力装置;所述膝关节制动装置设置在所述大腿固定部与小腿固定部之间,被装配为能够限制所述大腿固定部与所述小腿固定部相对转动;所述膝关节助力装置设置在所述大腿固定部与小腿固定部之间,被装配为对所述大腿固定部与小腿固定部相对转动提供助力;足底流体驱动装置,被设置为能够驱动所述减负装置作用。
5.根据本实用新型一实施例,所述膝关节制动装置包括:制动件,作用于所述大腿固定部与小腿固定部转动连接处,以限制所述大腿固定部与小腿固定部相对转动;第一流体执行元件,与所述制动件连接,用于将压力能量转换成驱动所述制动件限制所述大腿固定部与小腿固定部相对转动的能量;第一气管,一端与所述第一流体执行元件连接,另一端与所述足底流体驱动装置连接。
6.根据本实用新型一实施例,所述膝关节助力装置包括:连杆,一端转动设置在所述大腿固定部或小腿固定部上;第二流体执行元件,与所述连杆另一端铰接,用于将压力能量做功转换成驱动所述连杆推动所述大腿固定部或小腿固定部相对转动的能量;第二管路,
一端与所述第二流体执行元件连接,另一端与所述足底流体驱动装置连接。
7.根据本实用新型一实施例,所述膝关节助力装置还包括:限位件,固定设置在所述小腿固定部上;第三流体执行元件,设置在所述大腿固定部和小腿固定部之间,所述第三流体执行元件沿所述限位件活动,所述第三流体执行元件被装配为能够将压力能量做功转换成推动所述小腿固定部相对所述大腿固定部转动的能量;固定件,被装配为与所述第三流体执行元件相配合使所述小腿固定部相对于所述大腿固定部转动;第三管路,一端与所述第三流体执行元件连接,另一端与所述足底流体驱动装置连接。
8.根据本实用新型一实施例,所述大腿固定部上设有滑槽,所述连杆上设有与所述滑槽相互配合的限位销。
9.根据本实用新型一实施例,所述大腿固定部和小腿固定部上均设置有绑带。
10.根据本实用新型一实施例,所述大腿固定部包括大腿安装件、大腿捆绑件;所述大腿安装件通过柔性件或球铰连接在所述大腿捆绑件上。
11.根据本实用新型一实施例,所述小腿固定部包括小腿安装件、小腿捆绑件;所述小腿安装件通过柔性件或球铰连接在所述小腿捆绑件上。
12.根据本实用新型一实施例,所述足底流体驱动装置设置在与所述膝关节减负装置同侧腿的足底。
13.根据本实用新型一实施例,所述大腿固定部与所述小腿固定部之间的转动轴线与膝关节转动轴线重合或接近。
14.本实用新型的技术效果在于,在足底流体驱动装置、膝关节制动装置和/或膝关节助力装置配合使用下,当使用者行走过程中,重心转移到一侧腿上时,该侧腿作为支撑腿,足底流体驱动装置所受压力不断增加,膝关节助力装置对膝关节作用,使下肢趋于竖直状态,给予膝关节一定的助力作用;当足底压力减弱,对膝关节作用力减弱直至消失,膝关节可以自由进行活动;在由站立到坐的状态过程中,足底流体驱动装置压缩,驱动膝关节制动装置和膝关节助力装置对使用者膝关节弯曲给予一定的抑制作用;增加运动过程的稳定性,在由坐到站立状态运动过程中,可对使用者下肢给予一定的助力作用,减少膝关节处的关节力矩,帮助使用者完成站立。此外,膝关节制动装置和/或膝关节助力装置通过设置在同侧足底的足底流体驱动装置进行驱动,无需预测另一侧腿的运动情况,安全可靠,控制简单。同时,本实用新型无需动力源输入,结构简单,通过自身重心变化完成对膝关节助力作用,使用者可以较大程度上进行主动控制。足底流体驱动和弹簧的作用机理不同,其作用直接和足底承压的情况相关,腿部处于支撑相时可以更好地发挥作用,对摆动的腿部限制较少,在一定的情况下,可以更好地适应膝关节的需要。
附图说明
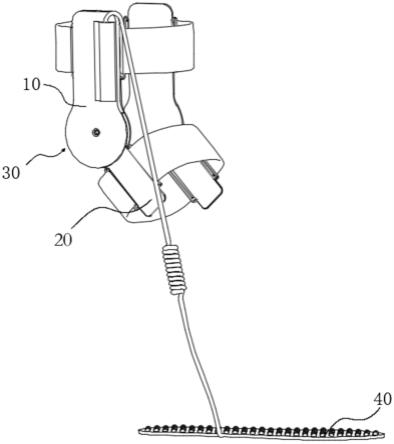
15.图1为本实用新型所提供的膝关节减负装置一具体实施例的立体图;
16.图2为本实用新型所提供的膝关节减负装置一具体实施例的另一立体图;
17.图3为本实用新型所提供的膝关节减负装置一具体实施例的平面图;
18.图4为本实用新型所提供的膝关节减负装置另一具体实施例的立体图;
19.图5为本实用新型所提供的膝关节减负装置的减负装置一具体实施例的立体图;
20.图6为本实用新型所提供的膝关节减负装置再一具体实施例的立体图;
21.图7为本实用新型所提供的膝关节减负装置的膝关节助力装置一具体实施例的平面图。
具体实施方式
22.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
23.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图示中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
24.请参见图1-7所示,本实施例还提供一种膝关节减负装置适应上述控制方法,包括:大腿固定部10,用于固定在人体大腿上;小腿固定部20,与所述大腿固定部10相对转动配合,用于固定在人体小腿上;所述大腿固定部10和小腿固定部20之间设有减负装置30,以给予膝关节助力的作用;其中,所述大腿固定部10与小腿固定部20的转动轴线和膝关节转动轴线重合或接近。所述减负装置30包括膝关节制动装置31和/或膝关节助力装置32,所述膝关节制动装置31设置在所述大腿固定部10与小腿固定部20转动中心,被装配为能够限制所述大腿固定部10与所述小腿固定部20相对转动;所述膝关节助力装置32设置在所述大腿固定部10与小腿固定部20转动中心,被装配为对所述大腿固定部10与小腿固定部20相对转动提供助力。足底流体驱动装置40,被设置为能够驱动所述膝关节制动装置31和膝关节助力装置32作用。
25.其中,所述膝关节制动装置31包括:制动件311,作用于所述大腿固定部10与小腿固定部20转动连接处,以限制所述大腿固定部10与小腿固定部20相对转动;第一流体执行元件312,与所述制动件311固定连接,用于将压力能量转换成驱动所述制动件311限制所述大腿固定部10与小腿固定部20相对转动的能量;第一气管313,一端与所述第一流体执行元件312连接,另一端与所述足底流体驱动装置40连接。
26.其中,所述膝关节助力装置32包括:连杆321,一端转动设置在所述大腿固定部10或小腿固定部20上;第二流体执行元件322,与所述连杆321另一端铰接,用于将压力能量做功转换成驱动所述连杆321推动所述大腿固定部10或小腿固定部20相对转动的能量;第二管路323,一端与所述第二流体执行元件322连接,另一端与所述足底流体驱动装置40连接。
27.其中,所述膝关节助力装置32还包括:限位件321
′
,设置为圆弧形结构,且平行于所述小腿固定部20相对大腿固定部10旋转方向固定设置在所述小腿固定部20上;第三流体执行元件322
′
,设置在所述大腿固定部10和小腿固定部20之间,所述第三流体执行元件322
ꢀ′
沿所述限位件321
′
的轨道活动,所述第三流体执行元件322
′
被装配为能够将压力能量做功转换成推动所述小腿固定部相对所述大腿固定部转动的能量;固定件323
′
,设置为一转动杆,与所述第三流体执行元件322
′
固定连接,所述转动杆一端固定设置在所述大腿固定部10上,另一端转动设置在所述小腿固定部20和大腿固定部10的转动中心,当所述第三流
体执行元件322
′
沿所述限位件321
′
的轨道相对推动所述转动杆时,由于限位件321
′
固定在小腿固定部20上,所述小腿固定部20相对于所述大腿固定部10转动;第三管路324
′
,一端与所述第三流体执行元件322
′
连接,另一端与所述足底流体驱动装置40连接;所述限位件321
′
上设置有限位销325
′
,以限制所述第三流体执行元件322
′
的活动范围。
28.在一具体实施例中,所述膝关节减负装置30为膝关节制动装置31或膝关节助力装置32,所述足底流体驱动装置40对应设置成为一整块足底流体驱动部,所述足底流体驱动部和第一流体执行元件或第二流体执行元件连接。当单侧腿支撑时,通过所述足底气囊对支撑腿侧的所述第一流体执行元件312或第二流体执行元件322进行驱动,以驱使其限制/推动所述大腿固定部10相对小腿固定部20转动;当双侧腿支撑时,足底气囊的压缩力会减小,所述第一流体执行元件312或第二流体执行元件322对所述大腿固定部10相对小腿固定部20转动的限制力/推动力减小。简化版膝关节减负装置能给予使用者行走上的助力减负效果。
29.在一具体实施例中,所述膝关节减负装置30为膝关节制动装置31和膝关节助力装置32,所述足底流体驱动装置对应设置成前脚掌流体驱动部41和后脚掌流体驱动部42,所述前脚掌流体驱动部41与所述膝关节助力装置32连接;所述后脚掌流体驱动部42与所述膝关节制动装置31连接。通过后脚掌流体驱动部42对所述第一流体执行元件312驱动,以驱使其推动所述制动件311限制所述大腿固定部10相对小腿固定部20转动,给予旋转上的阻力。当使用者由站到坐时,人体中心侧重在后脚掌,能够对膝关节弯曲起到一定的抑制作用,减少膝关节力矩,增加由站到坐的稳定性,避免膝盖打软突然坐下,从而导致受伤,减少其过程中意外的发生。通过前脚掌流体驱动部41对所述第二流体执行元件322驱动,以驱使其推动所述连杆321进一步推动所述大腿固定部10或小腿固定部20,给予旋转上的推动力。当使用者由坐到站时,人体重心侧重在前脚掌,能够对推动膝关节伸直,减少膝关节力矩,从而帮助使用者完成由坐到站立的动作。
30.同时,当使用者双侧腿支撑时,前脚掌流体驱动部和后脚掌流体驱动部的压缩力会减小,所述第一流体执行元件312和第二流体执行元件322对所述大腿固定部10相对小腿固定部 20转动的限制力/推动力减小,此时膝关节能够弯曲。
31.在一具体实施例中,所述足底流体驱动装置根据使用者的体重进行设置,被设置为单侧腿支撑时,能够驱动所述膝关节减负装置作用,双侧腿支撑时,所述膝关节减负装置的作用力减小不影响膝关节的转动。
32.在一具体实施例中,所述大腿固定部10上设有滑槽,所述连杆321上设有与所述滑槽相互配合的限位销,以限制连杆321长度方向上的活动范围,从而调整了连杆321推动所述大腿固定部10相对小腿固定部20转动的角度大小,避免因意外状况导致的转动幅度过大从而让使用者受伤。
33.在一具体实施例中,所述大腿固定部10和小腿固定部20上均设置有供绑带穿插的孔槽,孔槽上穿插有绑带,使用者可以通过绑带将装置固定在腿部;同时所述大腿固定部和小腿固定部上还包裹有柔性亲肤材料,例如可以采用乳胶或硅胶,以避免对使用者身体造成异样接触感;足底气囊上也设置有耐摩擦的材料隔绝,以增加装置的使用寿命,避免摩擦损坏气囊。
34.其中,所述小腿固定部包括小腿安装件、小腿捆绑件;所述小腿安装件通过柔性件
或球铰连接在所述小腿捆绑件上;所述大腿固定部包括大腿安装件、大腿捆绑件;所述大腿安装件通过柔性件或球铰连接在所述大腿捆绑件上。
35.实施例2
36.本实施例还提供包括上述任意一种膝关节减负装置的使用方法,通过足底流体驱动装置根据人体在行走、站立过程中重心位置的改变对同侧减负装置进行驱动,实现对同侧膝关节减负的作用,如下:
37.一种减负装置设置为膝关节制动装置的膝关节减负装置的使用方法,包括:将大腿固定部安装在大腿外侧,将小腿固定部安装在小腿外侧,将足底流体驱动装置设置在足底处;当单侧足底受力时,所述足底流体驱动装置驱动所述膝关节制动装置,所述膝关节制动装置限制所述大腿固定部相对小腿固定部转动,使得膝关节保持一定姿态;此时足底受力侧膝关节不能转动,足底不受力侧膝关节能够自由转动;当双侧足底受力时,所述膝关节制动装置对所述大腿固定部相对小腿固定部转动的限制阻力减小,此时,双侧膝关节能够转动。
38.在一具体实施例中,所述足底流体驱动装置根据人体重位置的改变对膝关节制动装置进行驱动,人体重心转移到单足时,所述同侧足底流体驱动装置压力达到阈值,对所述膝关节制动装置驱动,限制膝关节活动。当人体重心位置转移到另一足的过程中,膝关节限制侧的足底流体驱动装置所受压力逐渐减小,对所述该侧膝关节制动装置的驱动力逐渐减小,对所述膝关节限制作用逐渐减弱,直至该侧膝关节恢复自由活动。
39.一种减负装置设置为膝关节助力装置的膝关节减负装置的使用方法,包括:将大腿固定部安装在大腿上,将小腿固定部安装在小腿上,将足底流体驱动装置设置在足底处;当单侧足底受力时,所述足底流体驱动装置驱动所述膝关节助力装置,所述膝关节助力装置推动所述大腿固定部相对小腿固定部转动,使得膝关节趋于伸直状态;此时足底受力侧膝关节受到使其趋于伸直的动力,足底不受力侧膝关节能够自由转动;当双侧足底受力且处于正常站立姿态时,所述膝关节助力装置对所述大腿固定部相对小腿固定部转动的所提供的趋于伸直的动力减小,此时,双侧膝关节能够转动。
40.在一具体实施例中,所述足底流体驱动装置根据人体重位置的改变对膝关节助力装置进行驱动,人体重心转移到单足时,所述同侧足底流体驱动装置压力逐渐增大,对所述膝关节助力装置驱动,使得膝关节趋于伸直状态。当人体重心位置转移到另一足的过程中,膝关节助力伸直侧的足底流体驱动装置所受压力逐渐减小,对所述该侧膝关节助力装置的驱动力逐渐减小,对所述膝关节助力伸直作用逐渐减弱,直至该侧膝关节恢复自由活动。
41.一种减负装置包括膝关节制动装置和膝关节助力装置的膝关节减负装置的使用方法,包括:将大腿固定部安装在大腿上,将小腿固定部安装在小腿上,将足底流体驱动装置设置在足底处;当前脚掌受力时,所述足底流体驱动装置驱动所述膝关节助力装置,以对膝关节伸直提供助力;当后脚掌受力时,所述足底流体驱动装置驱动所述膝关节制动装置,以对膝关节状态的保持提供助力;当前脚掌、后脚掌均受力且为单侧腿支撑时,所述足底流体驱动装置驱动所述膝关节助力装置和所述膝关节制动装置同时作用,膝关节活动受限,使其趋向于伸直状态,为双侧腿时,所述膝关节助力装置和所述膝关节制动装置作用力减小,膝关节能够弯曲;当前脚掌、后脚掌均不受力时,膝关节可自由旋转。
42.在一具体实施例中,所述足底流体驱动装置划分为前脚掌区域与后脚掌区域;根
据步态行走过程:支撑前期,此时足跟着地,人体重心转移到足跟位置,所述后脚掌区域所受压力逐渐增大,膝关节制动装置制动作用也逐渐增强,限制膝关节姿态;支撑初期与中期,此时足跟着地逐渐过渡到全足着地,人体重心转移至全足,此时后脚掌区域压力逐渐减小,膝关节制动装置制动效果减弱,此时前脚掌区域所受压力逐渐增大,所述膝关节助力装置助力效果增强,驱使膝关节趋于伸直状态;当人体重心全部转移至单侧全足时,膝关节助力装置与膝关节制动装置同时作用,驱使支撑侧趋于伸直状态;支撑末期,此时人体重心向另一侧足转移,此时支撑侧足跟离地,足跟着地,此时所述前脚掌区域所受压力逐渐增大,使得膝关节趋于或保持伸直状态。
43.综上所述,本实用新型的技术效果在于,在足底流体驱动装置、膝关节制动装置和/或膝关节助力装置配合使用下,当使用者行走过程中,重心转移到一侧腿上时,该侧腿作为支撑腿,足底流体驱动装置所受压力不断增加,膝关节助力装置对膝关节作用,使下肢趋于竖直状态,给予膝关节一定的助力作用;当足底压力减弱,对膝关节作用力减弱直至消失,膝关节可以自由进行活动;在由站立到坐的状态过程中,足底流体驱动装置压缩,驱动膝关节制动装置和膝关节助力装置对使用者膝关节弯曲给予一定的抑制作用;增加运动过程的稳定性,在由坐到站立状态运动过程中,可对使用者下肢给予一定的助力作用,减少膝关节处的关节力矩,帮助使用者完成站立。此外,膝关节制动装置和/或膝关节助力装置通过设置在同侧足底的足底流体驱动装置进行驱动,无需预测另一侧腿的运动情况,安全可靠,控制简单。同时,本实用新型无需动力源输入,结构简单,通过自身重心变化完成对膝关节助力作用,使用者可以较大程度上进行主动控制。足底流体驱动和弹簧的作用机理不同,其作用直接和足底承压的情况相关,腿部处于支撑相时可以更好地发挥作用,对摆动的腿部限制较少,在一定的情况下,可以更好地适应膝关节的需要。
44.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
45.在本文的描述中,提供了许多特定细节,诸如部件和/或方法的实例,以提供对本实用新型实施例的完全理解。然而,本领域技术人员将认识到可以在没有一项或多项具体细节的情况下或通过其他设备、系统、组件、方法、部件、材料、零件等等来实践本实用新型的实施例。在其他情况下,未具体示出或详细描述公知的结构、材料或操作,以避免使本实用新型实施例的方面变模糊。
46.在整篇说明书中提到“一个实施例”、“实施例”或“具体实施例”意指与结合实施例描述的特定特征、结构或特性包括在本实用新型的至少一个实施例中,并且不一定在所有实施例中。因而,在整篇说明书中不同地方的短语“在一个实施例中”、“在实施例中”或“在具体实施例中”的各个表象不一定是指相同的实施例。此外,本实用新型的任何具体实施例的特定特征、结构或特性可以按任何合适的方式与一个或多个其他实施例结合。应当理解本文所述和所示的实用新型实施例的其他变型和修改可能是根据本文教导的,并将被视作本实用新型精神和范围的一部分。
47.还应当理解还可以以更分离或更整合的方式实施附图所示元件中的一个或多个,或者甚至因为在某些情况下不能操作而被移除或因为可以根据特定应用是有用的而被提
供。
48.另外,除非另外明确指明,附图中的任何标志箭头应当仅被视为示例性的,而并非限制。此外,除非另外指明,本文所用的术语“或”一般意在表示“和/或”。在术语因提供分离或组合能力是不清楚的而被预见的情况下,部件或步骤的组合也将视为已被指明。
49.如在本文的描述和在下面整篇权利要求书中所用,除非另外指明,“一个”、和“该”包括复数参考物。同样,如在本文的描述和在下面整篇权利要求书中所用,除非另外指明,“在
…
中”的意思包括“在
…
中”和“在
…
上”。
50.本实用新型所示实施例的上述描述(包括在说明书摘要中所述的内容)并非意在详尽列举或将本实用新型限制到本文所公开的精确形式。尽管在本文仅为说明的目的而描述了本实用新型的具体实施例和本实用新型的实例,但是正如本领域技术人员将认识和理解的,各种等效修改是可以在本实用新型的精神和范围内的。如所指出的,可以按照本实用新型所述实施例的上述描述来对本实用新型进行这些修改,并且这些修改将在本实用新型的精神和范围内。
51.本文已经在总体上将系统和方法描述为有助于理解本实用新型的细节。此外,已经给出了各种具体细节以提供本实用新型实施例的总体理解。然而,相关领域的技术人员将会认识到,本实用新型的实施例可以在没有一个或多个具体细节的情况下进行实践,或者利用其它装置、系统、配件、方法、组件、材料、部分等进行实践。在其它情况下,并未特别示出或详细描述公知结构、材料和/或操作以避免对本实用新型实施例的各方面造成混淆。
52.因而,尽管本实用新型在本文已参照其具体实施例进行描述,但是修改自由、各种改变和替换亦在上述公开内,并且应当理解,在某些情况下,在未背离所提出实用新型的范围和精神的前提下,在没有对应使用其他特征的情况下将采用本实用新型的一些特征。因此,可以进行许多修改,以使特定环境或材料适应本实用新型的实质范围和精神。本实用新型并非意在限制到在下面权利要求书中使用的特定术语和/或作为设想用以执行本实用新型的最佳方式公开的具体实施例,但是本实用新型将包括落入所附权利要求书范围内的任何和所有实施例及等同物。因而,本实用新型的范围将只由所附的权利要求书进行确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1