城市轨道交通变电站巡检机器人、巡检方法及计算机设备与流程
本技术涉及轨道交通的,尤其是涉及一种城市轨道交通变电站巡检机器人、巡检方法及计算机设备。
背景技术:
1、轨道交通在城市发展中起到至关重要的作用。在城市轨道交通中,供电系统为轨道设备运行提供动力,因此,需要对供电系统的实时监控以保证城市轨道交通能够顺利运行。
2、目前一般通过工作人员在变电站进行巡检或值守在变电站以对供电系统进行实施监控,变电站中设置有多排变电柜。在人工巡检中,需要工作人员对变电站内所有变电柜的指示灯、设备仪表盘以及机柜的开关状态进行注意查看,这种方式对工作人员的工作负担较重,因此,应用于变电柜的巡检机器人应运而生。
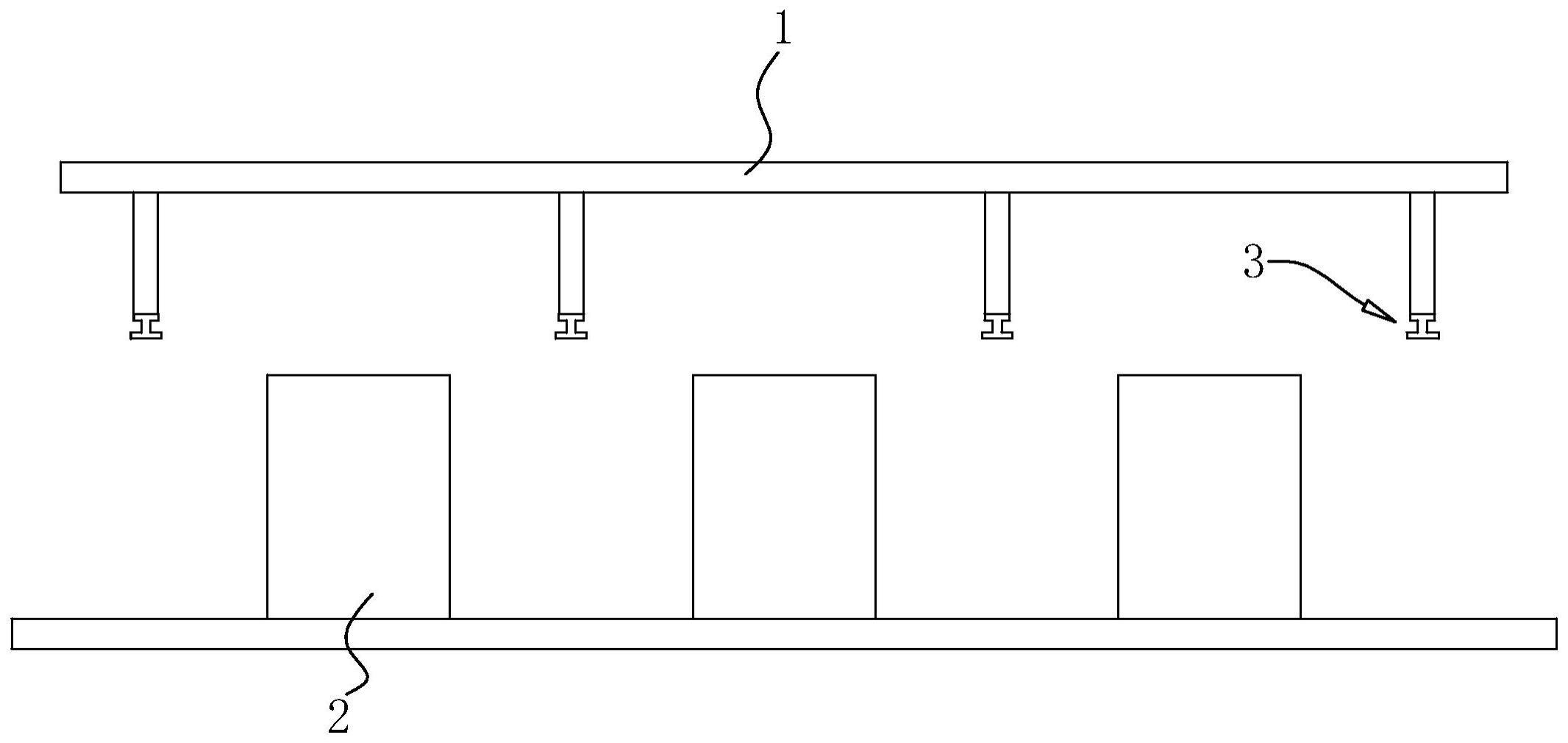
3、目前应用在变电柜巡检的巡检机器人一般是通过在机房内部的顶部设置轨道,然后将巡检机器人悬挂在轨道,巡检机器人沿着轨道行走并且对机房内的机柜进行巡检,以对机柜外侧的仪表盘、指示灯进行拍摄,并将拍摄到的画面传输至终端,以便于工作人员查看变电柜的工作状态。由于巡检机器人沿轨道行走,因此在轨道的端部处设置有用于供巡检机器人自动充电的充电装置,当巡检机器人的电量不足时,能够自行移动至充电装置处进行充电。
4、在上述方案中,由于巡检机器人设置在机房内的顶部,当需要检修巡检机器人时,需要工作人员借助梯子将巡检机器人拆下来之后才能对巡检机器人进行检修,这种对工作人员检修巡检机器人带来不便,因此需要改进。
技术实现思路
1、本技术提供一种城市轨道交通变电站巡检机器人、巡检方法及计算机设备,以解决工作人员检修巡检机器人不便的问题。
2、本技术的上述发明目的一是提供一种城市轨道交通变电站巡检机器人,通过以下技术方案得以实现的:
3、一种城市轨道交通变电站巡检机器人,包括控制器、移动底座、数据检测装置以及行走装置,所述控制器与所述数据检测装置、所述行走装置连接,所述行走装置活动安装于轨道,以夹持于所述轨道/脱离所述轨道;所述行走装置与所述数据检测装置可伸缩连接,所述数据检测装置与所述移动底座可伸缩连接;
4、所述巡检机器人还包括增高装置,所述增高装置的上侧与所述数据检测装置可伸缩连接,所述增高装置的下侧与所述移动底座连接;
5、所述增高装置包括连接座、气囊以及气源,所述连接座与所述数据检测装置可伸缩连接,所述连接座的底部开设有用于安装气源的安装腔,所述气源的出气端与所述气囊的顶部连通,所述气囊的底部设置有出气孔,所述气囊设置有用于启闭所述出气孔的出气电磁阀,所述控制器与所述气源、所述出气电磁阀连接,所述气囊的底部连接于所述移动底座的顶部,所述移动底座开设有用于与所述出气孔连通的避位孔。
6、上述技术方案中,数据检测装置用于检测变电站内部的数据,移动底座与数据检测装置可伸缩连接,行走装置与数据检测装置可伸缩连接,从而能够实现调节巡检机器人整体的长度,同时,由于行走装置活动安装于轨道,因此可以实现行走装置夹持于轨道或者行走装置脱离轨道,有利于实现巡检机器人沿轨道行走或者从轨道处进行落地,由此,巡检机器人可根据控制器的信号进行落地或悬吊于轨道的操作,无需工作人员借助梯子将巡检机器人拆下来之后再进行检修,有助于提高工作人员检修巡检机器人的便利性。而且,将气囊安装于移动底座处,在巡检机器人落地的过程中,控制器控制气源向气囊充气,此时气囊膨胀从而进一步增加巡检机器人的整体高度,从而使得巡检机器人更容易落地,同时,气囊设置在移动底座的顶部,因此在巡检机器人落地时能够起到缓冲作用,对数据检测装置起到保护作用。
7、优选的,所述行走装置包括安装座、至少一对移动件以及调节机构,所述移动件用于沿轨道移动,所述安装座与所述数据检测装置可伸缩连接,所述调节机构安装于所述安装座并与所述移动件连接,以带动所述移动件沿朝向或远离轨道的方向移动。
8、在上述方案中,调节机构安装于安装座,且通过安装座与数据检测装置可伸缩连接,而调节机构用于带动至少一对移动件沿朝向或远离轨道的方向进行,从而实现移动件夹持于轨道或从轨道脱落的功能。
9、优选的,所述调节机构包括第一驱动件、第一齿轮以及两个第一齿条,所述第一齿轮转动设置于所述安装座,所述第一驱动件用于驱动所述第一齿轮转动,两个所述第一齿条分别与所述第一齿轮啮合,两个所述第一齿条沿所述第一齿轮的径向方向对称设置,所述第一齿条的一端穿出所述安装座并与所述移动件连接,以带动所述移动件沿朝向或远离轨道移动;所述安装座开设有用于供所述第一齿条移动的避位腔;所述行走装置还包括用于驱动所述移动件沿轨道移动的行走驱动件。
10、通过采用第一驱动件驱动第一齿轮转动,并且基于两个第一齿条与第一齿轮啮合,因此,第一齿轮转动时能够带动两个第一齿条同时相向或反向移动,由于第一齿条的一端穿出安装座并且与移动件连接,因此第一齿条移动过程中能够带动连接件移动,从而实现移动件夹持轨道或移动件脱离轨道的功能,可以由于可以同步带动两个移动件相向或反向移动,因此可以提高两个移动件作用于导轨的同步性。
11、本技术目的二是提供一种城市轨道交通变电站巡检方法,能够实现巡检机器人自动落地的功能。
12、一种城市轨道交通变电站巡检方法,基于上述方案中任一项所述的城市轨道交通变电站巡检机器人实现,所述方法包括:
13、实时获取落地信息;
14、基于所述落地信息,判断目标环境条件是否满足落地条件;
15、当确定目标环境条件满足落地条件时,则生成伸长信息;
16、基于所述伸长信息,生成充气信息;
17、实时接收执行端与地面的落地高度差信息;
18、当所述落地高度差信息符合阈值高度时,则生成停止充气信息;
19、当所述落地高度差信息符合阈值高度时,向生成松夹信号;
20、响应于返回工作信号并生成数据检测装置工作信号和移动底座工作信号;
21、实时接收轨道图像信息;
22、将所述轨道图像与预设轨道图像对比以确定所述轨道图像是否符合预设轨道图像;
23、当确定轨道图像符合预设轨道图像时,则生成移动底座停止工作信号;
24、生成二次伸长信号以及二次充气信号;
25、实时接收所述行走装置(43)与轨道之间的爬升高度差信息;
26、生成与行走装置(43)相关联的工作控制信息。
27、先实时获取落地信息,然后再基于落地信息来判断当前执行端是否满足落地条件,以提高执行端落地时的准确性以及安全性,当确定目标环境条件满足落地条件时,则生成伸长信息,使得执行端整体的长度增大,有助于执行端安全、稳定落地。
28、优选的,所述基于所述落地信息,判断目标环境条件是否满足落地条件的步骤,包括:
29、基于所述落地信息,获取与目标空间相关联的环境信息,所述环境信息包括相对湿度数据和亮度数据;
30、将所述环境信息与预设环境信息对比,以判断所述环境信息是否符合预设环境信息;
31、当所述环境信息符合预设环境信息时,则获取与所述目标空间相关联的连续图像组;
32、基于所述连续图像组,判断执行端下方是否存在异物;
33、当确定执行端下方不存在异物时,则确定目标环境条件满足落地条件。
34、通过对环境信息以及目标空间内的连续图像组信息进行采集,在确定环境信息符合预设环境信息时,再基于连续图像组信息来确定执行端下方是否存在异物,以便于执行端能够顺利落地。
35、优选的,所述方法还包括:
36、当确定执行端下方存在异物时,对所述连续图像组中每一帧图像进行消除噪声处理;
37、采用opencv算法生成背景模型;
38、基于背景模型计算连续图像组中的若干帧图像和背景模型之间的像素差信息;
39、基于像素差信息来确定异物的状态,所述异物的状态包括移动状态和静止状态;
40、当确定异物处于静止状态时,则确定异物的位置。
41、在上述方案中,通过opencv算法以及像素差信息的结合来实现判断异物是否处于静止状态,当异物处于静止状态时,则确定异物的位置,从而更加准确的判断异物相对于执行端的位置,以便于执行端判断是否满足落地条件。
42、优选的,在所述确定异物处于静止状态的步骤之后,还包括:
43、以执行端的位置作为起点信息,测量执行端的正下方与所述起点信息的距离信息;
44、当所述距离信息大于安全距离阈值信息时,则确定目标环境条件满足落地条件。
45、优选的,所述基于所述落地信息,判断目标环境条件是否满足落地条件的步骤,包括:
46、基于所述落地信息,获取与目标空间相关联的环境信息,
47、当所述环境信息为相对湿度数据时,则将所述相对湿度数据与相对湿度阈值对比;
48、当所述相对湿度数据超出相对湿度阈值时,则确定相对湿度等级;
49、获取与所述目标空间相关联的连续图像组;
50、基于所述相对湿度等级,确定预设图像类型,所述预设图像类型包括预设水滩图像、预设工具图像;
51、当所述相对湿度等级为高级时,则将所述连续图像组与预设水滩图像进行对比,以确定所述连续图像组是否与水滩相关联;
52、当确定所述连续图像组与水滩相关联时;则采用canny算法计算水滩的轮廓信息;
53、基于所述轮廓信息,确定水滩与所述执行端的最小水平距离信息;
54、将所述最小水平距离信息与安全距离阈值信息对比;
55、当所述最小水平距离信息大于安全距离阈值信息时,则确定目标环境条件满足落地条件。
56、在上述方案中,当环境信息为相对湿度数据时,则先将相对湿度数据与相对湿度阈值进行比对,以确定相对湿度等级,当相对湿度等级为高级时,则优先将预设图像类型中的预设水滩图像与连续图像组进行对比,以便于快速判断目标空间内是否存在水滩,当目标空间内存在水滩时,则判断水滩与执行端之间的最小水平距离,并将最小水平距离与安全距离阈值信息进行比对,以评估执行端是否能落地,有助于避免执行端落到水滩中而发生打滑现象。
57、本技术目的三是提供一种计算机设备,能够实现巡检机器人自动落地的功能。
58、本技术的上述发明目的三是通过以下技术方案得以实现的:
59、一种计算机设备,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行上述任一项方案所述的城市轨道交通变电站巡检方法的计算机程序。
60、本技术目的四是提供一种计算机可读存储介质。
61、本技术的上述发明目的四是通过以下技术方案得以实现的:
62、一种计算机可读存储介质,存储有能够被处理器加载并执行上述任一种城市轨道交通变电站巡检方法的计算机程序。
63、综上所述,本技术的有益技术效果如下:
64、数据检测装置用于检测变电站内部的数据,移动底座与数据检测装置可伸缩连接,行走装置与数据检测装置可伸缩连接,从而能够实现调节巡检机器人整体的长度,同时,由于行走装置活动安装于轨道,因此可以实现行走装置夹持于轨道或者行走装置脱离轨道,有利于实现巡检机器人沿轨道行走或者从轨道处进行落地,由此,巡检机器人可根据控制器的信号进行落地或悬吊于轨道的操作,无需工作人员借助梯子将巡检机器人拆下来之后再进行检修,有助于提高工作人员检修巡检机器人的便利性。
- 还没有人留言评论。精彩留言会获得点赞!