一种工业机器人连接底座的制作方法
本发明涉及工业机器人,具体为一种工业机器人连接底座。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,目前大多数工业机器人在使用时,都是安装在一个底座上。
2、目前,市场上的申请号为cn202220035023.6的中国专利公开了一种便于调整角度的工业机器人连接底座包括底板和控制箱,所述控制箱的一侧设置有第一转动杆,所述第一转动杆的一侧固定连接有转动板,所述转动板的一侧固定连接有固定杆,所述转动板的一侧通过轴承转动连接有第二转动杆,所述第二转动杆的外表面固定连接有连接板,所述连接板的一侧固定连接有滑杆,所述滑杆的一侧固定连接有限位板,所述滑杆的外表面滑动连接有滑板,所述滑板的一侧开设有滑槽,所述滑板的一侧固定连接有移动板,所述移动板的一侧固定连接有套管,所述套管的内部通过螺纹连接有丝杆,所述丝杆的一侧设置有电机,所述电机的一侧固定连接转动板,所述转动板的一侧开设有通孔。
3、上述申请解决了现有的工业机器人连接底座在进行使用时,不便于进行角度调节,降低了工业机器人的工作效率的问题,因此本发明提供另一种新的解决方案,以解决现有的工业机器人连接底座在进行使用时,不便于进行角度调节,降低了工业机器人的工作效率的问题。
技术实现思路
1、本发明的目的是提供一种工业机器人连接底座,具有便于进行角度调节,从而增加工业机器人工作效率的优点。
2、为解决上述技术问题,本发明采用如下技术方案:
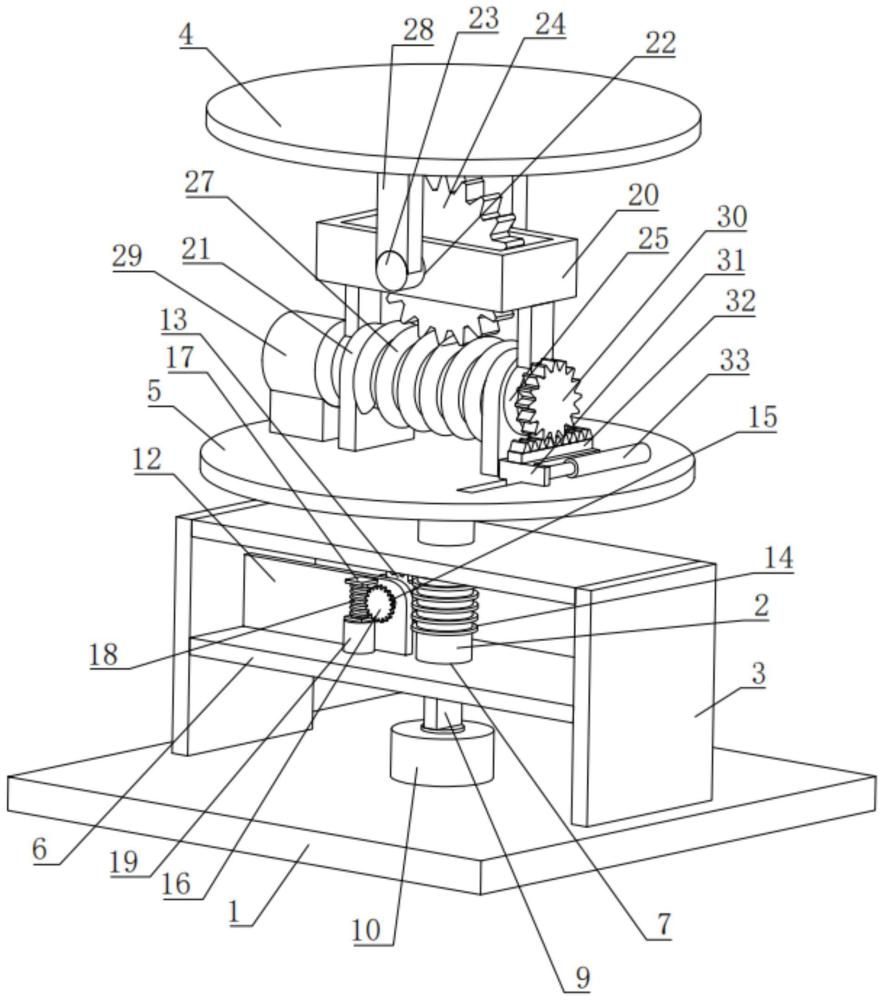
3、本发明提供一种工业机器人连接底座,包括固定板、支撑柱、两个相对的支撑板、用于安装工业机器人的底板,两个所述支撑板均设置在固定板的顶端,所述支撑柱竖直位于两个支撑板之间,且支撑柱的顶端水平设有位于两个支撑板上方的放置板,两个所述支撑板之间设有用于带动支撑柱转动且带动支撑柱竖直上下移动的带动件,所述底板位于放置板的上方,且放置板与底板之间通过调节件连接,调节件用于调整底板在放置板上的位置与角度。
4、通过采用上述技术方案,将工业机器人安装在底板上,通过带动件带动支撑柱进行转动,此时支撑柱带动放置板与调节件与底板与工业机器人转动,此时即可对工业机器人进行水平方向的角度调节,从而增加工业机器人工作效率,通过带动件带动支撑柱竖直上下移动,此时支撑柱带动放置板与调节件与底板与工业机器人竖直上下移动,此时即可便于调整工业机器人的高度,通过调节件调整底板在放置板上的位置与角度,此时即可进一步对工业机器人进行角度调节,使用简单方便。
5、优选地,所述带动件包括水平设置在两个支撑板之间的支撑台,两个所述支撑台上下相对,且两个支撑台的顶端均开设有用于供支撑柱一端竖直穿过的凹槽,所述支撑柱的底端设有方形槽,且方形槽内竖直滑移连接有方形杆,所述方形杆的底端竖直延伸至方形槽外,所述固定板的顶端设有位于支撑柱下方的伺服电机,且伺服电机的转动轴一端与方形杆的底端固定连接,其中一个所述支撑板上设有位于两个支撑台之间的安装板,且安装板的一侧转动连接有第一齿轮,所述支撑柱上同轴固定连接有若干与第一齿轮相啮合的推环,且各个推环均位于两个支撑台之间并均沿支撑柱的长度方向分布,所述安装板上设有用于驱动第一齿轮转动的第一驱动件。
6、优选地,所述第一驱动件包括同轴设置在第一齿轮上的转柱,且转柱远离第一齿轮的一端穿过安装板并设有第一蜗轮,所述安装板背离第一齿轮的一侧设有两个相对的第一挡板,且两个第一挡板之间转动连接有与第一蜗轮相啮合的第一蜗杆,所述第一蜗杆位于第一蜗轮的一侧,其中一个所述第一挡板上设有用于驱动第一蜗杆转动的第一电机。
7、优选地,所述调节件包括回形框以及设置在放置板顶端的两个第一板,所述回形框水平位于两个第一板的上方,且回形框的相对两侧均开设有第一转槽,两个所述第一转槽内均转动连接有第一转轴,且两个第一转轴之间同轴固定连接有位于回形框内的第二蜗轮,两个所述第一板相互背离的一侧上方均转动连接有转环,所述回形框底端的相对两侧均竖直设有第二板,且两个第二板的底端分别与两个转环的外壁固定连接,两个所述第一板之间转动连接有第二蜗杆,且第二蜗杆与转环同轴设置,所述第二蜗杆位于第二蜗轮的下方并与第二蜗轮相啮合,所述底板的底端竖直设有两个相对的第三板,且两个第三板分别与两个第一转轴背离第二蜗轮的一端固定连接,此时所述回形框位于两个第三板之间,所述放置板上设有第二电机,且第二电机的转动轴一端穿过其中一个转环与第一板并与第二蜗杆同轴固定连接,所述放置板上设有用于驱动其中一个转环转动的转动件。
8、优选地,所述转动件包括同轴设置在其中一个转环上的第二齿轮以及水平滑移连接在放置板顶端的移动板,所述移动板位于第二齿轮的下方,且移动板的顶端沿移动板的长度方向设有与第二齿轮相啮合的齿条,所述放置板上设有用于推动移动板水平移动的气缸。
9、优选地,所述调节件包括设置在放置板顶端的两个第四板,且两个第四板之间水平固定连接有第一柱,所述第一柱的一侧水平固定连接有第二柱,且第二柱远离第一柱的一端设有转筒,所述转筒内转动连接有第二转轴,且第二转轴的相对两端均水平延伸至转筒外,所述第二转轴位于转筒外的一端均设有l形连接柱,且两个连接柱远离第二转轴的一端通过方形块连接,所述方形块与转筒相对,且方形块靠近转筒的一侧开设有第二转槽,所述第二转槽内转动连接有第三转轴,所述第三转轴背离转筒的一端延伸至第二转槽外并竖直设有第一摆杆,所述第一摆杆的顶端水平设有位于转筒上方的第二摆杆,所述底板固定连接在第二摆杆的顶端,两个所述第四板上设有用于驱动第二转轴在转筒内转动以及第三转轴在第二转槽内转动的第二驱动件。
10、优选地,所述第二驱动件包括同轴设置在第三转轴靠近转筒一端的第一锥形齿轮以及同轴转动连接在第二转轴上的两个圆形板,两个所述圆形板相互靠近的一侧均同轴设有第二锥形齿轮,两个所述第二锥形齿轮分别位于转筒的两侧,所述第一锥形齿轮位于两个第二锥形齿轮之间并均与两个第二锥形齿轮相啮合,两个所述圆形板相互背离的一侧均同轴设置第三锥形齿轮,两个所述第四板靠近第三锥形齿轮的一侧均开设有第三转槽,且第三转槽内均转动连接有第四转轴,两个所述第四转轴的一端均同轴固定连接有第四锥形齿轮,两个所述第四锥形齿轮分别与两个第三锥形齿轮相啮合,两个所述第四板上均设有用于驱动第四转轴转动的第三驱动件。
11、优选地,所述第三驱动件包括设置在第四转轴背离第四锥形齿轮一端的第三蜗轮以及相对设置在第四板上的两个第二挡板,且两个第二挡板之间转动连接有与第三蜗轮相啮合的第三蜗杆,其中一个所述第二挡板上设有用于驱动第三蜗杆转动的第三电机。
12、优选地,所述转筒的外壁底端竖直设有顶杆,且顶杆的底端与放置板的顶端固定连接。
13、优选地,所述第一摆杆的一侧与第二摆杆的底端之间设有倾斜的加强杆,所述第二摆杆的相对两侧均设有与底板底端接触的接触板。
14、本发明的有益效果在于:将工业机器人安装在底板上,通过带动件带动支撑柱进行转动,此时支撑柱带动放置板与调节件与底板与工业机器人转动,此时即可对工业机器人进行水平方向的角度调节,从而增加工业机器人工作效率,通过带动件带动支撑柱竖直上下移动,此时支撑柱带动放置板与调节件与底板与工业机器人竖直上下移动,此时即可便于调整工业机器人的高度,通过调节件调整底板在放置板上的位置与角度,此时即可进一步对工业机器人进行角度调节,使用简单方便。
- 还没有人留言评论。精彩留言会获得点赞!