基于电流变液的万向球头、机械臂、机器人及其工作方法与流程
1.本发明属于枢轴连接技术领域,尤其涉及一种基于电流变液的万向球头、机械臂、机器人及其工作方法。
背景技术:
2.万向球头因为其具有的高灵活性,被普遍应用于两个活动杆的连接,便于灵活调整活动杆的姿态。比如,在手术机器人等装置中,因手术过程中手术机器人的机械臂需要不断的执行多自由度动作,需要机械臂的连接处具有较高的灵活性,所以,万向球头满足了机械臂执行多自由度动作过程中的灵活性要求。
3.发明人发现,万向球头连接的活动杆调整到预定位置后,万向球头需要锁定,目前多采用螺杆或顶杆等顶紧万向球头完成锁定的方式,因螺杆或顶杆等动作时,控制过程和动作的执行过程均需要一定的时间,导致现有万向球头的锁定方式效率极低;同时,在锁定的过程中,会出现因螺杆或顶杆和万向球头表面受力不稳定故障带来的活动杆变更位置的风险。
技术实现要素:
4.本发明为了解决上述问题,提出了一种基于电流变液的万向球头、机械臂、机器人及其工作方法,可以应用于需锁定的万向球头中,实现两活动杆连接时的万向活动和锁定功能,且本发明中万向球头的结构紧凑;需要对万向球头进行调整时,可以切换为断电状态,此时电流变液为液态,万向球头可自由活动,还可以切换为通电状态,此时电流变液为固态,万向球头锁定,即使受外部扰动也可保持预定位置锁定。
5.为了实现上述目的,第一方面,本发明提供了一种基于电流变液的万向球头,采用如下技术方案:一种基于电流变液的万向球头,包括扣盖、外壳、活动球头和密封硅胶套;所述活动球头的转动部通过所述外壳设置在所述扣盖内;所述扣盖、所述外壳和所述活动球头设置在所述密封硅胶套内,所述密封硅胶套内设置有电流变液。
6.进一步的,所述活动球头上设置有第一连接点,所述外壳上设置有第二连接点。
7.进一步的,所述活动球头和所述外壳上均设置有绝缘连杆。
8.进一步的,所述活动球头的球面上开设有多个圆形孔。
9.进一步的,所述圆形孔的边缘处倒圆角。
10.进一步的,所述扣盖和所述外壳的内表面设置有多个圆形凸起。
11.进一步的,所述圆形凸起的直径大于所述圆形孔的直径。
12.为了实现上述目的,第二方面,本发明还提供了一种机械臂,采用如下技术方案:一种机械臂,包括多个通过关节连接的活动杆;所述关节采用如第一方面中所述的基于电流变液的万向球头。
13.为了实现上述目的,第三方面,本发明还提供了一种机器人,采用如下技术方案:一种机器人,包括机器人本体,以及设置在所述机器人本体上的如第二方面中所述的机械臂。
14.为了实现上述目的,第四方面,本发明还提供了一种基于电流变液的万向球头工作方法,采用如下技术方案:一种基于电流变液的万向球头工作方法,采用了如第一方面中所述的基于电流变液的万向球头,包括:向活动球头和外壳上施加一定的电场强度,电流变液由液态变为固态,使得活动球头相对于扣盖和外壳锁定;活动球头在扣盖内需要再次调整角度时,取消或降低电场强度,电流变液由固态变为液态,调整活动球头相对于扣盖的角度。
15.与现有技术相比,本发明的有益效果为:1、本发明将扣盖、外壳和活动球头设置在密封硅胶套内,在包裹扣盖、外壳和活动球头的密封硅胶套内充满电流变液;在活动球头在扣盖内调整到满足要求角度时,通过向万向球头施加一定的电场强度,使得电流变液由液态变为固态,使得万向球头锁定;活动球头在扣盖内需要再次调整角度时,通过取消或降低万向球头内施加的电场强度,使得电流变液由固态变为液态;通过电流变液在液态和固态间变换来实现万向球头的锁定和调整,代替了采用螺杆或顶杆等实现万向球头的锁定和调整的方式,缩短了控制和执行时间,避免了顶紧过程中机械部件间受力不稳定带来的故障问题,提高了效率和安全性;2、本发明中,利用电流变液在一定电场强度作用下变为固态以及降低或取消电场强度电后变为液态的性能,保证整体结构的紧凑性,锁紧动作迅速;电流变液在液态状态下,可以作为润滑剂,使万向球头的自由活动更加顺畅3、本发明中活动球头和外壳上设置圆形孔和圆形凸起,用于弥补电流变液抗剪切性能较差的缺点,保证锁定的可靠度。
附图说明
16.构成本实施例的一部分的说明书附图用来提供对本实施例的进一步理解,本实施例的示意性实施例及其说明用于解释本实施例,并不构成对本实施例的不当限定。
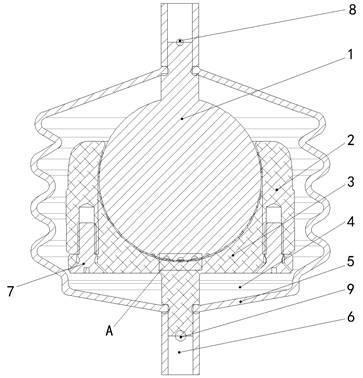
17.图1为本发明实施例1的结构示意图;图2为本发明实施例1的图1中a部放大图;图3为本发明实施例1的外壳示意图;图4为本发明实施例1的活动球头示意图;其中,1、活动球头;2、扣盖;3、外壳;4、电流变液;5、密封硅胶套;6、绝缘连杆;7、螺钉;8、第一连接点;9、第二连接点;10、圆形孔;11、圆形凸起。
具体实施方式
18.下面结合附图与实施例对本发明作进一步说明。
19.应该指出,以下详细说明都是示例性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
20.电流变液,可以在电场的作用下发生液态和固态的转变,当外加电场强度低于某
个临界值时,电流变液呈液态;当电场强度高于这个临界值时,电流变液变成固态,而且这种变化是可逆的,去除电场后,会以毫秒量级的速度瞬间恢复到原来的状态,电流变液硬度随着电场强度的增大而增加。
21.实施例1:如图1所示,本实施例提供了一种基于电流变液的万向球头,包括活动球头1、扣盖2、外壳3、电流变液4、密封硅胶套5、绝缘连杆6、螺钉7、第一连接点8、第二连接点9、圆形孔10和圆形凸起11;所述活动球头1的转动部通过所述外壳3设置在所述扣盖2内;可以理解的,所述扣盖2内开设有容纳所述活动球头1的圆弧形空间;所述扣盖2上方开设通孔,所述活动球头1的转动部在所述活动球头1的圆弧形空间内,所述扣盖2上方开设通孔的直径小于所述活动球头1上的最大截面直径,避免所述活动球头1在所述圆弧形空间内脱离;所述外壳3内侧开设弧形槽,通过所述螺钉7将所述外壳3固定在所述扣盖2上,所述外壳3内侧的弧形槽和所述扣盖2内开设的圆弧形空间共同构成容纳所述活动球头1转动部的整体空间;所述扣盖2、所述外壳3和所述活动球头1设置在所述密封硅胶套5内,所述密封硅胶套5内设置有电流变液4。
22.具体的,将扣盖、外壳和活动球头设置在密封硅胶套内,在包裹扣盖、外壳和活动球头的密封硅胶套内充满电流变液4;在活动球头在扣盖内调整到满足要求角度时,通过向万向球头施加一定的电场强度,使得电流变液4由液态变为固态,使得万向球头锁定;活动球头在扣盖内需要再次调整角度时,通过取消或降低万向球头内施加的电场强度,使得电流变液4由固态变为液态;通过电流变液4在液态和固态间变换来实现万向球头的锁定和调整,代替了采用螺杆或顶杆等实现万向球头的锁定和调整的方式,提高了效率和安全性。
23.电流变液4填充于所述活动球头1和所述扣盖2及所述外壳3的间隙中,间隙越小,产生电流变液4固化的电场强度一定的情况下,电流变液4固化的所需施加的电压越低。
24.所述活动球头1上设置有第一连接点8,所述外壳3上设置有第二连接点9;所述第一连接点8和所述第二连接点9可以用于连接导线,实现电场的提供。
25.所述活动球头1和所述外壳3上均设置有绝缘连杆6,所述绝缘连杆6可以用于与外部活动杆等部件连接。可选的,所述活动球头1和所述外壳3上均开设有螺纹,用于连接开设有外螺纹的所述绝缘连杆6;所述绝缘连杆6设置中空通道,用于导线的穿过。
26.如图2、图3和图4所示,为了提高电流变液4变为固态时,对所述活动球头1和所述外壳3等锁定的强度,在所述活动球头1的球面上开设有多个圆形孔10,以及在所述扣盖2和所述外壳3的内表面设置有多个圆形凸起11;通过电流变液4在所述圆形孔10的填充,以及在圆形凸起11周围的填充来达到提高锁定的强度。
27.多个圆形孔10均匀分布在所述活动球头1的球面上;多个圆形凸起11均匀设置在所述扣盖2和所述外壳3的内表面上,所述圆形凸起11为绝缘凸起;所述圆形凸起11采用绝缘凸起,用于将所述活动球头1和所述扣盖2以及所述外壳3绝缘,保证通电时,间隙中稳定形成电场。
28.在所述圆形孔10的边缘处倒圆角,用于增大电流变液4的相对切面面积,提高锁定的可靠度。
29.所述圆形凸起11的直径大于所述圆形孔10的直径,避免卡死现象。
30.本实施例的工作过程或原理为:当对所述活动球头1和所述外壳3不进行通电时,所述活动球头1和所述外壳3中间没有产生电场,电流变液4为液态,此时所述活动球头1和所述外壳3相对自由,可以相对活动,调整两个绝缘连杆6间的相对位置。当对所述活动球头1和所述外壳3进行通电时,所述活动球头1和所述外壳3的间隙中间产生电场,电流变液4为固态,此时所述活动球头1和所述外壳3相对固定,两个绝缘连杆6相对锁定。所述活动球头1和所述外壳3上的圆形孔10和圆形凸起11用于弥补电流变液4抗剪切性能较差的缺点,保证锁定的可靠度。
31.实施例2:本实施例提供了一种机械臂,包括多个通过关节连接的活动杆;所述关节采用如实施例1中所述的基于电流变液的万向球头;相邻活动杆之间通过活动球头1和外壳3上的绝缘连杆6连接。
32.实施例3:本实施例提供了一种机器人,包括机器人本体,以及设置在所述机器人本体上的如实施例2中所述的机械臂。
33.实施例4:本实施例提供了一种基于电流变液的万向球头工作方法,采用了如实施例1中所述的基于电流变液的万向球头,包括:向活动球头1和外壳3上施加一定的电场强度,电流变液4由液态变为固态,使得活动球头1相对于扣盖2和外壳3锁定;活动球头1在扣盖2内需要再次调整角度时,取消或降低电场强度,电流变液4由固态变为液态,调整活动球头1相对于扣盖2的角度。
34.以上所述仅为本实施例的优选实施例而已,并不用于限制本实施例,对于本领域的技术人员来说,本实施例可以有各种更改和变化。凡在本实施例的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1