使用摩擦估计控制机器人夹持器的方法与流程
本发明涉及一种夹持器和一种用于控制这种夹持器的夹持力的方法,尤其是涉及用于机器人应用。
背景技术:
1、适于夹持和运送物品的夹持器是公知的。夹持器通常包括夹持器主体和至少两个夹爪或夹持指,其至少一个夹爪或夹持指可相对于另一个在夹爪打开位置(其例如对应于非活动位置)和夹爪闭合位置(其例如对应于物品夹持位置)之间移动。
2、例如,在气动夹持器的情况下,夹持器主体内容纳有气动致动组,该气动致动组可操作地联接到夹爪,以便借助于压力控制流体使夹爪在打开位置与闭合位置之间移动。夹持力借助于压力调节器来调节,该压力调节器适于调节气动致动组内的控制流体的压力。
3、在一些已知的实施例中,例如夹爪沿着线性导轨滑动的类型,夹持器受到不可忽略的摩擦力的影响,该摩擦力使得在机器人操纵应用中难以精确地执行一些动作。此外,由于摩擦,可能发生胶合或滑动现象。
4、特别地,摩擦力存在的最显著的影响之一在于,对于施加在夹爪上的给定致动力,夹持力随着被夹持的物品与夹持器的基部的距离增加而迅速减小。此外,干摩擦力产生死区,该死区使得施加低于初始力阈值的小的力变得复杂。最后,当控制夹持力时,摩擦力起到干扰的作用,因此使夹持动作的计划和执行复杂化。
5、上述所有影响使得难以:
6、-检测夹持爪与待夹持的物品之间的接触,
7、-评估待搬运的物品是否已经实际上被夹持;
8、-评估是否已经以期望的方式获得了最终的夹持;
9、-控制夹持力。
10、通常,难以控制夹持器的夹爪,尤其是在气动夹持器的情况下。因此,通常,夹爪保持完全打开或完全闭合。
11、例如,控制由气动夹持器施加的力并不容易,因为该力依赖于夹持器腔室内的气压。
12、最后,气动夹持器通常没有位置检测系统。为此,夹持爪的精确定位仅可在“完全打开”和“完全闭合”位置获得,而不能在中间位置获得。
13、在文献中,在一些工作中已经提出了控制气动夹持器的力。例如,在e.ottaviano、m.toti和m.ceccarelli的“在具有气动致动的两个指夹持器中的夹持力控制”(proceedings of icra 2000,第2卷,1976-1981页,2000年)中,提出了比例积分控制;在r.a.romeo等人的“由两个压力调节器致动的气动夹持器的闭环力控制”(ieee/rsj iros,2019年)中,已经提出了商业力传感器以便闭合环;在a.k.paul、j.mishra和m.radke的“气动致动器的降阶滑模控制”(ieee transactions on control systems technology,第2卷第3期,271-276页,1994年)中,提出了一种基于位置测量和速度估计的滑动控制方法。然而,使用例如二次规划函数(r.a.romeo等人,“由两个压力调节器致动的气动夹持器的闭环力控制”,ieee/rsj iros,2019年)或卡尔曼滤波器(r.a.romeo等人,“气动刚性夹持器的动态控制”,ieee robotics and automation letters,2020年)的更复杂的算法没有解决摩擦存在的问题。
技术实现思路
1、因此,本发明的一个目的是提出一种能够补偿摩擦力影响的夹持器和一种夹持力控制方法。
2、本发明的另一个目的是提供一种夹持器和一种夹持力控制方法,其允许更好地搬运所夹持的物品、更精确地控制夹持力以及更精确地控制夹爪的位置。
3、这些目的通过根据权利要求1所述的夹持器和根据权利要求10所述的夹持力控制方法来达到。
4、从属权利要求描述了夹持器的控制方法和夹持器的优选或有利的实施例。
5、根据一般实施例,夹持器包括夹持器主体、至少两个夹持爪,其中至少一个夹持爪可相对于另一个夹持爪在夹爪打开位置和夹爪闭合位置之间移动、容纳在夹持器主体内的致动组和容纳在夹持器主体内的传动组。
6、致动组借助于传动组可操作地联接到至少一个可移动夹爪,以便使可移动夹爪在打开位置和闭合位置之间移动。
7、夹持器还包括适于测量夹爪的绝对位置的夹爪位置传感器,以及适于测量由夹爪施加在物品上的夹持力的可能的夹持力传感器。
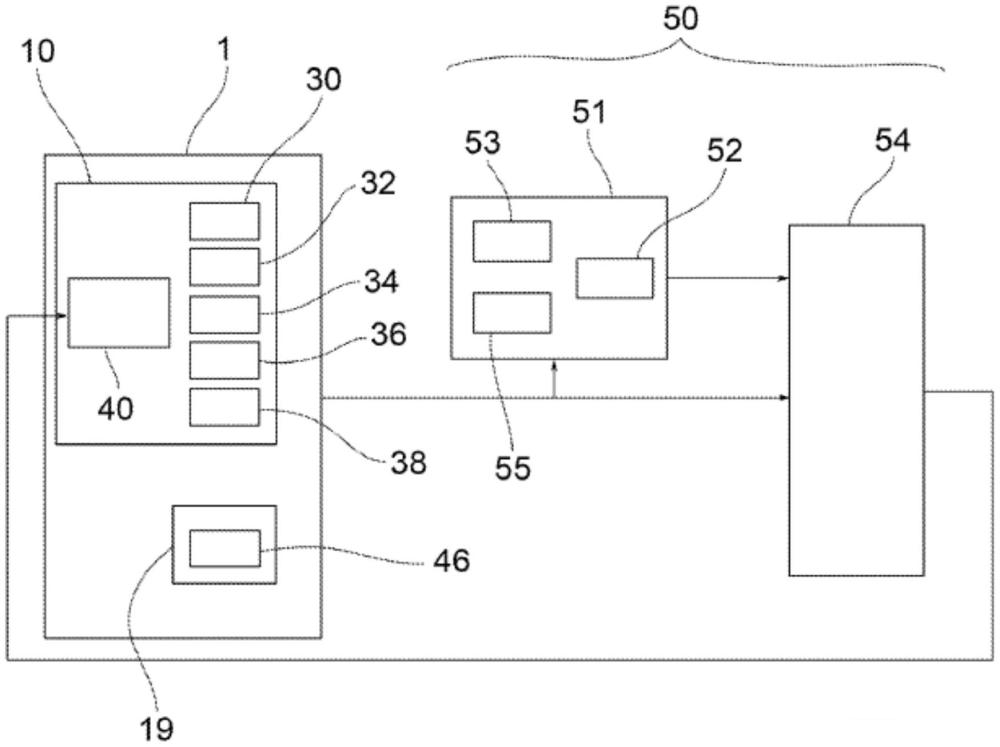
8、夹持器配备有处理单元,该处理单元可操作地连接到这些传感器和致动组。
9、处理单元包括摩擦估计模块和摩擦补偿模块。
10、摩擦估计模块被配置为估计作用在传动组的部件上和夹爪上的静态和/或动态摩擦力,静态摩擦力由估计模块基于传动组的部件和夹爪所经受的约束反应来计算,约束反应至少根据由致动组施加的致动力和/或由夹持力传感器测量的夹持力来计算,所使用的夹持器材料和/或润滑剂的摩擦系数(μi)是已知的。
11、动态摩擦力是根据夹爪的速度、滑动表面的宽度和夹爪的滑动表面之间的距离计算的,所用润滑剂的粘度是已知的。
12、摩擦补偿模块被配置为基于来自传感器的信号和来自估计模块的摩擦力的估计来控制致动组。
13、在一个实施例中,夹持器还包括致动力传感器,致动力传感器适于测量致动组(借助于传动组)施加在至少一个可移动夹爪上的致动力。
14、在一个实施例中,夹持器还包括至少一个压力中心传感器,其适于在夹爪在物品上施加夹持力时检测夹持爪之间的压力中心(cop)的坐标。
15、约束反应ri的至少一些分量可以作为压力中心(cop)的坐标的函数来计算。
16、在一些实施例中,在i表示施加约束反应的表面的数量的情况下,静态摩擦力(ffi)的第i个分量借助于以下公式来估计:
17、ffi=ri*μi*β,
18、其中ri是作用于第i个表面上的约束反应的第i个分量,β是表示摩擦力的方向的参数。
19、在一些实施例中,静态摩擦力(f)借助于以下公式表示的库仑模型进行估算:
20、
21、其中,是夹爪的速度,fc=ri*μc,其中ri是作用于第i个表面上的约束反应的第i个分量,μc是动摩擦系数,并且其中fe是外力的合力。
22、在一些实施例中,在i表示滑动表面的数量的情况下,动态摩擦力(fvi)的第i个分量借助于以下公式估算:
23、
24、其中ci=ηi*(si/di),其中是夹爪的速度,ηi是所使用的润滑剂的粘度,si是第i个滑动表面的宽度,di是第i个滑动表面和其所滑动的表面之间的距离。
25、在一个实施例中,压力中心传感器(cop)基于夹持力传感器,该夹持力传感器适于执行扭矩测量。
26、在这种情况下,处理单元被编程为计算压力中心的坐标(copx,copy),如下所示:
27、
28、其中mx和my分别为有效夹紧力传感器(fm)沿x轴和y轴线测量的力矩,其中|fz|为沿z轴线的实际夹持力(fm)的绝对值。
29、本发明的目的还在于一种控制气动夹持器的夹持力的方法,其中夹持器包括夹持器主体、至少两个夹持爪,至少两个夹持爪中的至少一个能够相对于另一个在夹爪打开位置和夹爪闭合位置之间移动,容纳在夹持器主体内的致动组和容纳在夹持器主体内的传动组,致动组借助于传动组可操作地联接到至少一个可移动夹爪,以便使可移动夹爪在打开位置和闭合位置之间移动。
30、根据一般实施例,所述方法包括以下步骤:
31、-估计作用在传动组的部件上和夹爪上的静态摩擦力和/或动态摩擦力,
32、-基于对摩擦力的估计来调节由致动组施加在至少一个可移动夹爪上的致动力。
33、基于传动组的部件和夹爪所经受的约束反应来计算静态摩擦力,约束反应至少根据由致动组施加的致动力和/或由夹爪施加在物品上的夹持力来计算,所使用的夹持器材料和/或润滑剂的摩擦系数(μi)是已知的。
34、动态摩擦力是根据夹爪的速度、滑动表面的宽度和夹爪的滑动表面之间的距离计算的,所用润滑剂的粘度是已知的。
35、在一些实施例中,在i表示施加约束反应的表面的数量的情况下,静态摩擦力(ffi)的第i个分量借助于以下公式来估计:
36、ffi=ri*μi*β,
37、其中ri是作用于第i个表面上的约束反应的第i个分量,β是指示摩擦力的方向的参数。
38、在一些实施例中,静态摩擦力(f)借助于以下公式表示的库仑模型进行估算:
39、
40、其中,是夹爪的速度,fc=ri*μc,其中ri是作用于第i个表面上的约束反应的第i个分量,μc是动摩擦系数,并且其中fe是外力的合力。
41、在一些实施例中,该方法还用于当夹爪对物品施加夹持力时计算夹持器的夹爪之间的压力中心(cop)的坐标,并根据该压力中心(cop)的坐标计算约束反应ri的至少一些分量。
42、在一些实施例中,在i表示滑动表面的数量的情况下,动态摩擦力(fvi)的第i个分量借助于以下公式估算:
43、
44、其中ci=ηi*(si/di),其中是夹爪的速度,ηi是所使用的润滑剂的运动粘度,si是第i个滑动表面的宽度,di是第i个滑动表面和其所滑动的表面之间的距离。
- 还没有人留言评论。精彩留言会获得点赞!