一种主手机械臂和主手机械臂的关节扭矩控制方法与流程
本发明涉及手术机器人,特别涉及一种主手机械臂和一种主手机械臂的关节扭矩控制方法。
背景技术:
1、主从式微创手术机器人是将机器人技术与传统的微创手术技术相结合的一种机器人系统,主手是主从式微创手术机器人的主控制器,是医生与微创手术机器人交互的关键设备以及进行人机交互的载体,主手一方面作为输入装置将医生手部的操作动作传递给从端控制从手完成手术操作,另一方面作为输出装置能够将从手与手术环境的交互作用力反馈给医生实现临场力感觉。
2、主手机械臂包含多个转动自由度,需要在各轴上安装驱动模组,而现有的主手机械臂中驱动模组的布置方式和驱动组件的结构设置,都难以使各轴的体积和重量降低,特别是末端负载的体积和重量,这对提升操作手感造成了一定的阻碍,并且往往无法兼顾操作过程中结构的稳定性。主手机械臂中的驱动模块若采用大减速比的减速器,存在较大的摩擦力,导致关节输出扭矩减小,为了补偿减速器摩擦力,还需要对主手机械臂的关节扭矩进行控制。
技术实现思路
1、鉴于上述问题,本发明提供一种克服上述问题或者至少部分地解决上述问题的一种主手机械臂和主手机械臂的关节扭矩控制方法,技术方案如下所述:
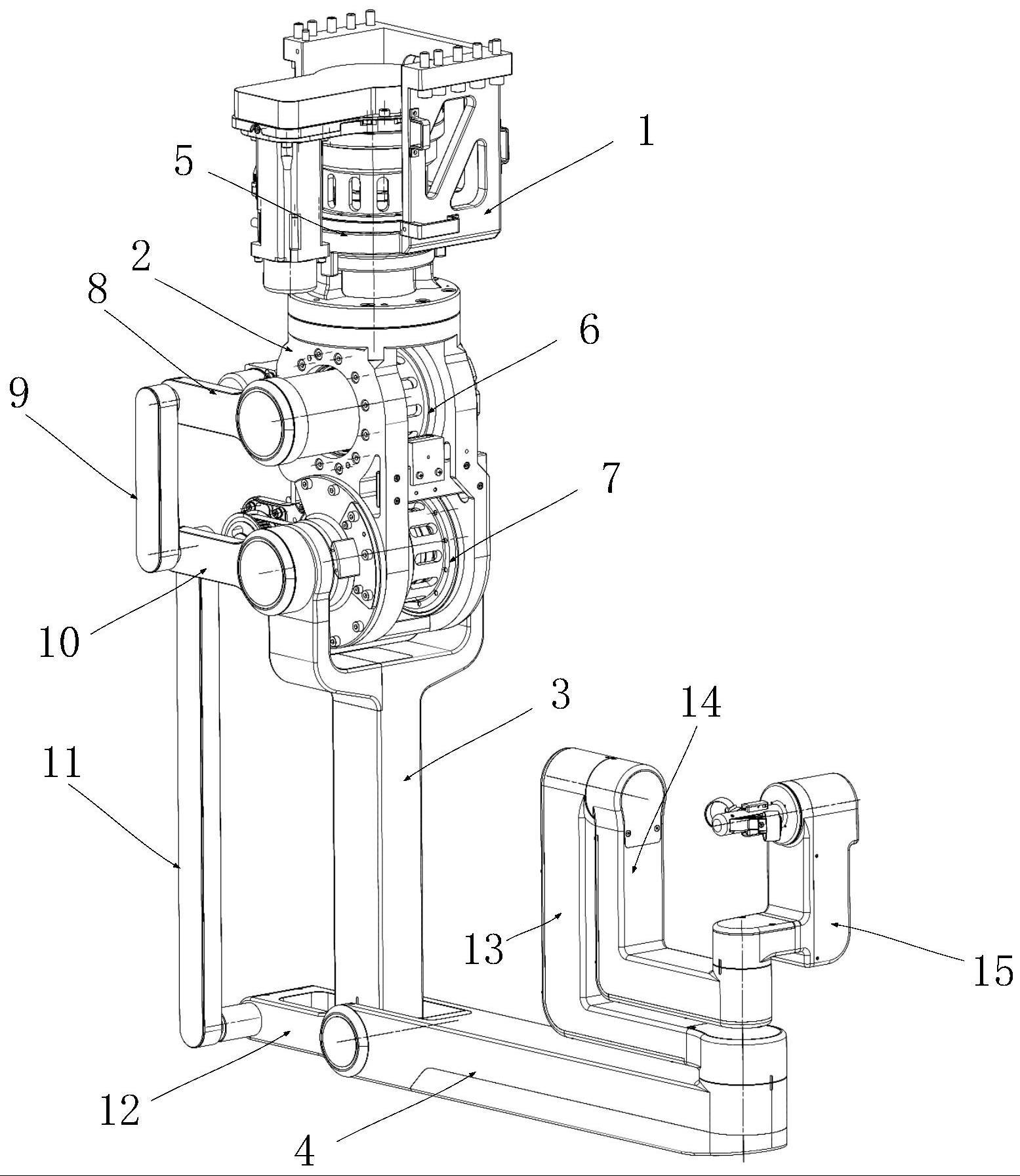
2、一种主手机械臂,包括:
3、固定座;
4、一轴连杆,与所述固定座绕第一旋转轴转动连接;
5、二轴连杆,与所述一轴连杆绕第二旋转轴转动连接;
6、三轴连杆,与所述二轴连杆绕第三旋转轴转动连接;
7、二轴驱动模组,设置在所述一轴连杆上,所述二轴驱动模组的输出端连接所述二轴连杆,所述二轴驱动模组直接驱动所述二轴连杆绕第二旋转轴转动;
8、三轴驱动模组,设置在所述一轴连杆或所述二轴连杆上;
9、驱动连接组件,设置在所述三轴驱动模组的输出端和三轴连杆之间,用于将所述三轴驱动模组输出的转动传递到所述三轴连杆,使所述三轴驱动模组通过所述驱动连接组件驱动所述三轴连杆绕第三旋转轴转动。
10、进一步的,所述二轴驱动模组和三轴驱动模组均包括依次连接的电机和减速器,所述减速器的输出端设置扭矩传感器。
11、进一步的,所述二轴驱动模组和三轴驱动模组平行设置于所述一轴连杆内,所述二轴驱动模组的输出端提供绕第二旋转轴的转动;所述三轴驱动模组的输出端提供绕第一中间转轴的转动,所述第三旋转轴和所述第一中间转轴平行,所述第一中间转轴的转动通过所述驱动连接组件传递到所述第三旋转轴,从而驱动所述第三旋转轴的转动。
12、进一步的,所述二轴驱动模组和三轴驱动模组在所述一轴连杆内沿平行于第一旋转轴方向并列排布,且所述二轴驱动模组设置在所述一轴连杆内更靠近所述二轴连杆的一侧。
13、进一步的,所述驱动连接组件包括第一连接件、第二连接件、第三连接件、第四连接件和第五连接件,
14、所述第一连接件的一端与所述三轴驱动模组的输出端连接,所述第一连接件的另一端与所述第二连接件的一端转动连接;
15、所述第三连接件的一端与所述二轴驱动模组的输出端连接,所述第三连接件的另一端与所述第二连接件的另一端和所述第四连接件的一端转动连接;
16、所述第五连接件的一端与第四连接件的另一端转动连接,所述第五连接件的另一端连与所述三轴连杆固定连接。
17、进一步的,所述第一连接件、第二连接件、第三连接件与所述一轴连杆构成平行四边形连接,所述第三连接件、第四连接件、第五连接件与所述二轴连杆构成平行四边形连接。
18、进一步的,所述二轴驱动模组和三轴驱动模组沿垂直于第一旋转轴方向并列排布;所述二轴驱动模组的输出端提供绕第二旋转轴的转动,所述三轴驱动模组的输出端提供绕第一中间转轴的转动,第二旋转轴和第一中间转轴同轴;所述第三旋转轴和所述第一中间转轴平行,所述第一中间转轴的转动通过所述驱动连接组件传递到所述第三旋转轴,从而驱动所述第三旋转轴的转动。
19、进一步的,所述三轴驱动模组设置在所述二轴连杆上,并跟随所述二轴连杆一同转动。
20、进一步的,所述三轴驱动模组设置在所述一轴连杆上,且所述二轴驱动模组的输出轴和所述三轴驱动模组的输出轴均通过轴承安装到所述一轴连杆上。
21、进一步的,所述驱动连接组件包括第六连接件和第七连接件,所述第六连接件的一端与所述三轴驱动模组的输出端连接,另一端连接所述第七连接件的一端,所述第七连接件的另一端连接所述三轴连杆;所述第六连接件、第七连接件、二轴连杆与部分三轴连杆构成平行四边形连接。
22、进一步的,所述主手机械臂还包括设置在所述固定座内的一轴驱动模组,所述一轴驱动模组的输出端连接所述一轴连杆,所述一轴驱动模组直接驱动所述一轴连杆绕第一旋转轴转动;所述一轴驱动模组包括依次连接的电机和减速器,所述减速器的输出端设置扭矩传感器。
23、进一步的,所述电机的输出轴设置有抱闸结构。
24、进一步的,所述主手机械臂还包括四轴连杆、五轴连杆和六轴连杆,所述四轴连杆与所述三轴连杆转动连接,所述五轴连杆与所述四轴连杆转动连接,所述六轴连杆与所述五轴连杆转动连接,所述六轴连杆的自由端设置主手工具。
25、一种主手机械臂的关节扭矩控制方法,所述主手机械臂采用如上述的主手机械臂;所述主手机械臂的关节扭矩控制方法包括:
26、确定控制对象,所述控制对象为所述主手机械臂中的一轴驱动模组、二轴驱动模组和三轴驱动模组的至少一个;
27、获取所述控制对象的当前运动状态,并根据所述当前运动状态确定所述控制对象对应的预设扭矩值;
28、按照所述预设扭矩值控制所述控制对象工作,并利用扭矩传感器检测所述控制对象输出的实际扭矩值;
29、计算所述预设扭矩值和所述实际扭矩值的扭矩差值,根据所述扭矩差值调整所述控制对象的工作电流,以使调整工作电流后的控制对象输出的实际扭矩值等于所述预设扭矩值。
30、进一步的,根据所述当前运动状态确定所述控制对象对应的预设扭矩值,包括:
31、获取所述主手机械臂的动力学模型;
32、将所述当前运动状态输入所述动力学模型,得到所述控制对象对应的预设扭矩值。
33、进一步的,在按照所述预设扭矩值控制所述控制对象工作之前,还包括:
34、将所述预设扭矩值与第一比例系数的乘积作为预启动扭矩值;其中,所述第一比例系数大于等于0且小于等于1;
35、确定所述预启动扭矩值对应的预启动电流值,通过前馈控制的方式控制所述控制对象按照所述预启动电流值工作。
36、进一步的,在按照所述预设扭矩值控制所述控制对象工作之前,还包括:
37、根据工况与摩擦力的对应关系确定所述控制对象的当前摩擦力;
38、将所述当前摩擦力与第二比例系数的乘积作为预启动摩擦力,并确定所述预启动摩擦力对应的电流值;其中,所述第二比例系数大于等于0且小于等于1;
39、通过前馈控制的方式控制所述控制对象按照所述预启动摩擦力对应的电流值工作。
40、与现有技术相比,本发明具有以下优点:本发明实施例提供的主手机械臂方案中,将三轴驱动模组前置,三轴驱动模组可设置在一轴连杆或二轴连杆上,并通过驱动连接组件将三轴驱动模组的输出扭矩传递至三轴连杆,减轻了末端负载,提升了操作手感;进一步的提供了将二轴驱动模组和三轴驱动模组的输出轴线平行不同轴设置以及将二轴驱动模组和三轴驱动模组的输出轴线同轴设置的方案,不同轴时能够减小主手结构宽度,使得安装更加方面与灵活,且二轴连杆、三轴连杆的转动互不干涉耦合;实施例中驱动连接组件采用双平行四边形连杆结构,保证了操作过程中结构的稳定性;本发明实施例中在一轴驱动模组、二轴驱动模组和三轴驱动模组中可选包括依次连接的电机和减速器,减速器输出端还可设置扭矩传感器,本发明实施例提供的主手机械臂的关节扭矩控制方法方案中,可通过所设置的扭矩传感器直接采集控制对象如一轴驱动模组、二轴驱动模组和三轴驱动模组中的至少一个的输出部位的实际扭矩值,进而对控制对象的工作电流进行调整,能够提高主手机械臂的关节扭矩控制精度,降低重力和减速器摩擦力对拖动手术机器人主手机械臂的影响。
41、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!