包括用于控制永磁马达的弱磁的机器学习模块的电动工具的制作方法
本文所描述的实施例涉及电动工具马达控制。
背景技术:
技术实现思路
1、本文描述的实施例涉及使用机器学习控制器来控制超前角和/或续流角的电动工具。
2、本文描述的电动工具包括壳体、由壳体支撑的马达、由壳体支撑并被配置为向电动工具提供电力的电池包、被配置为提供与马达的目标转速相对应的输入信号的用户输入、由壳体支撑并被配置为生成指示电动工具的操作参数的传感器数据的多个传感器、以及电子控制器。电子控制器包括电子处理器和存储器。存储器包括由电子处理器执行的机器学习控制程序。电子控制器被配置为:接收目标转速;接收传感器数据;使用机器学习控制程序处理传感器数据;使用机器学习控制程序基于传感器数据生成输出,该输出包括一个或多个弱磁参数;以及基于所生成的输出来控制马达。
3、在一个方面,该机器学习控制程序是在外部系统设备上通过基于示例传感器数据和相关联输出进行训练而生成的,并且由该电动工具从该外部系统设备接收。
4、在另一个方面,该机器学习控制程序是静态机器学习控制程序和可训练机器学习控制程序之一。
5、在另一个方面,该传感器数据包括该电动工具的马达电流、电池包阻抗、电池包电压和运动中的一项或多项。
6、在另一个方面,该一个或多个弱磁参数包括超前角、导通角和续流角中的一个或多个。
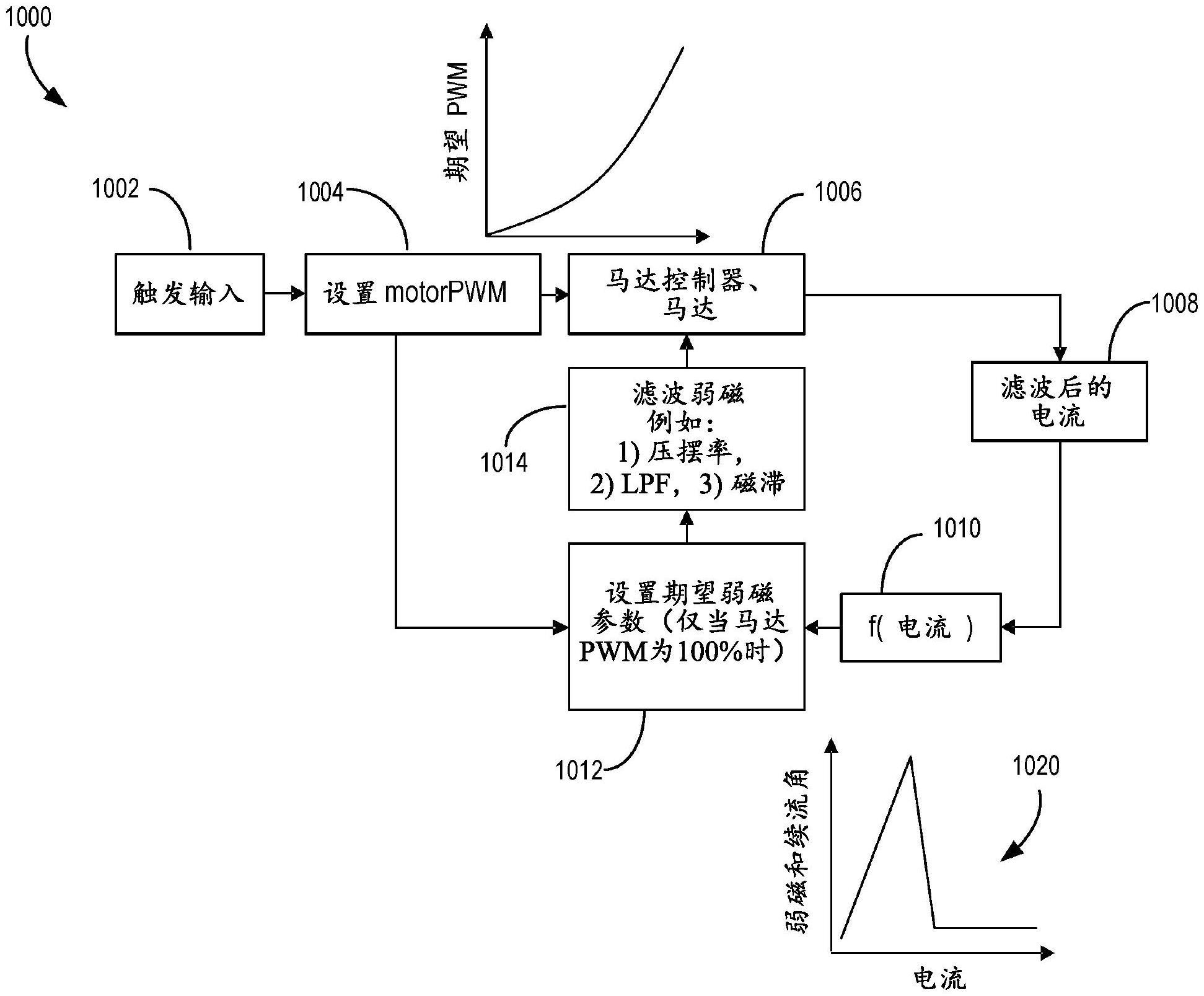
7、在另一个方面,该电子控制器被配置为使用一个或多个滤波器来滤波这些弱磁参数。
8、在另一个方面,该一个或多个滤波器包括压摆率滤波器、低通滤波器和磁滞滤波器中的一个或多个。
9、在另一个方面,该电子控制器进一步被配置为接收一个或多个优先级参数值,其中,该机器学习控制程序基于该传感器数据和这些优先级参数值来生成该输出。
10、本文描述的用于操作电动工具以控制弱磁的方法包括:由电动工具的传感器生成指示电动工具的操作参数的传感器数据;以及由电动工具的电子控制器接收传感器数据。控制器包括电子处理器和存储器。存储器包括由电子处理器执行的机器学习控制程序。该方法进一步包括:使用机器学习控制器的机器学习控制程序处理传感器数据;使用机器学习控制程序基于传感器数据生成输出,该输出包括一个或多个弱磁参数;以及由电子控制器基于输出来控制电动工具的马达。
11、在一个方面,该机器学习控制程序是在外部系统设备上基于示例传感器数据和相关联输出生成的,并且由该电动工具从该外部系统设备接收。
12、在另一个方面,该机器学习控制程序是静态机器学习控制程序和训练后的机器学习控制程序之一。
13、在另一个方面,该传感器数据包括该电动工具的马达电流、电池包阻抗、电池包电压和运动中的一项或多项。
14、在另一个方面,该一个或多个弱磁参数包括超前角、导通角和续流角中的一个或多个。
15、在另一个方面,该方法进一步包括使用一个或多个滤波器来滤波该一个或多个弱磁参数。
16、在另一个方面,该一个或多个滤波器包括压摆率滤波器、低通滤波器和磁滞滤波器中的一个或多个。
17、在另一个方面,该方法进一步包括:经由电子控制器接收一个或多个参数值,以及由机器学习控制程序基于传感器数据和优先级参数值来生成输出。
18、本文描述的其他电动工具包括壳体、由壳体支撑的马达、由壳体支撑并被配置为向电动工具提供电力的电池包、被配置为提供与马达的目标转速相对应的输入信号的用户输入、由壳体支撑并被配置为生成指示电动工具的操作参数的传感器数据的多个传感器、以及电子控制器。电子控制器包括电子处理器和存储器。存储器包括由电子处理器执行的机器学习控制程序。电子控制器被配置为:接收目标转速;接收传感器数据;使用机器学习控制程序处理传感器数据;使用机器学习控制程序基于接收到的目标转速和接收到的传感器数据来生成一个或多个优先级参数。电子控制器进一步被配置为:基于传感器数据生成输出,该输出包括基于一个或多个优先级参数和接收到的传感器数据的一个或多个弱磁参数;以及基于所生成的输出来控制马达。
19、在一些方面,该一个或多个优先级参数包括转速控制参数、最大转速参数、最大功率参数和最大效率参数中的一个或多个。
20、在一些方面,该一个或多个弱磁参数包括超前角、导通角和续流角中的一个或多个。
21、在一些方面,该电子控制器还被配置为使用一个或多个滤波器来滤波这些弱磁参数,其中,该一个或多个滤波器包括压摆率滤波器、低通滤波器和磁滞滤波器中的一个或多个。
22、在详细解释任何实施例之前,应理解,实施例并不将其应用限制于以下描述中阐述的或在附图中展示的配置细节和部件布置。实施例能够以各种方式来实践或实施。此外要理解的是,本文使用的措辞和术语是出于说明的目的,而不应被视为是限制性的。“包括(including)”、“包括(comprising)”或“具有”及其变型的使用意指涵盖其后列出的项及其等同物、以及附加项。除非另有说明或限制,否则宽泛地使用术语“安装”、“连接”、“支撑”和“联接”及其变型,并且其涵盖直接安装、连接、支撑和联接和间接安装、连接、支撑和联接这两种情况。
23、另外,应当理解,实施例可以包括硬件、软件和电子部件或模块,为了讨论的目的,这些电子部件或模块可以被展示和描述为好像大多数部件仅在硬件中实施。然而,本领域的普通技术人员基于对这个详细描述的阅读将认识到,在至少一个实施例中,基于电子的方面可以在可由一个或多个处理单元(比如微处理器和/或专用集成电路(“asic”))执行的软件(例如,存储在非暂态计算机可读介质上)中实施。这样,应当注意,可以利用多个基于硬件和软件的装置以及多个不同的结构部件来实现实施例。例如,说明书中描述的“服务器”、“计算设备”、“控制器”、“处理器”等可以包括一个或多个处理单元、一个或多个计算机可读介质模块、一个或多个输入/输出接口、以及连接部件的不同连接件(例如,系统总线)。
24、与量或条件结合使用的相对术语,比如“约”、“大约”、“基本上”等,将被本领域普通技术人员理解为包括所述的值并且具有由上下文所规定的含义(例如,术语至少包括与测量准确度相关联的误差程度、与特定值相关联的公差[例如,制造、组装、使用等]等)。这样的术语还应当被视为披露了由两个端点的绝对值定义的范围。例如,表述“约2到约4”也披露了范围“2到4”。相对术语可以指加减所指示的值的百分比(例如,1%、5%、10%、或更多)。
25、应当理解,虽然某些附图展示了位于特定设备内的硬件和软件,但是这些描绘仅出于说明的目的。本文中描述为由一个部件执行的功能可以由多个部件以分布式方式执行。同样,由多个部件执行的功能可以由单一部件合并和执行。在一些实施例中,所展示的部件可以组合或划分成单独的软件、固件和/或硬件。例如,逻辑和处理可以分布在多个电子处理器之间,而不是位于单一电子处理器内并由其执行。无论硬件部件和软件部件如何组合或划分,硬件部件和软件部件都可以位于同一计算设备上或者可以分布在通过一个或多个网络或其他合适的通信链路连接的不同计算设备之间。类似地,被描述为执行特定功能的部件也可以执行本文未描述的附加功能。例如,以某种方式“配置”的设备或结构至少以该方式被配置,但是也可以以未明确列出的方式被配置。
26、通过考虑具体实施方式和附图,这些实施例的其他方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!