一种小型塔式智能搬运车
1.本实用新型属于物料搬运技术领域,具体涉及一种小型塔式智能搬运车。
背景技术:
2.搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,液压电压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。但是,现有的大多数搬运机器人均不具有对货物进行颜色形状识别且位置距离测量的能力,需要装载机械配合对其进行装卸,使运载成本提高,而卸货的效率降低。
3.现在的搬运机器人在部分复杂的工作环境中,无法正常的行进与工作,也不能满足机器物体识别与测距的功能,上部抓取杆的转动精度不够精确导致无法正常的抓取货物以及卸载放入指定区域,且需要对货物进行装载机械对货物装载,庞大的机身使其不具有广泛的适用性,整体运行成本昂贵,并且效率低下,不利于提高货物的搬运效率。
技术实现要素:
4.针对上述现有技术中存在的缺陷或不足,本实用新型的目的在于,提供一种可实现超复杂环境内准确抓取物料功能的小型塔式智能搬运车。
5.为了实现上述任务,本实用新型采用如下的技术解决方案:
6.一种小型塔式智能搬运车,包括车架,其特征在于,在车架上设置有底盘行进机构单元、智能控制单元和用于夹持抓取物料的抓放机构单元;其中:
7.所述底盘行进机构单元包括:设置在车架下方的底盘,在底盘四角设置的麦克纳姆轮,麦克纳姆轮通过轴承与直流电机相连接,直流电机安装在底盘的内腔顶部,底盘的内腔四角均设置有输出端,所述输出端分别对应于麦克纳姆轮固接的直流电机,直流电机通过轴承带动麦克纳姆轮以不同转速进行方向控制;在底盘四周中央对称设置有4个灰度传感器;在底盘一侧以及底盘一侧上方的连杆上,分别设置两个方向相互正交的激光或超声波测距传感器;
8.所述抓放机构单元包括:设置在车架中央的电动转台,在电动转台底部连接有第一舵机,第一舵机上端连接有步进电机;电动转台上方一侧通过一对旋转杆连接升降杆,在旋转杆与升降杆的连接处设置有同步带轮,在升降杆上有摄像头,在升降杆下方连接有第二舵机,第二舵机通过机械爪保护外壳连接第三舵机,第三舵机与机械爪相连接;在电动转台上靠近旋转杆一侧还设置有万向球;
9.所述智能控制单元为在底盘内腔底部安装的控制电路板,控制电路板上的元器件包括视觉模块、驱动电路板、单片机和扩展电路板;其中:
10.驱动电路板为两个二路电机驱动电路板,可通过驱动直流电机对四个麦克纳姆轮进行控制;
11.扩展电路板为灰度传感器和超声传感器提供足够的电源接口,并将相关的单片机io口单独引出方便连线;
12.视觉模块用于接收摄像头识别货物特征信息形成的电信号,并进行数据处理后将数据传输给单片机,单片机对数据进行有效分析后,将操作命令传输给驱动电路板和扩展电路板,由驱动电路板和扩展电路板对直流电机、电动转台、第一舵机、第二舵机、第三舵机、机械爪进行控制,使得机械爪夹取货物,并随着麦克纳姆轮的滚动,将货物运输至指定位置;
13.到达指定位置后,视觉模块将信息传递至单片机,单片机发出驱动步进电机指令,使步进电机带动升降杆向下运动,降低高度,到达指定高度后,机械爪由第三舵机带动向外转动,放置物品,动作完成。
14.本实用新型的其它特点是:
15.所述单片机采用arduino mega 2560单片机。
16.所述视觉模块采用openmv4cam h7plus ov5640视觉模块。
17.所述麦克纳姆轮为全向轮。
18.所述智能控制单元还包括外接电源,外接电源分别与驱动电路板、单片机和扩展电路板相连接。
19.所述摄像头采用openmv摄像头。
20.本实用新型的小型塔式智能搬运车,与现有技术相比,至少具有以下有益效果:
21.采用麦克纳姆轮负责小型塔式智能搬运车的运动,电动转台负责将抓放机构旋转至需搬运的物料的正上方,再通过步进电机与机械爪将物料抓起至合适位置,智能控制单元通过传感器采集信息经单片机分析处理后控制机械爪的第二舵机和机械爪的第一舵机实现上述功能,在控制电动转台运动将旋转杆旋转至合适角度,从而带动底盘行进机构单元运动,此装置不需要改变机身位置来控制前进方向,极大地简便搬运过程,提高搬运物料的效率,且机身小、重量轻的特点使其有极强的环境适应性。
22.抓放机构单元用于在复杂环境中准确抓取货物,且到达指定位置后平稳放置。
23.通过控制第三舵机可以实现旋转杆上的物料在任意适当角度平稳悬停。
24.通过设置的摄像头能够图片采集货物信息,实现抓放机构单元精准夹取操作。
25.智能控制单元的视觉模块通过灰度传感器采集货物的信息,经单片机分析处理后控制抓取机构单元上的机械爪上的第一舵机与第二舵机实现抓取及旋转的功能。
26.设置外接电源能够为搬运车及各控制模块提供持续的稳定动力支持。
27.由于机身的特殊性,车身前进只需要控制旋转杆合适位置即可,车架四角的麦克纳姆轮在通过智能控制单元信息处理也能实现在狭小空间前进。
附图说明
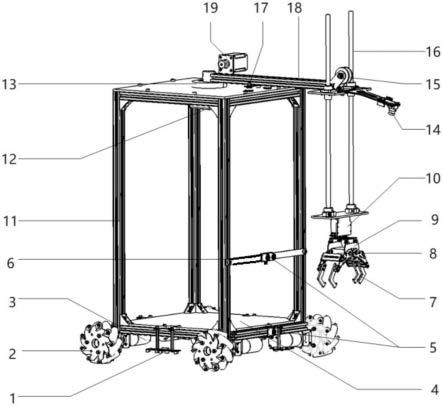
28.图1为本实用新型的小型塔式智能搬运车结构示意图;
29.图2为图1的侧视结构示意图;
30.图3为图1的俯视结构示意图;
31.图4为底盘行进机构单元结构示意图;
32.图5为底盘行进机构单元仰视结构示意图;
33.图6为本抓放机构单元结构示意图。
34.图7为智能控制单元的内部结构示意图;
35.图中的标记分别表示:1、灰度传感器,2、麦克纳姆轮,3、直流电机,4、底盘,5、超声波传感器,6、连杆,7、机械爪,8、第三舵机,9、机械爪保护外壳,10、第二舵机,11、车架,12、第一舵机,13、电动转台,14、openmv摄像头,15、同步带轮,16、升降杆,17、万向球,18、旋转杆,19、步进电机。
36.以下结合附图和实施例对本实用新型作进一步地详细说明。
具体实施方式
37.在以下的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“一侧”、“一端”、“一边”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.需要说明的是,在以下的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
39.请参阅图1、图2、图3和图4,本实施例给出一种小型塔式智能搬运车,包括车架11,在车架11上设置有底盘行进机构单元、智能控制单元和用于夹持抓取物料的抓放机构单元;其中:
40.所述底盘行进机构单元包括:设置在车架11下方的底盘4,在底盘4四角设置的麦克纳姆轮2,麦克纳姆轮2通过轴承与直流电机3相连接,直流电机3安装在底盘4的内腔顶部,底盘4的内腔四角均设置有输出端,所述输出端分别对应于麦克纳姆轮2固接的直流电机3,直流电机3通过轴承带动麦克纳姆轮2以不同转速进行方向控制;麦克纳姆轮2有利于在狭小的空间内实现转向功能。
41.在底盘4四周中央对称设置有4个灰度传感器1,用于获取货物的信息;
42.在底盘4一侧以及底盘4一侧上方的连杆6上,分别设置两个方向相互正交的激光或超声波测距传感器5;用于对前方测距以及测量取物区及停放地的距离;
43.所述抓放机构单元包括:设置在车架11中央的电动转台13,在电动转台13底部连接有第一舵机12,第一舵机12上端连接有步进电机19;电动转台13上方一侧通过一对旋转杆18连接升降杆16,在旋转杆18与升降杆16的连接处设置有同步带轮15,在升降杆16上有摄像头14,在升降杆16下方连接有第二舵机10,第二舵机10通过机械爪保护外壳9连接第三舵机8,第三舵机8与机械爪7相连接;在电动转台13上靠近旋转杆18一侧还设置有万向球17;
44.参见图7,本实施例中,所述智能控制单元为在底盘4内腔底部安装的控制电路板,控制电路板上的元器件包括视觉模块、驱动电路板、单片机和扩展电路板;其中:
45.驱动电路板为两个二路电机驱动电路板,可通过驱动直流电机3对麦克纳姆轮2进行控制;由于单片机的io接口功率太小,不足以直接驱动直流电机3运转,故需要采用驱动电路板间接的驱动直流电机3运转并对直流电机3的运转状态加以控制。
46.驱动电路板由电源模块供电,单片机输出两个二路占空比可调的pwm给驱动模块,实现单片机驱动直流电机3对麦克纳姆轮2的转速以及正反转的控制。
47.扩展电路板为灰度传感器和超声传感器提供足够的电源接口,并将相关的单片机io口单独引出方便连线;
48.直流电机3、电动转台13、第二舵机10、第三舵机8、超声波传感器5、步进电机19和openmv摄像头14均通过控制电路板与外接电源电性连接,第一舵机12单独与外接电源连接,再与控制电路板接地,由控制电路板控制。
49.视觉模块用于接收摄像头14识别货物特征信息形成的电信号,并进行数据处理后将数据传输给单片机,单片机中的程序可对数据进行有效分析后,将操作命令传输给驱动电路板和扩展电路板,由驱动电路板和扩展电路板对直流电机3、电动转台13的第一舵机12、第二舵机10、第三舵机8、机械爪7进行控制,使得机械爪7夹取货物,并随着麦克纳姆轮2的滚动,将货物运输至指定位置;
50.到达指定位置后,视觉模块将信息传递至单片机,单片机发出驱动步进电机19指令,使步进电机19带动升降杆16向下运动,降低高度,到达指定高度后,机械爪7由第三舵机8舵机带动向外转动,放置物品,动作完成。
51.本实施例中,所述单片机采用arduino mega 2560单片机。该arduino mega 2560单片机是基于atmega2560的主控开发板。采用usb接口的核心电路板。具有54路数字输入输出,适合需要大量io接口的设计。处理器核心是atmega2560,同时具有54路数字输入/输出口,16路模拟输入,4路uart接口,一个16mhz晶体振荡器,一个usb口,一个电源插座,一个icsp header和一个复位按钮。板上有支持一个主控板的所有资源。arduino mega2560也能兼容为arduino nuo设计的扩展板。可以自动选择3中供电方式:外部直流电源通过电源插座供电;电池连接电源连接器的gnd和vin引脚;usb接口直流供电。
52.arduino mega2560单片机上的atmega2560已经预置了bootloader程序,因此可以通过arduino软件直接下载程序到mega2560中。可以直接通过mega2560上icsp header直接下载程序到atmega2560。atmega16u2的firmware(固件)也可以通过dfu工具升级。
53.所述视觉模块采用openmv4cam h7plus ov5640视觉模块。
54.所述麦克纳姆轮2为全向轮。
55.所述智能控制单元还包括外接电源,外接电源分别与驱动电路板、单片机和扩展电路板相连接。
56.所述摄像头14采用openmv摄像头。
57.本实施例的小型塔式智能搬运车的设计思路是,智能控制单元设置在底盘行进机构单元上,用于控制抓取机构单元实现抓取、旋转,以及底盘行进机构单元的运动。
58.抓放机构单元的电动转台13与车架11顶部相连接,电动转台13上连接步进电机19,抓放机构单元通过步进电机19控制升降杆16上下移动带动物料,底盘行进机构单元与
车架11底部相连接,底盘行进机构单元通过直流电机3控制麦克纳姆轮2不同转速进行方向控制。
59.智能控制单元设置在底盘行进机构单元上,分别与底盘行进机构单元、抓放机构单元连接,通过灰度传感器与openmv摄像头14将采集到的货物信息传递至控制电路板的视觉模块,经分析并反馈至智能控制单元的arduino mega 2560单片机,由arduino mega 2560单片机对抓放机构单元的机械爪7需要抓取的货物进行图像识别、处理、传输,以不同舵机的工作来控制机械爪7抓取货物和放置。
60.openmv摄像头与设置在车架底盘上的视觉模块电连接,通过视觉模块与智能控制单元的arduino mega 2560单片机连接。
61.在底盘4一侧以及底盘4一侧上方的连杆6上,分别设置两个方向相互正交的激光或超声波测距传感器5,激光或超声波测距传感器5通过视觉模块与智能控制单元的arduino mega 2560单片机连接。
62.arduino mega 2560单片机为主要控制器,控制驱动电路板与直流电机3相连接,从而带动麦克纳姆轮2前进、后退以及横向移动。
63.请参阅图5,底盘行进机构单元底部的直流电机3上自带编码器,利用pid算法实现自动调速,控制麦克纳姆轮2自动向各个方向直行。
64.请参阅图6,底盘抓放机构单元包括电动转台13、第一舵机12、第二舵机10、第三舵机8、机械爪7、同步带轮15、升降杆16、旋转杆18、步进电机19、电动转台13以及openmv摄像头14,第一舵机12设置在电动转台13的中心,上端与步进电机19、旋转杆18相连接,在旋转杆18上安装同步带轮15,其高度与步进电机19中心水平,再安装升降杆16,其下端连接机械爪7;还包括控制机械爪7闭合/张开的第一舵机12,180
°
自由旋转的第二舵机10和第三舵机8,在升降杆16上部配有openmv摄像头14,并与智能控制单元的arduino mega 2560单片机连接。
65.本实施例中,所述的openmv4cam h7plus ov5640视觉模块是一款低成本,功能强大的机器视觉模块。以stm32f427cpu为核心,集成了ov5640摄像头芯片,在小巧的硬件模块上,用c语言高效地实现了核心机器视觉算法,提供python编程接口,通过python语言对openmv摄像头进行编程,实现对于特定目标的快速识别,并通过openmv摄像头自带的串口与arduino mega 2560单片机连接,实现串口通信,将识别到特定目标的目标特征发送给单片机由单片机进行判断从而采取后续操作。
66.视觉模块的程序段如下:
67.68.[0069][0070]
扩展电路板为灰度传感器和超声传感器提供足够的电源接口,并将相关的单片机io口单独引出方便连线。
[0071]
本实施例采用arduino mega 2560单片机,为设备提供足够的io接口。
[0072]
麦克纳姆轮2的转轴与底盘4的连接处通过轴承转动连接,使得麦克纳姆轮2转动更加顺畅。
[0073]
本实施例的小型塔式智能搬运车,主要适用于对货物进行搬运,使用时,通过摄openmv摄像头14识别货物特征信息形成电信号,视觉模块接收电信号,并对其进行数据处理后将数据传输给arduino单片机,arduino单片机中的程序可对数据进行有效分析后,将操作命令传输给驱动电路板和扩展电路板,驱动电路板和扩展电路板再对直流电机3、电动转台13、第一舵机12、第二舵机10、第三舵机8、机械爪7进行控制,使得机械爪7夹取货物,并随着麦克纳姆轮2的滚动,将货物运输至指定地点,具体过程如下:
[0074]
当小型塔式智能搬运车运动至指定区域,此时激光或超声波测距传感器对前方测距,若无物品,则自动换位至下一地点;若前方出现货物,则进行以下操作;
[0075]
视觉模块扫描物品信息,并检测周围环境及定位,将信息传递至arduino mega 2560单片机;
[0076]
通过不同的货物信息,arduino mega 2560单片机根据接收的信息驱动电路板驱动抓取机构单元中机械爪7的第二舵机10和第三舵机8转动,电动转台13的第一舵机12将旋转杆18转至货物正上方,达到指定高度,机械爪7和第二舵机10根据货物的摆放情况,自动将机械爪7旋转至合适位置,再控制第三舵机8以达到抓取物品的目的。
[0077]
抓取完货物之后,电动转台13的第一舵机12自动将旋转杆18转至向堆放区的前进
道路方向。
[0078]
到达指定位置后,视觉模块确定物料放置地点后,同样将信息传递至arduino mega 2560单片机,arduino mega 2560单片机驱动步进电机19,使步进电机19带动升降杆16向下运动,降低高度,到达指定高度后,机械爪的第三舵机8舵机向外转动,放置物品,动作完成。
[0079]
主要控制程序段如下:
[0080]
[0081]
[0082]
[0083]
[0084]
[0085]
[0086]
[0087]
[0088]
[0089]
[0090][0091]
综上所述,本实施例的小型塔式智能搬运车,其结构简单,使用方便,适用于对货物进行搬运,通过抓取装置,可直接对货物进行抓取搬运,所装载物料不会脱爪,并且满足机器人自主识别物料信息的功能,满足复杂工作环境,准确抓取货物,可进入复杂区域工作,不需要装载机械进行配合工作,这样将有效提高货物搬运的效率,降低货物的运输成本。
[0092]
以上内容仅为说明本实用新型的技术方案,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术方案案基础上所做的添加或替换,均属于本实用新型权利要求书所限定的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1