一种三爪机械手的制作方法
1.本实用新型涉及一种机械手,尤其是一种三爪机械手。
背景技术:
2.现有的三爪机械手通常只能实现简单的抓取,当需要旋转时,需要通过安装在移动装置上的旋转装置进行旋转,结构复杂,使用不方便,适用范围较小。
技术实现要素:
3.为解决上述问题,本实用新型提供一种既能实现抓取同时能够实现旋转的一种三爪机械手,具体技术方案为:
4.一种三爪机械手,包括:抓手座;升降驱动装置,所述升降驱动装置安装在所述抓手座上;升降轴,所述升降轴与所述升降驱动装置连接;升降座,所述升降座安装在所述抓手座上,所述升降轴活动安装在所述升降座上;抓手盘,所述抓手盘转动安装在所述升降轴上;夹爪,所述夹爪的一端转动安装在所述抓手盘上,所述夹爪沿所述升降轴的轴线环形阵列设置;连杆,所述连杆的两端分别与所述夹爪和所述升降轴转动连接,所述连杆与所述夹爪一一对应;旋转装置,所述旋转装置与所述抓手盘连接;及旋转电机,所述旋转电机与所述旋转装置连接,用于通过所述旋转装置带动所述夹爪转动。
5.优选的,所述升降驱动装置包括:气缸或电动缸,所述气缸或所述电动缸均固定在所述抓手座上,且与所述升降轴连接。
6.进一步的,还包括:调节板,所述调节板安装在所述抓手座上,所述气缸安装在调节板上。
7.优选的,还包括转动装置,所述转动装置包括:轴承,所述轴承分别安装在所述升降座上;转动套,所述转动套安装在所述轴承上,所述抓手盘安装在所述转动套上;及轴套,所述轴套安装在所述转动套上,且与所述升降轴活动连接。
8.进一步的,所述轴承包括:角接触轴承,所述角接触轴承分别安装在所述升降座的两端,且与所述转动套连接;及深沟球轴承,所述深沟球轴承分别安装在所述升降座的两端,且位于所述角接触轴承的一侧,所述深沟球轴承与所述转动套连接。
9.其中,还包括:压盖,所述压盖固定在所述升降座的一端,且位于所述轴承的一侧;所述转动套的一端设有定位环,所述定位环位于所述升降座的另一端,且位于所述轴承的一侧。
10.优选的,还包括:限位套,所述限位套安装在所述转动套的两端,所述轴套安装在所述限位套内;及端盖,所述端盖固定在所述转动套的两端,且位于所述轴套的一端。
11.优选的,所述旋转装置包括:齿环,所述齿环固定在所述抓手盘上;及齿轮,所述齿轮固定在所述旋转电机上,且与所述齿环啮合。
12.优选的,所述抓手座包括:底板,所述旋转电机和所述升降座均安装在所述底板上;侧板,所述侧板对称固定在所述底板的两侧;及顶板,所述顶板固定在所述侧板上,且与
所述底板相对设置,所述升降驱动装置安装在所述顶板上。
13.与现有技术相比本实用新型具有以下有益效果:
14.本实用新型提供的一种三爪机械手集成了旋转装置,既能实现抓取,同时能够实现机械手旋转,结构紧凑、零件少、使用稳定、维护方便。
附图说明
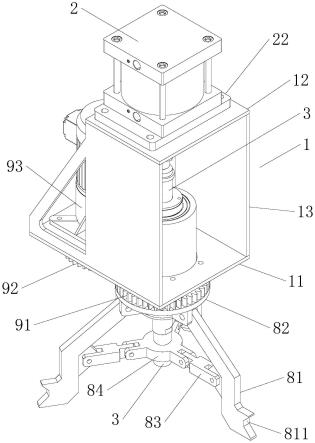
15.图1是一种三爪机械手的结构示意图;
16.图2是一种三爪机械手的正视图;
17.图3是一种三爪机械手的剖视图;
18.图4是一种三爪机械手的仰视图。
具体实施方式
19.现结合附图对本实用新型作进一步说明。
20.如图1至图4所示,一种三爪机械手,包括抓手座1、升降驱动装置、升降轴3、升降座4、抓手盘82、夹爪81、连杆83、转动装置、旋转装置和旋转电机93。
21.抓手座1包括底板11、侧板13和顶板12,底板11与侧板13相对设置,侧板13的两端分别与底板11和顶板12连接,且对称位于底板11和顶板12的两侧。底板11、侧板13和顶板12采用焊接的方式固定在一起。旋转电机93和升降座4均安装在底板11上,且旋转电机93位于升降座4的一侧。抓手座1采用板材加工,成本更低,并且降低了重量。
22.升降驱动装置可以采用气缸2或电动缸,气缸2通过调节板22安装在顶板12上,调节板22用于调整气缸2的活塞杆21伸出长度,进而调整夹爪81的开合大小。
23.升降座4的底部固定在底板11上,升降座4的两端对称设有孔肩。
24.转动装置包括轴承、转动套5、轴套72、限位套71和端盖73。其中,轴承包括角接触轴承61和深沟球轴承62,角接触轴承61分别安装在升降座4的两端,角接触轴承61的外圈抵在孔肩上,内圈与转动套5连接。深沟球轴承62分别安装在升降座4的两端,且位于角接触轴承61的一侧,深沟球轴承62的内圈与转动套5连接,且位于升降座4顶部的深沟球轴承62的内圈还抵在转动套5的定位环51上。升降座4的底部装有压盖41,压盖41位于升降座4底部的深沟球轴承62的一侧,且与深沟球轴承62的外圈相对设置,用于将轴承限制在升降座4内。角接触轴承61能够提高轴线的承载。轴承方便转动套5旋转。抓手盘82通过螺纹与转动套5的另一端连接。转动套5的两端对称设有孔肩,限位套71安装在转动套5的两端,且抵在转动套5的孔肩上。限位套71的底部设限位环,轴套72安装在限位套71内,且一端抵在限位环上。端盖73通过螺钉固定在转动套5上,且位于限位套71和轴套72的端部,用于将限位套71和轴套72固定在转动套5的内部。其中,限位环与端盖73共同防止轴套72沿轴线窜动。升降轴3活动插在轴套72内,轴套72采用自润滑轴承,减少摩擦,既能方便升降轴3升降,同时方便转动套5旋转。
25.旋转装置包括齿环91和齿轮92,齿环91固定在抓手盘82上;齿轮92固定在旋转电机93上,且与齿环91啮合。旋转电机93通过齿轮92和齿环91带动夹爪81旋转,结构紧凑。旋转装置还可以采用同步带轮和同步带的结构。将旋转装置集成到机械手上,方便转动机械手,采用齿轮92和齿环91使结构更加紧凑,并且方便安装、维护,降低维护成本。
26.为了方便连杆83的安装,还包括铰接座84,铰接座84通过螺纹安装在升降轴3的底部,连杆83的一端与夹爪81转动连接,另一端与铰接座84转动连接,铰接座84与夹爪81一一对应,夹爪81的一端转动安装在抓手盘82上。
27.夹爪81根据需要设置夹槽811,夹槽811位于夹爪81的端部,且位于外侧,用于张开时从工件的内圆面夹紧工件。
28.在不影响结构强度以及工作项的前提下,减少冗余零部件,降低机械手生产、装配、维护及维修的难度及成本,减少冗余机械结构,提高设备的可靠性。
29.该结构在保证设备结构强度与工作行的前提下,对外壳结构进行优化,尽可能采用板材切割焊接,减少机加工量及人工成本;
30.工作时,当机械手移动工件的上方时,并且进入到工件的孔后,气缸2的活塞杆21伸出,气缸2推动升降轴3下降,升降轴3通过铰接座84和连杆83带动夹爪81张开,夹槽811卡在工件的孔上,然后机械手上升,并移动到相应的工位处,旋转电机93根据设定的角度,通过齿轮92和齿环91带动工件转动到设定的角度,然后气缸2的活塞杆21缩回,夹爪81在升降轴3的带动下收缩,松开工件。
31.以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,这些方式都将落入本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1