用于机器人碰撞避免的系统和方法与流程
背景技术:
1、机器人通常被定义为可重新编程和多功能的操纵器,其被设计为通过可变的编程运动来移动材料、零件、工具或专用设备以执行任务。机器人可以是物理锚定的操纵器(例如,工业机械臂)、在整个环境中移动的移动机器人(例如,使用腿、轮子或基于牵引的构件)、或操纵器和移动机器人的某种组合。机器人用于各种行业,包括例如制造、仓库物流、运输、危险环境、勘探和医疗保健。
技术实现思路
1、一些机器人被配置为实现“拾取和放置”操作,其中由机器人在一个地点处抓取的物体被机器人移动到另一地点。然而,有时这样的机器人在没有关于其环境的完整信息的情况下操作,导致机器人部件中的一个或多个在其与未被机器人准确观察和/或建模的物体接触时被损坏。例如,物体(例如,箱子)可以位于与机器人预期不同的地点,或者机器人正在其中操作的围墙(例如,卡车)的一部分(例如,墙壁或天花板)可以位于比预期更靠近机器人的距离处。
2、修复与这些物体碰撞的机器人部件的损坏是昂贵的,并且造成机器人的停机时间。为此,一些实施例涉及通过在机器人部件的至少一部分(例如,诸如抓持器的末端执行器)周围布置“虚拟缓冲器(virtual bumper)”来检测机器人的环境中的这样的物体。使用虚拟缓冲器来检测此类物体使得机器人能够在与物体发生碰撞之前改变其操作(例如,通过在其接近物体时减慢其臂部并使其停止)。
3、本公开的一个方面提供了一种虚拟缓冲器,其被配置为保护机器人设备的部件免受损坏。虚拟缓冲器包括布置在机器人设备上的多个距离传感器和至少一个计算设备。该至少一个计算设备被配置为从该多个距离传感器接收距离测量信号,基于所接收的距离测量信号来检测该部件的运动路径上的至少一个物体,并且控制该机器人以改变该机器人的一个或多个操作以避免该部件和该至少一个物体之间的碰撞。
4、在另一方面,多个距离传感器布置在机器人设备的部件上。在另一方面,多个距离传感器是飞行时间(tof)传感器。在另一方面,多个距离传感器中的至少两个距离传感器被配置为感测不同方向上的物体。在另一方面,多个距离传感器中的第一距离传感器被配置为在第一方向上感测物体,并且多个距离传感器中的第二距离传感器被配置为在与第一方向正交的第二方向上感测物体。在另一方面,该部件是所述机器人设备的抓持器,所述抓持器包括多个吸盘组件,并且该第一方向沿着该多个吸盘组件的长。在另一方面,该部件是机器人设备的抓持器。
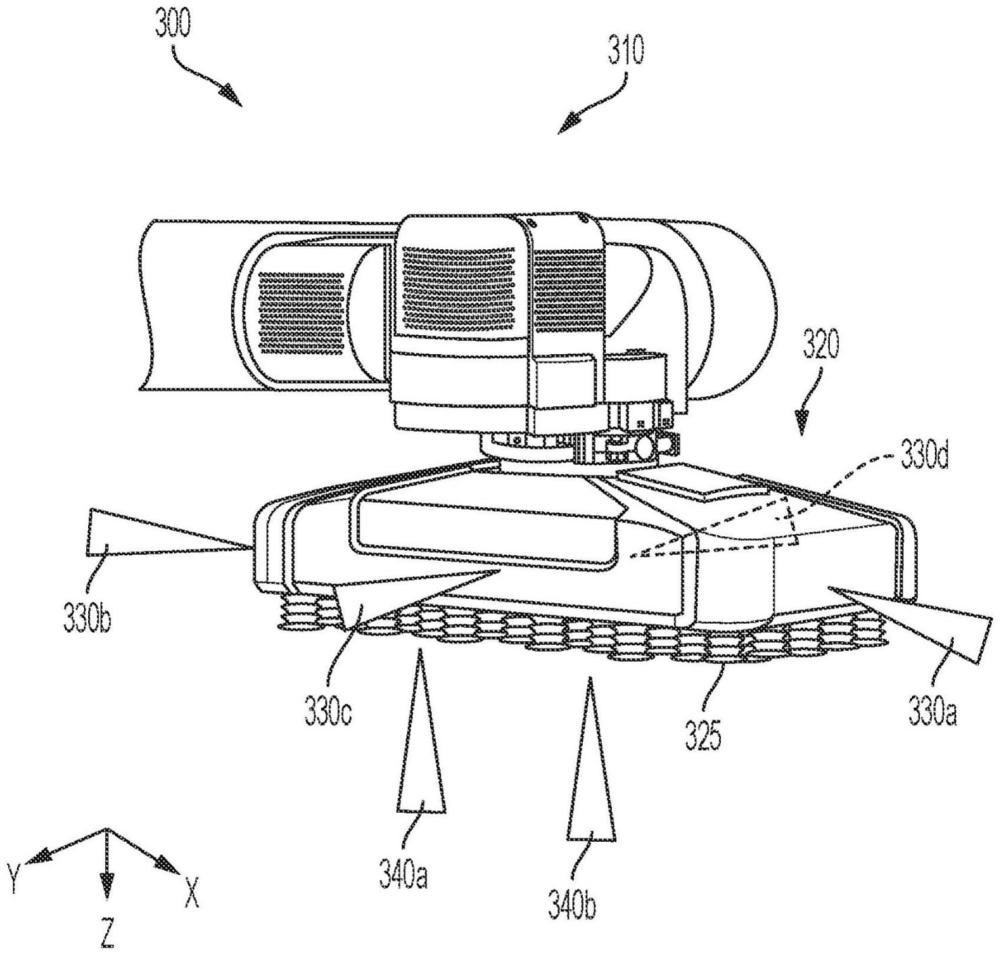
5、在另一方面,抓持器包括沿着第一轴线布置的第一侧、沿着垂直于第一轴线的第二轴线布置的第二侧、以及多个吸盘组件,每个吸盘组件具有沿着垂直于第一轴线和第二轴线的第三轴线布置的长,多个距离传感器中的第一距离传感器布置在第一侧上并且被配置为在沿着第二轴线的第一方向上感测物体,并且该多个距离传感器中的第二距离传感器被布置在该第二侧上并且被配置为在沿着该第一轴线的第二方向上感测物体。在另一方面,多个距离传感器中的第三距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,多个距离传感器中的第四距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,抓持器包括与沿着第一轴线的第一侧相对地布置的第三侧和与沿着第二轴线的第二侧相对地布置的第四侧,其中,多个距离传感器中的第五距离传感器布置在第三侧上并且被配置为在沿着第二轴线的第四方向上感测物体,并且多个距离传感器中的第六距离传感器布置在第四侧上并且被配置为在沿着第一轴线的第五方向上感测物体。
6、在另一方面,检测部件的运动路径上的至少一个物体包括当距离测量信号中表示的多个点位于与部件相距阈值距离以下时检测至少一个物体。在另一方面,所接收的距离测量信号包括从第一距离传感器接收的第一测量信号和从第二距离传感器接收的第二测量信号,并且该至少一个计算设备还被配置为不同地处理该第一测量信号和该第二测量信号以检测该部件的运动路径上的至少一个物体。在另一方面,不同地处理第一测量信号和第二测量信号包括将第一测量信号与第一阈值距离进行比较以及将第二测量信号与不同于第一阈值距离的第二阈值距离进行比较。在另一方面,基于由部件抓取的物体的至少一个特性来确定第一阈值距离和/或第二阈值距离。在另一方面,不同地处理第一测量信号和第二测量信号包括当在部件的运动路径中检测到至少一个物体时忽略第一测量信号或第二测量信号。
7、在另一方面,控制机器人以改变机器人的一个或多个操作包括改变部件所耦接到的机器人的臂部的速度。在另一方面,改变机器人的臂部的速度包括基于部件与检测到的至少一个物体之间的距离来改变机器人的臂部的速度。在另一方面,改变机器人的臂部的速度包括停止机器人的臂部。在另一方面,控制机器人以改变机器人的一个或多个操作包括改变部件所耦接到的机器人的臂部的轨迹。在另一方面,控制机器人以改变机器人的一个或多个操作包括改变耦接到部件的腕部组件的朝向。在另一方面,至少一个物体是机器人的环境中的围墙的一部分。在另一方面,围墙的该部分包括围墙的天花板和/或围墙的至少一个墙壁。
8、本公开的另一方面提供了一种移动操纵器机器人。移动操纵器机器人包括移动基座、耦接到移动基座的臂部、耦接到臂部的抓持器以及控制器,其中抓持器包括布置在其上的多个距离传感器,该控制器被配置为控制移动操纵器机器人的操作以避免抓持器与至少部分地基于由多个距离传感器感测的距离测量信号检测到的物体的碰撞。
9、在另一方面,多个距离传感器中的第一距离传感器被配置为在第一方向上感测物体,并且多个距离传感器中的第二距离传感器被配置为在不同于第一方向的第二方向上感测物体。在另一方面,抓持器包括多个吸盘组件,并且第一方向沿着多个吸盘组件的长。
10、在另一方面,抓持器包括沿着第一轴线布置的第一侧、沿着垂直于第一轴线的第二轴线布置的第二侧、以及多个吸盘组件,每个吸盘组件具有沿着垂直于第一轴线和第二轴线的第三轴线布置的长,多个距离传感器中的第一距离传感器布置在第一侧上并且被配置为在沿着第二轴线的第一方向上感测物体,并且该多个距离传感器中的第二距离传感器被布置在该第二侧上并且被配置为在沿着该第一轴线的第二方向上感测物体。在另一方面,多个距离传感器中的第三距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,多个距离传感器中的第四距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,抓持器包括与沿着第一轴线的第一侧相对地布置的第三侧和与沿着第二轴线的第二侧相对地布置的第四侧,多个距离传感器中的第五距离传感器布置在第三侧上并且被配置为在沿着第二轴线的第四方向上感测物体,并且多个距离传感器中的第六距离传感器布置在第四侧上并且被配置为在沿着第一轴线的第五方向上感测物体。在另一方面,控制移动操纵器机器人的操作包括以下中的一个或多个:改变机器人的臂部的速度、改变部件所耦接到的机器人的臂部的轨迹、或改变耦接到部件的腕部组件的朝向。
11、本公开的另一方面提供了一种用于与移动机器人设备一起使用的抓持器。抓持器包括沿着第一轴线布置的第一侧、沿着第二轴线布置的第二侧、多个吸盘组件(每个吸盘组件具有沿着第三轴线布置的长)、布置在第一侧上并且被配置为在沿着第二轴线的第一方向上感测物体的第一距离传感器、以及布置在第二侧上并且被配置为在沿着第一轴线的第二方向上感测物体的第二距离传感器。
12、在另一方面,第一轴线和第二轴线是垂直的。在另一方面,第三轴线垂直于第一轴线和第二轴线中的每一个。在另一方面,抓持器还包括第三距离传感器,该第三距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,抓持器还包括第四距离传感器,该第四距离传感器被配置为在沿着第三轴线的第三方向上感测物体。在另一方面,抓持器还包括与沿着第一轴线的第一侧相对地布置的第三侧、与沿着第二轴线的第二侧相对地布置的第四侧、布置在第三侧上并且被配置为在沿着第二轴线的第四方向上感测物体的第五距离传感器、以及布置在第四侧上并且被配置为在沿着第一轴线的第五方向上感测物体的第六距离传感器。
13、本公开的另一方面提供了一种防止损坏机器人设备的部件的方法。该方法包括使用布置在部件上的多个距离传感器感测距离测量数据,由至少一个计算设备基于感测到的距离测量数据来检测部件的运动路径上的至少一个物体,以及由至少一个计算设备控制机器人的至少一个操作以避免部件和至少一个物体之间的碰撞。
14、在另一方面,该部件是机器人设备的抓持器。在另一方面,检测部件的运动路径上的至少一个物体包括当距离测量信号中表示的多个点位于与部件相距阈值距离以下时检测至少一个物体。在另一方面,所接收的距离测量信号包括从该多个距离传感器中的第一距离传感器接收的第一测量信号和从该多个距离传感器中的第二距离传感器接收的第二测量信号,并且所述方法还包括不同地处理该第一测量信号和该第二测量信号以检测该部件的所述运动路径上的至少一个物体。在另一方面,不同地处理第一测量信号和第二测量信号包括将第一测量信号与第一阈值距离进行比较以及将第二测量信号与不同于第一阈值距离的第二阈值距离进行比较。
15、在另一方面,控制机器人的至少一个操作包括改变部件所耦接到的机器人的臂部的速度。在另一方面,改变机器人的臂部的速度包括基于部件与检测到的至少一个物体之间的距离来改变机器人的臂部的速度。在另一方面,改变机器人的臂部的速度包括停止机器人的臂部。在另一方面,控制机器人的至少一个操作包括改变部件所耦接到的机器人的臂部的轨迹。在另一方面,控制机器人的至少一个操作包括改变耦接到部件的腕部组件的朝向。
16、应当理解,前述概念和下面讨论的附加概念可以以任何合适的组合布置,因为本公开在这方面不受限制。此外,当结合附图考虑时,根据以下对各种非限制性实施例的详细描述,本公开的其他优点和新颖特征将变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!