一种柔性机械手的制作方法
1.本实用新型属于机械手技术领域,特别涉及一种柔性机械手。
背景技术:
2.机械手指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。其主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、轻工和原子能等部门;
3.目前自动化包装工业中,多采用机械手对包装盒或者包装罐等包装产品进行抓取,然而现有的机械手,在使用期间具有一定的局限性于不足,在具体使用时,由于机械手的基体整体上硬质材料制作而成,其在抓取功能上存在不足,其夹持端部与物品的接触面的摩擦力较小,尤其是圆形或圆柱形物体,在夹取过程中,经常会发生物品脱落的现象,并且使用期间,多采用电机或者气缸进行驱动,其夹持力度不好调节,有时候会产生夹持力度过重的情况,当在对较为柔软或者易碎的产品进行夹持时,极为容易损坏被夹持的包装物,因此需要对其进行改进。
技术实现要素:
4.针对背景技术中提到的问题,本实用新型的目的是提供一种柔性机械手,以解决现有的机械手其在抓取功能上存在不足,其夹持端部与物品的接触面的摩擦力较小,尤其是圆形或圆柱形物体,在夹取过程中,经常会发生物品脱落的现象,并且使用期间,多采用电机或者气缸进行驱动,其夹持力度不好调节,有时候会产生夹持力度过重的情况,当在对较为柔软或者易碎的产品进行夹持时,极为容易损坏被夹持的包装物的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
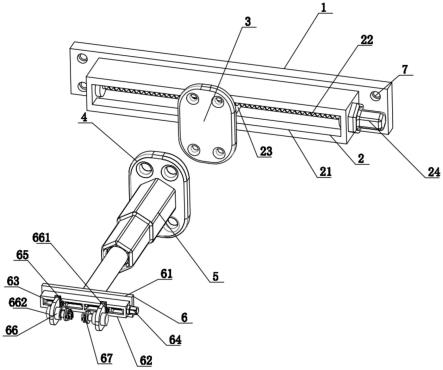
6.一种柔性机械手,包括吊接板,所述吊接板的底部固定安装有位移机构,所述位移机构的底部固定安装有安装板,所述安装板的底部通过螺栓安装有连接板,所述连接板的底部固定安装有伸缩气缸,所述伸缩气缸的底部固定安装有夹持机构;
7.所述夹持机构包括基板,所述基板固定安装于伸缩气缸的底部输出端,所述基板的底部固定安装有第一导轨,所述第一导轨的内侧转动连接有第一丝杆,所述第一丝杆的两端螺纹旋向相反,所述第一导轨的右侧固定安装有第一电机,所述第一电机的输出端与第一丝杆的右端固定连接,所述第一丝杆的两端均螺纹连接有第一滑块,所述第一滑块滑动连接于导轨的内侧,所述第一滑块的底部均固定安装有柔性组件,所述柔性组件的内侧转动连接有夹持组件。
8.进一步地,作为优选技术方案,所述吊接板、安装板和连接板的四拐角处均开设有通孔,所述通孔贯穿吊接板、安装板和连接板,所述连接板上的通孔内设有螺栓,所述连接板通过螺栓与安装板的连接。
9.进一步地,作为优选技术方案,所述位移机构包括第二导轨,所述第二导轨固定安
装于吊接板的底部,所述第二导轨的内侧转动连接有第二丝杆,所述第二导轨的右侧固定安装有第二电机,所述第二电机的输出端与第二丝杆的右端固定连接,所述第二丝杆的外表面螺纹连接有第二滑块,所述第二滑块滑动连接于第二导轨的内侧,所述第二滑块的底部与安装板的顶部固定连接。
10.进一步地,作为优选技术方案,所述第二导轨和第一导轨的内侧侧面形状均为凸字形,所述第一滑块和第二滑块的侧面形状也均设置为凸字形。
11.进一步地,作为优选技术方案,所述柔性组件包括支轴,所述支轴固定安装于第一滑块的底部,所述支轴的底部固定安装有底板,所述底板的下端固定安装有套筒,所述套筒贯穿底板,所述套筒内侧固定安装有伸缩弹簧,所述伸缩弹簧的内侧固定安装有夹持座,所述夹持座的外端滑动连接于套筒的内部。
12.进一步地,作为优选技术方案,所述底板的下端侧面形状为弧形,所述底板的侧面形状为t字形,所述夹持座的侧面形状设置为凸字形。
13.进一步地,作为优选技术方案,所述夹持组件包括压力传感器,所述压力传感器转动连接于夹持座的内侧,所述压力传感器检测端内侧固定安装有夹板。
14.进一步地,作为优选技术方案,所述夹板的中间开设有三角凹槽,所述三角凹槽的正面形状为等腰三角形,所述三角凹槽的内部均等间距固定安装有防滑块。
15.进一步地,作为优选技术方案,所述压力传感器的前后两端均螺纹连接有手拧螺栓,所述手拧螺栓的外端贯穿压力传感器的前后两端与夹持座的内侧贴合连接。
16.综上所述,本实用新型主要具有以下有益效果:
17.第一、通过设置位移机构,使得在使用时,可通过启动第二电机驱动第二丝杆在第二导轨内侧转动,即可通过丝杆驱动第二滑块在第二导轨内侧滑动,从而驱动滑块带动伸缩气缸位移,进而使得在夹持后,可通过启动第二电机的正转和反转带动所夹持的包装物左右移动,方便机械手使用;
18.第二、通过设置夹持机构,使得在使用期间,可将本机械手与自动化生产线的设备相配合,将本设备安装到生产线上,此时通过自动化生产线上设备的红外线定位传感器进行精准定位,使用期间,通过启动第二电机带动伸缩气缸位移,此时通过启动伸缩气缸带动夹持机构下移,此时当所需夹持的产品位于夹持座的内侧时,通过启动第一电机带动第一丝杆转动,通过第一丝杆驱动滑块相互滑动,通过滑块相互滑动,即可带动底板相互滑动,从而通过底板带动夹持座向内侧移动,通过夹持座内侧压力传感器内端的夹板对所需夹持的产品进行夹持即可,此时压力传感器传感夹持时所产生的压力,避免夹持力度过高而导致产品损坏,并且采用了套筒内部的伸缩弹簧,可对夹持座进行较好的缓冲,从而避免瞬间压力过高导致夹持产品损坏,使得本机械手具有较好的柔性,提高了本机械手的使用方便;
19.第三、使用期间,通过设置转动连接的压力传感其和夹板相配合,使得在使用时,可通过转动压力传感器,即可调节夹板内侧的三角凹槽横向或者纵向,从而便于调节三角凹槽的方位于角度,此时便可通过转动手拧螺栓辅助固定压力传感器,进而便于针对圆形物体进行夹持,有效的提高了本装置的使用方便性。
附图说明
20.图1是本实用新型的结构示意图;
21.图2是本实用新型的俯视图;
22.图3是本实用新型的柔性组件剖面图;
23.图4是本实用新型的图2的a处放大图。
24.附图标记:1、吊接板,2、位移机构,21、第二导轨,22、第二丝杆, 23、第二滑块,24、第二电机,3、安装板,4、连接板,5、伸缩气缸,6、夹持机构,61、基板,62、第一导轨,63、第一丝杆,64、第一电机,65、第一滑块,66、柔性组件,661、支轴,662、底板,663、套筒,664、伸缩弹簧,665、夹持座,67、夹持组件,671、压力传感器,672、夹板,673、三角凹槽,674、防滑块,675、手拧螺栓,7、通孔。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例1
27.参考图1-3,本实施例所述的一种柔性机械手,包括吊接板1,吊接板 1的底部固定安装有位移机构2,位移机构2的底部固定安装有安装板3,安装板3的底部通过螺栓安装有连接板4,连接板4的底部固定安装有伸缩气缸5,伸缩气缸5的底部固定安装有夹持机构6;
28.夹持机构6包括基板61,基板61固定安装于伸缩气缸5的底部输出端,基板61的底部固定安装有第一导轨62,第一导轨62的内侧转动连接有第一丝杆63,第一丝杆63的两端螺纹旋向相反,第一导轨62的右侧固定安装有第一电机64,第一电机64的输出端与第一丝杆63的右端固定连接,第一丝杆63的两端均螺纹连接有第一滑块65,第一滑块65滑动连接于导轨的内侧,第一滑块65的底部均固定安装有柔性组件66,柔性组件66的内侧转动连接有夹持组件67。
29.实施例2
30.参考图1-3,在实施例1的基础上,为了达到提高本装置使用方便性的目的,本实施例对吊接板1、安装板3、位移机构2和连接板4进行了创新设计,具体地,吊接板1、安装板3和连接板4的四拐角处均开设有通孔 7,通孔7贯穿吊接板1、安装板3和连接板4,连接板4上的通孔7内设有螺栓,连接板4通过螺栓与安装板3的连接,位移机构2包括第二导轨21,第二导轨21固定安装于吊接板1的底部,第二导轨21的内侧转动连接有第二丝杆22,第二导轨21的右侧固定安装有第二电机24,第二电机24的输出端与第二丝杆22的右端固定连接,第二丝杆22的外表面螺纹连接有第二滑块23,第二滑块23滑动连接于第二导轨21的内侧,第二滑块23的底部与安装板3的顶部固定连接,第二导轨21和第一导轨62的内侧侧面形状均为凸字形,第一滑块65和第二滑块23的侧面形状也均设置为凸字形;通过设置安装板3、连接板4和吊接板1上的通孔7,可便于通过螺栓安装吊接本机械手,方便使用,通过设置位移机构2,使得在使用时,可通过启动第二丝杆22带动第二导轨21内侧的第二丝杆22驱动第二滑块23滑动,进而带动伸缩气缸5移动,方便夹持位移,通过设置凸字形的第一滑块65、第二滑块23、第一导轨62和第二导轨21,可提高第一滑块65和第二滑块23在第一导轨62和第二导轨21内滑动的稳定性。
31.实施例3
32.参考图1-4,本实施例在实施例2的基础上,为了达到进一步提高本装置使用稳定性的目的,本实施例对夹持机构6进行了创新设计,具体地,柔性组件66包括支轴661,支轴661固定安装于第一滑块65的底部,支轴 661的底部固定安装有底板662,底板662的下端固定安装有套筒663,套筒 663贯穿底板662,套筒663内侧固定安装有伸缩弹簧664,伸缩弹簧664的内侧固定安装有夹持座665,夹持座665的外端滑动连接于套筒663的内部,底板662的下端侧面形状为弧形,底板662的侧面形状为t字形,夹持座665的侧面形状设置为凸字形,夹持组件67包括压力传感器671,压力传感器671转动连接于夹持座665的内侧,压力传感器671检测端内侧固定安装有夹板672,夹板672的中间开设有三角凹槽673,三角凹槽673的正面形状为等腰三角形,三角凹槽673的内部均等间距固定安装有防滑块674,压力传感器671的前后两端均螺纹连接有手拧螺栓675,手拧螺栓675的外端贯穿压力传感器671的前后两端与夹持座665的内侧贴合连接;通过设置柔性组件66,可通过套筒663内部的伸缩弹簧664进行缓冲,从而保持夹持座665就有较好的柔性,避免损坏被夹持物,通过设置底板662的下端为弧形侧面为凸字形,可便于辅助安装套筒663,方便使用,通过设置压力传感器671,可通过压力传感器671进行压力检测,从而避免夹持压力过大,而设置夹板672,可提高夹持稳定性,设置三角形的三角凹槽673,可便于对圆形的产品进行夹持,而设置防滑块674,可进一步提高夹持的稳定性,通过设置手拧螺栓675,可便于固定压力传感器671的方位,从而便于固定三角凹槽673的方向,方便使用。
33.使用原理及优点:在使用时,通过转动压力传感器671,即可调节夹板 672内侧的三角凹槽673横向或者纵向,从而便于调节三角凹槽673的方位于角度,此时便可通过转动手拧螺栓675辅助固定压力传感器671,进而便于针对圆形物体进行夹持,使用期间,将本设备安装到生产线上,此时通过自动化生产线上设备的红外线定位传感器进行精准定位,使用期间,通过启动第二电机24带动伸缩气缸5位移,此时通过启动伸缩气缸5带动夹持机构6下移,此时当所需夹持的产品位于夹持座665的内侧时,通过启动第一电机64带动第一丝杆63转动,通过第一丝杆63驱动滑块相互滑动,通过滑块相互滑动,即可带动底板662相互滑动,从而通过底板662带动夹持座 665向内侧移动,通过夹持座665内侧压力传感器671内端的夹板672对所需夹持的产品进行夹持即可,此时压力传感器671传感夹持时所产生的压力,避免夹持力度过高而导致产品损坏,并且采用了套筒663内部的伸缩弹簧664,可对夹持座665进行较好的缓冲,从而避免瞬间压力过高导致夹持产品损坏,使得本机械手具有较好的柔性,提高了本机械手的使用方便,通过启动第二电机24驱动第二丝杆22在第二导轨21内侧转动,即可通过丝杆驱动第二滑块23在第二导轨21内侧滑动,从而驱动滑块带动伸缩气缸5 位移,进而使得在夹持后,可通过启动第二电机24的正转和反转带动所夹持的包装物左右移动,当达到移动的位置后,启动伸缩气缸5下移,第一电机64反转,即可将被夹持物体放下,方便机械手使用。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1