一种粪沟清洗机器人
1.本实用新型涉及清洗机器技术领域,尤其涉及一种用于猪舍粪沟的清洗机器人。
背景技术:
2.规模化养猪,环境控制是关键。猪粪尿清理对于猪舍内的整体卫生情况来说至关重要。目前大型猪场的产仔舍的水泡粪道通常都采用人工清粪,这种方式会有工作环境差,劳动强度大,工作效率低等弊端,对人员安全来说也是一种风险。 为了克服现有技术的不足,我们提出了一种粪沟清洗机器人。
技术实现要素:
3.本实用新型的目的在于提供一种粪沟清洗机器人,以克服现有技术中存在的技术问题。
4.为实现上述技术目的,达到上述技术效果,本实用新型提供如下技术方案:
5.一种粪沟清洗机器人,包括车架,所述车架的底部左右两侧转动连接有传动轴,所述传动轴的端部安装有履带轮,所述车架的顶部连接左侧连接有电池框,所述电池框内设有蓄电池,所述电池框的顶部连接有竖座,所述竖座顶部连接有引水管,所述竖座左侧壁连接有转向电机,所述转向电机的右侧动力输出端连接有锥齿轮,所述车架的顶部中心转动连接有中空轴,所述中空轴上端通过密封轴承转动连接引水管,所述中空轴的外壁上部连接有锥齿圈,所述锥齿圈啮合连接锥齿轮,所述中空轴的下部连通有清洗管,所述车架内壁连接有微控制器。
6.优选的,一种粪沟清洗机器人中,所述清洗管上安装有增压泵,所述清洗管的底部连接有固定块,所述固定块的下端连接有容置盒,所述容置盒的底部安装有滚轮,所述滚轮抵接车架上表面,所述容置盒内设有液压杆,所述液压杆的活动端连接有u形框,所述u形框的开口内设有冲洗管,所述冲洗管与清洗管之间连通有蛇形软管。
7.优选的,一种粪沟清洗机器人中,所述u形框上部转动连接有转向轴,所述转向轴一端固接冲洗管、另一端连接有直齿轮,所述u形框的外壁连接有电动推杆,所述电动推杆的活动高端连接有直齿条,所述直齿条啮合连接直齿轮。
8.优选的,一种粪沟清洗机器人中,所述车架的前后两端转动连接有多个行走轮,同侧所述行走轮与履带轮外壁之间共同套设有传动履带,所述车架左侧壁连接有驱动电机,所述驱动电机的右侧输出端连接有蜗杆,所述传动轴的外壁中部连接有蜗轮,所述蜗轮啮合连接蜗杆。
9.优选的,一种粪沟清洗机器人中,所述竖座的前后两端安装有超声波传感器,所述车架的右侧壁上部安装有高清摄像头,所述车架的右侧壁下部安装有推板。
10.优选的,一种粪沟清洗机器人中,所述微控制器具体采用stm32控制器,所述微控制器通过无线方式连接远程控制器。
11.本实用新型的有益效果是:
12.本实用新型结构设计合理,可拖拽水管进入粪道,在粪道中沿直线往复运动,在往复运动的同时,通过冲洗管的俯仰和清洗管的平面转动,实现高压水向粪道侧壁和地面以及顶棚的全方位喷射清洗;整个清洗过程中不需要工作人员进入到粪道中,避免了工作人员在粪道进行清洗消毒作业所产生的风险,保证了工作人员的人身安全和良好的工作体验。
附图说明
13.为了更清楚地说明本实用新型的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
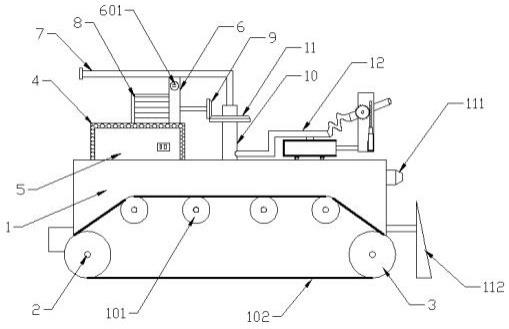
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的内部结构示意图;
16.图3为本实用新型中u形框的结构示意图。
17.图中:1、车架;2、传动轴;3、履带轮;4、电池框;5、蓄电池;6、竖座;7、引水管;8、转向电机;9、锥齿轮;10、中空轴;11、锥齿圈;12、清洗管;13、微控制器;101、行走轮;102、传动履带;103、驱动电机;104、蜗杆;105、蜗轮;601、超声波传感器;111、高清摄像头;112、推板;121、增压泵;122、固定块;123、容置盒;124、滚轮;125、液压杆;126、u形框;127、冲洗管;128、蛇形软管;1261、转向轴;1262、直齿轮;1263、电动推杆;1264、直齿条。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
19.请参阅图1-3所示,本实施例为一种粪沟清洗机器人,包括车架1,车架1的底部左右两侧转动连接有传动轴2,传动轴2的端部安装有履带轮3,车架1的顶部连接左侧连接有电池框4,电池框4内设有蓄电池5,电池框4的顶部连接有竖座6,竖座6顶部连接有引水管7,竖座6左侧壁连接有转向电机8,转向电机8的右侧动力输出端连接有锥齿轮9,车架1的顶部中心转动连接有中空轴10,中空轴10上端通过密封轴承转动连接引水管7,中空轴10的外壁上部连接有锥齿圈11,锥齿圈11啮合连接锥齿轮9,中空轴10的下部连通有清洗管12,车架1内壁连接有微控制器13。
20.清洗管12上安装有增压泵121,清洗管12的底部连接有固定块122,固定块122的下端连接有容置盒123,容置盒123的底部安装有滚轮124,滚轮124抵接车架1上表面,容置盒123内设有液压杆125,液压杆125的活动端连接有u形框126,u形框126的开口内设有冲洗管127,冲洗管127与清洗管12之间连通有蛇形软管128。
21.u形框126上部转动连接有转向轴1261,转向轴1261一端固接冲洗管127、另一端连接有直齿轮1262,u形框126的外壁连接有电动推杆1263,电动推杆1263的活动高端连接有直齿条1264,直齿条1264啮合连接直齿轮1262,便于控制冲洗管127仰俯角度。
22.车架1的前后两端转动连接有多个行走轮101,同侧行走轮101与履带轮3外壁之间共同套设有传动履带102,车架1左侧壁连接有驱动电机103,驱动电机103的右侧输出端连接有蜗杆104,传动轴2的外壁中部连接有蜗轮105,蜗轮105啮合连接蜗杆104,便于控制设备沿直线往复移动。
23.竖座6的前后两端安装有超声波传感器601,便于检测与粪沟侧壁间距,车架1的右侧壁上部安装有高清摄像头111,便于实时监测沟内清洗情况,车架1的右侧壁下部安装有推板112,避免阻碍设备运行。
24.微控制器13具体采用stm32控制器,实时性更好,微控制器13通过无线方式连接远程控制器,操作方便。
25.本实用新型的具体实施方式为:
26.本装置在使用时,利用管接头将外部供水管道与引水管7连接,将设备置于粪沟内,远程控制器通过无线方式控制微控制器13运行,利用驱动电机103带动蜗杆104旋转,蜗杆104啮合传动蜗杆105,使得传动轴2带动履带轮3旋转,履带轮3与行走轮101外壁之间套设传动履带102,能够使设备在粪沟中沿直线往复运动,利用高清摄像头111实时监测沟内清洗情,利用液压杆125带动u形框126移动,能够调整冲洗管127横向位置,利用转向电机8带动锥齿轮9旋转,锥齿轮9啮合传动锥齿圈11,使得中空轴10带动清洗管12进行平面转动,利用电动推杆1263带动直齿条1264移动,直齿轮1262能够带动转向轴1261偏转,实现冲洗管127的仰俯,便于调整冲洗管127与粪沟内壁的相对位置,利用增压泵121提高水压,高压水能够向粪沟侧壁和地面以及顶棚进行全方位喷射清洗,整个清洗过程中不需要工作人员进入到粪道中,避免了工作人员在粪道进行清洗消毒作业所产生的风险,保证了工作人员的人身安全和良好的工作体验,设备行进过程中推板112将清洗废物推出,便于后续收集。
27.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
28.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1