一种写字机器人抬笔部件的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种写字机器人抬笔部件。
背景技术:
2.随着技术的发展,机器人开始代替人类的部分劳动,例如随着人工智能教学的发展,教学机器人开始产生。但相关技术中机器人夹持装置还仅停留在简单的仿生装置,很难做到像人类手执笔时的状态,例如握笔写字或画画时手持笔的状态。现有通常使用的笔上不存在专门为了机械连接而预留的定位结构,所以笔在安装时不能保证每次都能精确的安装到一个确定的位置;且写字过程中要保证笔对纸张有一定的压力,并且压力不能波动太大(参考人写字时笔的状态),因此如何设计出仿生人体手部功能的夹持笔的夹持装置成为本技术领域人员亟待研究的课题。
技术实现要素:
3.本实用新型的目的在于提供一种写字机器人抬笔部件,解决了上述提到的技术问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种写字机器人抬笔部件,包括滑车本体,所述滑车本体前端固定安装有滑轨,所述滑轨表面滑动卡接有限位滑块,所述滑车本体的下端螺栓固定安装有限位杆,所述限位滑块表面设置有悬臂安装板,所述限位滑块表面还设置有用于固定悬臂安装板的螺丝,所述滑车本体前端表面固定安装有电机,所述电机的输出轴表面套接有同步轮,所述同步轮表面设有用于驱动悬臂安装板的抬笔皮带,所述悬臂安装板表面设置有书写笔,所述电机远离所述输出轴的一端通过螺栓固定安装在滑车本体表面。
5.优选的,所述悬臂安装板表面开设有连接孔、弧形调节槽、转动孔以及弧形槽,所述弧形槽内部贯穿滑动安装有夹笔钩,所述夹笔钩表面螺纹套接有限位螺帽,所述悬臂安装板表面贴合有笔架,所述笔架表面对称固定安装有螺栓,所述笔架通过分别贯穿滑动安装在转动孔和弧形调节槽内部的两个螺栓安装在悬臂安装板表面,两个所述螺栓表面均配套设置有螺帽,所述笔架背端的凹陷处贴合有书写笔,所述书写笔表面同时贴合在夹笔钩的背端弯曲处。
6.优选的,所述连接孔内部与抬笔皮带端部固定卡接,所述同步轮表面设置有用于与电机的输出轴紧密配合的顶丝,所述同步轮表面螺纹安装有压片,所述压片与同步轮之间的缝隙用于夹紧抬笔皮带的另一端。
7.优选的,所述滑车本体下端表面螺纹安装有限位杆,所述限位杆与螺丝之间设置有缓冲弹簧,所述缓冲弹簧的两端分别套接在限位杆与螺丝表面。
8.优选的,所述悬臂安装板表面开设有安装孔,所述螺丝表面贯穿安装孔内部与限位滑块螺纹安装在一起。
9.与相关技术相比较,本实用新型提供的一种写字机器人抬笔部件具有如下有益效
果:
10.本实用新型提供一种写字机器人抬笔部件,通过控制电机启动使其输出轴带动同步轮转动,从而带动由压片夹紧的抬笔皮带带动悬臂安装板运动完成书写笔的抬笔落笔动作,过程中限位滑块在滑轨表面竖直滑动,并将电机固定安装在滑车本体的前端与滑车本体后端的驱动单元大致对称,使得装置在移动过程中更加稳定,有效的避免了装置使用过程中因重心不稳导致晃动书写效果差的现象出现,并由限位杆与螺丝之间设置的缓冲弹簧使得书写笔在进行抬落笔操作时能够得到缓冲,进一步的提高了装置的稳定性。
11.本实用新型提供一种写字机器人抬笔部件,采用悬臂安装板表面开设的、转动孔以及抬笔皮带,使得书写笔在进行安装时,以转动孔内部的螺栓为圆心对弧形调节槽内部的螺栓进行位置调节从而实现笔架的角度调整,过程中夹笔钩表面在弧形槽内部随动,然后通过拧紧螺栓表面配套设置的螺帽完成笔架与悬臂安装板的紧密配合,然后根据不同规格的书写笔来拧紧限位螺帽,从而带动夹笔钩的弯曲处与笔架的凹陷处共同夹紧书写笔完成安装,有效的提高了装置适应性,并能够根据螺栓在弧形调节槽内部位置的改变来调节书写笔的角度,使得装置在进行书写时更加符合人体工学,更加贴合人体手部夹持笔的状态,更加实用。
附图说明
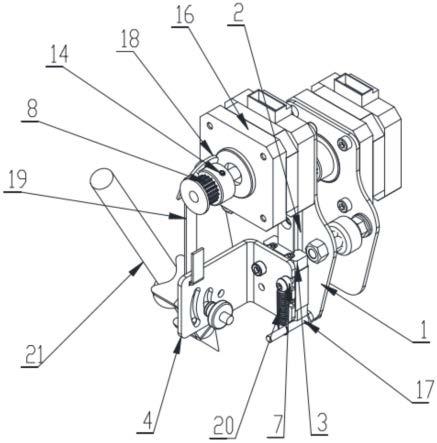
12.图1为本实用新型的整体结构示意图;
13.图2为本实用新型的悬臂安装板结构示意图;
14.图3为本实用新型的笔架结构示意图;
15.图4为本实用新型的弧形槽结构示意图。
16.图中:1、滑车本体,14、顶丝,16、电机,17、限位杆,18、压片,19、抬笔皮带,2、滑轨,21、书写笔,20、缓冲弹簧,4、悬臂安装板,41、连接孔,42、夹笔钩,43、弧形调节槽,44、限位螺帽,45、笔架,47、安装孔,48、转动孔,49、弧形槽,3、限位滑块,7、螺丝,8、同步轮。
具体实施方式
17.实施例一:
18.请参阅图1-图2,本实用新型提供一种技术方案,包括滑车本体1,滑车本体1前端固定安装有滑轨2,滑轨2表面滑动卡接有限位滑块3,滑车本体1的下端螺栓固定安装有限位杆17,限位滑块3表面设置有悬臂安装板4,限位滑块3表面还设置有用于固定悬臂安装板4的螺丝7,滑车本体1前端表面固定安装有电机16,电机16的输出轴表面套接有同步轮8,同步轮8表面设有用于驱动悬臂安装板4的抬笔皮带19,悬臂安装板4表面设置有书写笔21,电机16远离所述输出轴的一端通过螺栓固定安装在滑车本体1表面,连接孔41内部与抬笔皮带19端部固定卡接,同步轮8表面设置有用于与电机16的输出轴紧密配合的顶丝14,同步轮8表面螺纹安装有压片18,压片18与同步轮8之间的缝隙用于夹紧抬笔皮带19的另一端,滑车本体1下端表面螺纹安装有限位杆17,限位杆17与螺丝7之间设置有缓冲弹簧20,缓冲弹簧20的两端分别套接在限位杆17与螺丝7表面,悬臂安装板4表面开设有安装孔47,螺丝7表面贯穿安装孔47内部与限位滑块3螺纹安装在一起。
19.本实施例中:通过控制电机16启动使其输出轴带动同步轮8转动,从而带动由压片
18夹紧的抬笔皮带19带动悬臂安装板4运动完成书写笔21的抬笔落笔动作,过程中限位滑块3在滑轨2表面竖直滑动,并将电机16固定安装在滑车本体1的前端与滑车本体1后端的驱动单元大致对称,使得装置在移动过程中更加稳定,有效的避免了装置使用过程中因重心不稳导致晃动书写效果差的现象出现,并由限位杆17与螺丝7之间设置的缓冲弹簧20使得书写笔21在进行抬落笔操作时能够得到缓冲,进一步的提高了装置的稳定性。
20.实施例二:
21.请参阅图3-图4,在实施例一的基础上,本实用新型提供一种技术方案:悬臂安装板4表面开设有连接孔41、弧形调节槽43、转动孔48以及弧形槽49,弧形槽49内部贯穿滑动安装有夹笔钩42,夹笔钩42表面螺纹套接有限位螺帽44,悬臂安装板4表面贴合有笔架45,笔架45表面对称固定安装有螺栓,笔架45通过分别贯穿滑动安装在转动孔48和弧形调节槽43内部的两个螺栓安装在悬臂安装板4表面,两个螺栓表面均配套设置有螺帽,笔架45背端的凹陷处贴合有书写笔21,书写笔21表面同时贴合在夹笔钩42的背端弯曲处。
22.本实施例中:采用悬臂安装板4表面开设的13、转动孔48以及抬笔皮带19,使得书写笔21在进行安装时,以转动孔48内部的螺栓为圆心对弧形调节槽43内部的螺栓进行位置调节从而实现笔架45的角度调整,过程中夹笔钩42表面在弧形槽49内部随动,然后通过拧紧螺栓表面配套设置的螺帽完成笔架45与悬臂安装板4的紧密配合,然后根据不同规格的书写笔21来拧紧限位螺帽44,从而带动夹笔钩42的弯曲处与笔架45的凹陷处共同夹紧书写笔21完成安装,有效的提高了装置适应性,并能够根据螺栓在弧形调节槽43内部位置的改变来调节书写笔21的角度,使得装置在进行书写时更加符合人体工学,更加贴合人体手部夹持笔的状态,更加实用。
23.工作原理:通过控制电机16启动使其输出轴带动同步轮8转动,从而带动由压片18夹紧的抬笔皮带19带动悬臂安装板4运动完成书写笔21的抬笔落笔动作,过程中限位滑块3在滑轨2表面竖直滑动,并将电机16固定安装在滑车本体1的前端与滑车本体1后端的驱动单元大致对称,使得装置在移动过程中更加稳定,有效的避免了装置使用过程中因重心不稳导致晃动书写效果差的现象出现,并由限位杆17与螺丝7之间设置的缓冲弹簧20使得书写笔21在进行抬落笔操作时能够得到缓冲,进一步的提高了装置的稳定性,采用悬臂安装板4表面开设的13、转动孔48以及抬笔皮带19,使得书写笔21在进行安装时,以转动孔48内部的螺栓为圆心对弧形调节槽43内部的螺栓进行位置调节从而实现笔架45的角度调整,过程中夹笔钩42表面在弧形槽49内部随动,然后通过拧紧螺栓表面配套设置的螺帽完成笔架45与悬臂安装板4的紧密配合,然后根据不同规格的书写笔21来拧紧限位螺帽44,从而带动夹笔钩42的弯曲处与笔架45的凹陷处共同夹紧书写笔21完成安装,有效的提高了装置适应性,并能够根据螺栓在弧形调节槽43内部位置的改变来调节书写笔21的角度,使得装置在进行书写时更加符合人体工学,更加贴合人体手部夹持笔的状态,更加实用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1