工业机器人和具有用于交换润滑剂的装置的系统的制作方法
本发明总体上涉及工业机器人。具体地,提供了一种包括含有润滑剂的运动学装置的工业机器人,以及一种包括工业机器人和维修工具的系统。
背景技术:
1、工业机器人被广泛用于各种目的。工业机器人通常包括多个连杆和连杆之间的多个关节。通过驱动关节,一个连杆可以相对于另一个连杆移动。为此,每个关节通常包括齿轮箱和被布置为经由齿轮箱驱动关节的电动马达。每组电动马达和齿轮箱通常相对于工业机器人的外壳定位在外部。在这些情况下,可以容易地访问电动马达和齿轮箱,诸如用于维护。
2、一些工业机器人在外壳内包括电动马达和齿轮箱。例如,当工业机器人在其中工业机器人不应引起污染的卫生环境中操作时,这可能是期望的。这种卫生环境的示例包括食品、饮料或药品的加工环境。在这样的卫生环境中,工业机器人还可能需要承受苛刻的冲洗环境。同样由于这个原因,如果电动马达和齿轮箱位于外壳内部是有利的。在外壳内包括电动马达和齿轮箱的工业机器人是先前已知的。
3、jph 07246587a公开了一种工业机器人,其包括形成外壳的多个关节和多个连杆。多个电动马达和减速器被布置在外壳内部。
技术实现思路
1、当工业机器人包括外部齿轮箱和其它运动学装置时,它们易于访问以进行换油。然而,对于在外壳内部包括齿轮箱的工业机器人,难以交换齿轮箱中的油。如今,工业机器人需要被拆卸以访问齿轮箱用于更换其中的油。该过程非常耗时且困难。拆卸意味着通过工业机器人的电连接和/或机械链断开,使得工业机器人不再操作。例如,至少一对连杆可以是机械分离的。
2、本发明的一个目的是提供一种改进的工业机器人。
3、本发明的另一个目的是提供一种包括工业机器人的改进系统。
4、这些目的通过根据所附权利要求1的工业机器人和根据所附权利要求10的系统来实现。
5、本发明基于以下认识:通过提供一个或多个流体连接件,该一个或多个流体连接件与例如在工业机器人的盖后面和外壳内部的齿轮箱流体连通,当该盖被移除时,这些流体连接件可以容易地被访问以交换该齿轮箱中的油,并且当该盖被安装以提供该外壳的卫生设计时,这些流体连接件可以被隐藏在该盖后面。
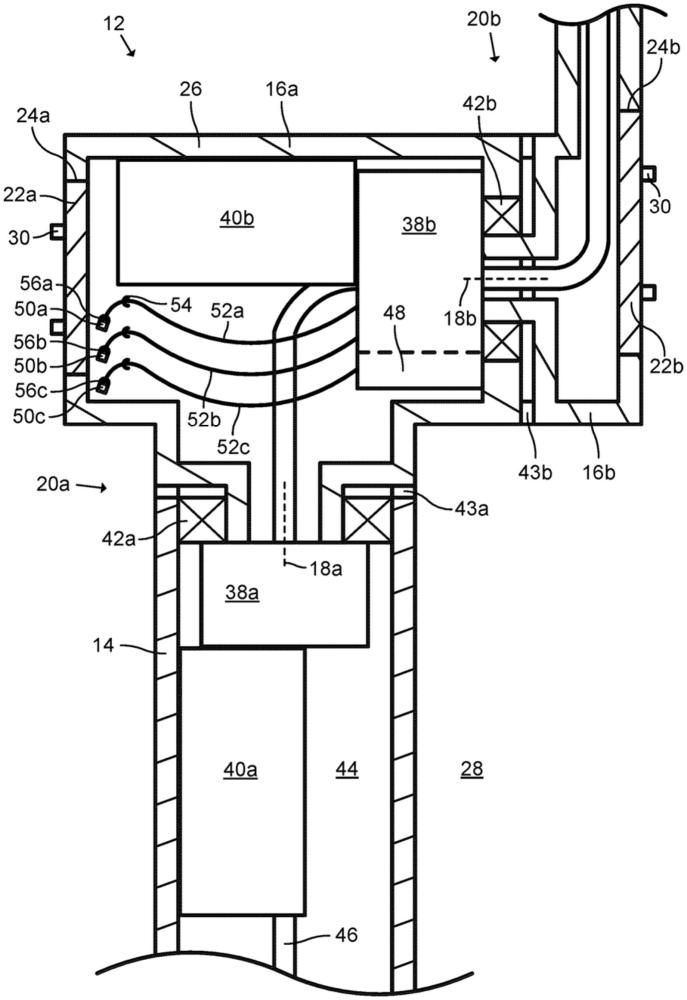
6、根据第一方面,提供了一种工业机器人,该工业机器人包括多个关节;多个连杆,被布置为通过关节被驱动运动;外壳,外壳包括连杆、开口和用于选择性地关闭该开口的盖,外壳限定工业机器人的内部区域和外部区域;以及对于至少一个关节,与该关节相关联并且定位在该内部区域中的一个运动学装置和与该运动学装置流体连通的至少一个流体连接件,每个流体连接件被布置为向该运动学装置供应润滑剂或从该运动学装置接收润滑剂,并且当该盖被移除用于将一个维修工具连接到该流体连接件上时可通过该开口从该外部区域访问。
7、由于每个流体连接件是通过该开口可访问的,该工业机器人能够使得有效地访问与为该内部区域中的一个或多个运动学装置交换润滑剂相关联的一个或多个接口。尽管多个运动学装置被紧密地布置在外壳内部,但是能够实现有效的访问。使用盖来提供对一个或多个流体连接件的访问和选择性地提供外壳的外部密封的原理使得能够进行良好的卫生设计和容易地更换润滑剂。当使用必须比与食品不相容的润滑剂更频繁地更换的食品级润滑剂时,更换润滑剂的容易性是特别有价值的。
8、每个流体连接件可以与外壳中的开口相关联。该开口又可以与工业机器人的关节相关联。对于每个开口,流体连接件可以与运动学装置流体连通,该运动学装置可以与或不与关联于开口的关节相关联。换句话说,不同关节的运动学装置可以通过单个开口经由流体连接件访问。
9、当盖关闭开口时,每个流体连接件可以被定位成距离开口和/或盖小于20cm(厘米),诸如小于10cm,诸如小于5cm。这样,当盖被移除时,每个流体连接件容易从外部区域通过开口访问。然后可以将维修工具(诸如在此描述的维修工具)连接到在该盖后面暴露的每个流体连接件上用于交换该运动学装置中的润滑剂。
10、工业机器人可以包括至少三个可编程轴线,诸如六个或七个可编程轴线。可编程轴线可以设置在串行操纵器中。
11、每个连杆可以是中空的。盖可以被配置为密封地关闭相关联的开口。润滑剂可以是油或油脂。本技术提交日的国家科学基金会可以将润滑剂分类为食品级润滑剂,诸如h1润滑剂。
12、对于每个流体连接件,该工业机器人可以还包括:在该流体连接件与该运动学装置之间提供流体连通的流体管线。在该内部区域中的一个或多个运动学装置可以在该运动学装置与关联于该运动学装置的一个或多个流体连接件之间配备有一个或多个此类流体管线。
13、由于提供了一个或多个流体管线,该工业机器人不必被设计为使得每个运动学装置可以用手通过该外壳中的一个开口到达。相反,如果一个或多个流体管线被路由到开口,使得可以例如通过手到达一个或多个流体连接件,则这是足够的。以此方式,该一个或多个流体管线实现了工业机器人的更紧凑的设计。
14、每个流体管线可以被配置为使得当该盖被移除时该流体连接件可以被定位在该外部区域中。为此,每个流体管线可以是柔性的。当流体连接件被定位在关闭的盖内部时,每个流体管线可以设置有松弛部。当盖被移除并且一个或多个流体连接件通过开口被拉出时,该松弛部可以减少或消除。
15、每个流体管线可以包括软管。
16、运动学装置可以是变速器、电动马达、轴承或与关节相关联的动态密封件。变速器可以是齿轮箱。
17、外壳可以是气密密封的。这样,外壳可以承受冲洗过程。因此,当关闭开口时,盖有助于气密密封。
18、对于每个流体连接件,该工业机器人可以包括与该流体连接件和/或与该运动学装置相关联的唯一标识特征。每个标识特征可以是机器可读标识特征,诸如视觉代码,例如qr(快速响应)代码。该标识特征可以包含关于与该流体连接件相关联的运动学装置的类型,应该在与该流体连接件相关联的运动学装置中使用的润滑剂的类型和/或应该在与该流体连接件相关联的运动学装置中使用的润滑剂的量的信息。
19、盖和运动学装置可以相对于与关节相关联的轴线被定位在与关节相关联的连杆的相对区域中。例如,盖和运动学装置可以沿轴线被定位在连杆的几何中心点的相对侧上。
20、该运动学装置可以被定位在公共连杆内部,并且该开口可以被提供在该公共连杆中。
21、根据第二方面,提供了一种包括根据第一方面的工业机器人和维修工具的系统。在这种情况下,该维修工具可以被配置为连接到该至少一个流体连接件中的一个流体连接件以向该运动学装置供应润滑剂。该维修工具还可以被配置为连接到该至少一个流体连接件中的另一个流体连接件以从该运动学装置接收润滑剂。该维修工具还可以被配置为连接到该至少一个流体连接件中的另一个流体连接件以将空气从该运动学装置排空。
22、该维修工具可以包括读取器,该读取器被配置为用于标识该标识特征。读取器可以是机器代码读取器,诸如被配置为从标识特征识别和提取信息的照相机。
23、维修工具可以包括至少一个维修工具连接件。每个维修工具连接件可以被配置为连接到与这些关节中的一个关节相关联的唯一流体连接件上。维修工具连接件可以包括输入连接件、输出连接件和/或空气排出连接件。
24、每对维修工具连接件和流体连接件可形成快速耦合。
- 还没有人留言评论。精彩留言会获得点赞!